 電子發(fā)燒友App
電子發(fā)燒友App



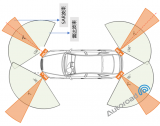
隨著城鎮(zhèn)化水平的不斷提高以及經(jīng)濟(jì)水平的快速增長(zhǎng),人們對(duì)汽車的需求量日益旺盛,汽車保有量持續(xù)增多。隨之而來的是交通環(huán)境擁擠,城市停車位資源緊張,停車位空間小等問題。在這種環(huán)境下泊車容易引起局部交通堵塞、剮蹭事故的發(fā)生。在較大停車場(chǎng)停車容易產(chǎn)生找車位難、找車難等問題,給駕駛員帶來困擾。另一方面,由于車輛和人均受自身?xiàng)l件影響而存在“視覺盲區(qū)”,泊車往往耗費(fèi)大量的時(shí)間和精力,一直是新老司機(jī)的駕駛痛點(diǎn)。因此產(chǎn)業(yè)界致力于運(yùn)用新技術(shù)讓泊車變得更智能、更安全、更便捷。自動(dòng)泊車的出現(xiàn)和發(fā)展為解決泊車問題提供新思路,有效解決駕駛員找位難、停車難等痛點(diǎn)。并且作為自動(dòng)駕駛出行完整生態(tài)不可或缺的一環(huán),提供了解決自動(dòng)駕駛“最后一公里”難題的方法。 ?
01什么是“自動(dòng)泊車”
世界上第一輛汽車是德國人卡爾·本茨于1885年制造的,盡管和現(xiàn)代汽車相比它的性能并不完善,但由于使用到內(nèi)燃機(jī)和實(shí)現(xiàn)了自動(dòng)化,它的誕生具有劃時(shí)代的重要意義。細(xì)心的朋友不難發(fā)現(xiàn),汽車的英文”Automobile“,就分別有“自動(dòng)”和“移動(dòng)”的復(fù)合含義。
從第一部真正意義上的汽車面世至今,已經(jīng)過了100多年的時(shí)間,汽車不僅在自動(dòng)化和電氣化方面有了飛速發(fā)展,還出現(xiàn)了智能化的趨勢(shì)。“自動(dòng)泊車”逐漸成為大家熟悉的功能,透過它我們能看到汽車智能化發(fā)展的縮影。
自動(dòng)泊車系統(tǒng)簡(jiǎn)稱APS,它是英文Automated Parking System的縮寫。
搭載有自動(dòng)泊車功能的汽車可以不需要人工干預(yù),通過車載傳感器、處理器和控制系統(tǒng)的幫助就可以實(shí)現(xiàn)自動(dòng)識(shí)別車位,并自動(dòng)完成泊車入位的過程。一般來說,在20萬以上的中高端汽車上往往才有搭載,或者作為一項(xiàng)選裝功能獨(dú)立存在。
自動(dòng)泊車系統(tǒng)可以大大簡(jiǎn)化泊車過程,特別是在極端狹窄的地方,或者是對(duì)于新手而言,自動(dòng)泊車系統(tǒng)可以帶來更加智能和更加便捷的體驗(yàn)。
02 “自動(dòng)泊車”原理是什么?
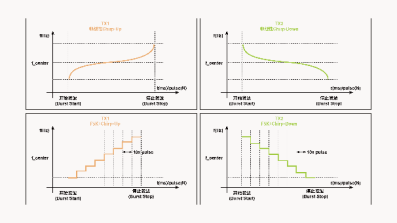
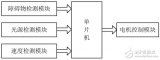
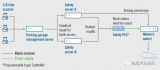
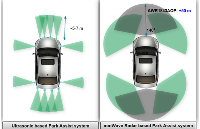
? 自動(dòng)泊車系統(tǒng)由多組傳感器組成,比如遍布車身的雷達(dá)、攝像頭等等,在采集好圖像、距離等相關(guān)數(shù)據(jù)后,數(shù)據(jù)會(huì)傳輸給處理器,處理器將采集到的數(shù)據(jù)分析處理,形成自動(dòng)泊車策略再將其轉(zhuǎn)換成信號(hào),控制系統(tǒng)接收到信號(hào)后依據(jù)指令控制汽車做出諸如轉(zhuǎn)向、倒車和制動(dòng)等動(dòng)作,直至泊車過程完成。 ? 自動(dòng)泊車過程可以分為三個(gè)部分:車位探測(cè)、路徑規(guī)劃和路徑追蹤,就是我們通常理解的數(shù)據(jù)采集、路線生成和泊車執(zhí)行。 ?
自動(dòng)泊車系統(tǒng)相關(guān)技術(shù)的研究最早在國外展開。該系統(tǒng)最早在 1992 年的德國大眾概念車上搭載,由于成本較高,體積過大,沒有將該系統(tǒng)量產(chǎn);2003 年豐田普銳斯開始提供可選自動(dòng)泊車功能;在國內(nèi),20 世紀(jì) 90 年代初出現(xiàn)的倒車?yán)走_(dá)以及倒車影像,由于成本低、泊車輔助效果較好,目前依然是被廣泛采用的泊車輔助手段。
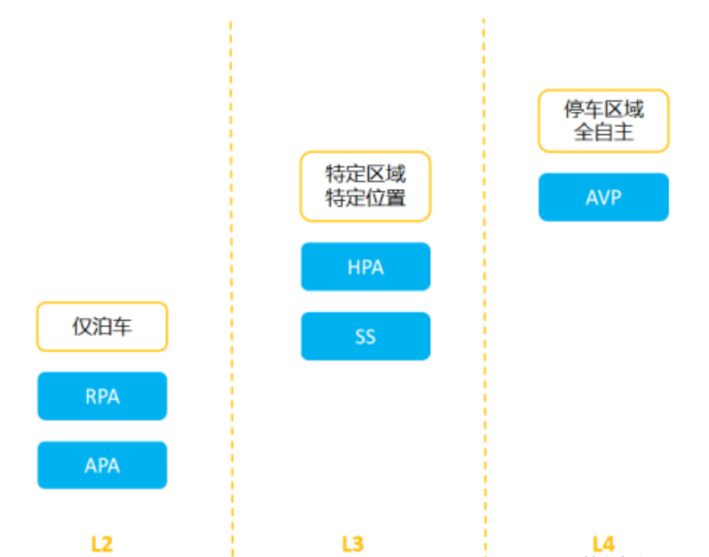
? 隨著超聲波檢測(cè)技術(shù)和汽車線控底盤技術(shù)的發(fā)展,以及車企對(duì)消費(fèi)者需求的關(guān)注,自動(dòng)泊車系統(tǒng)開始出現(xiàn)并逐漸演進(jìn)。自動(dòng)泊車系統(tǒng)的發(fā)展大致經(jīng)歷了半自動(dòng)泊車、全自動(dòng)泊車、記憶泊車和自主代客泊車四個(gè)階段。21世紀(jì)初量產(chǎn)的半自動(dòng)泊車由系統(tǒng)自動(dòng)控制轉(zhuǎn)向盤,駕駛員控制加速及制動(dòng)踏板,用戶體驗(yàn)不佳,自動(dòng)泊車功能使用率很低;近年來逐漸普及的全自動(dòng)泊車系統(tǒng)解放了駕駛員的手和腳,用戶體驗(yàn)得到質(zhì)的提升,受到消費(fèi)者的關(guān)注和歡迎。 ? 下圖匯總了當(dāng)前主流的泊車功能,以及其對(duì)應(yīng)的智能化等級(jí)、功能實(shí)現(xiàn)效果等。 ?

資料來源:九章智駕
其中AVP,全稱Automated Valet Parking,即自主代客泊車。AVP是真正意義上的全自動(dòng)駕駛,車輛可以自行進(jìn)入完全陌生的停車場(chǎng),不需要先行學(xué)習(xí),就能完成所有的泊車動(dòng)作,并且不需要駕駛員在車上。其最終目標(biāo)是取代傳統(tǒng)的人工代客泊車,幫助用戶節(jié)省大量的停車時(shí)間,解決高峰期排隊(duì)停車的痛點(diǎn)。
AVP作為當(dāng)前泊車場(chǎng)景的功能天花板,涉及的細(xì)分場(chǎng)景復(fù)雜,技術(shù)難度大,并且對(duì)保證車輛安全性來說,也是巨大的挑戰(zhàn)。作為L(zhǎng)4級(jí)別的智能駕駛,目前對(duì)軟硬件,尤其是算法和安全性要求很高。
資料來源:九章智駕
?
03現(xiàn)實(shí)中的“自動(dòng)泊車”??
現(xiàn)實(shí)中的自動(dòng)泊車功能使用起來既簡(jiǎn)便又高效,它可以輔助駕駛員完成自動(dòng)泊入、水平泊出、自選車位等操作。
例如,泊車場(chǎng)景主要發(fā)生在停車場(chǎng),按泊車的完整流程,泊車場(chǎng)景包括停車場(chǎng)內(nèi)自動(dòng)行駛、搜索車位、泊入和泊出車位等。
3.1 停車場(chǎng)內(nèi)行駛
當(dāng)前的停車場(chǎng)類型主要可以分為以下4種:地下停車庫、停車樓、露天停車場(chǎng)和路邊臨時(shí)停車位。不同類型停車場(chǎng)的基礎(chǔ)設(shè)施、路面狀況、光照條件等都各不相同,因此車輛在不同停車場(chǎng)內(nèi)行駛的表現(xiàn)也會(huì)有差異。
總體來說,在停車場(chǎng)內(nèi)行駛,主要考察車輛的軌跡規(guī)劃能力和感知定位能力,以及對(duì)障礙物的識(shí)別能力。
3.2 搜索車位
搜索車位的用戶體驗(yàn),主要考察車輛對(duì)車位的識(shí)別能力。車位識(shí)別的準(zhǔn)確率越高,說明車位識(shí)別能力越強(qiáng),用戶的體驗(yàn)也會(huì)越好。
停車位的類型多種多樣,按車位線情況可分為標(biāo)線車位與非標(biāo)線車位,按車位方向可分為垂直車位、水平車位與斜列車位等。
3.3 泊入和泊出車位
泊入車位是泊車過程的最后一步,也是自動(dòng)泊車的最初應(yīng)用場(chǎng)景。當(dāng)搜索到適合的車位時(shí),智駕系統(tǒng)便控制車輛自動(dòng)泊入車位,期間的橫縱向控制和擋位切換等操作,都由系統(tǒng)自動(dòng)完成。
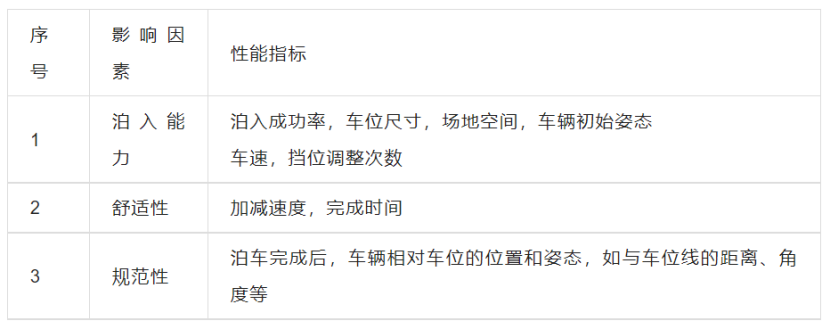
資料來源:九章智駕
泊入能力是影響泊入體驗(yàn)的首要因素,體現(xiàn)了系統(tǒng)的泊車能力。泊入能力的指標(biāo)包括成功率、可泊入的車位尺寸范圍、車速范圍等,需要綜合考慮車輛狀態(tài)參數(shù)和車位參數(shù)等。
舒適性同樣是重要的影響因素。對(duì)于駕駛員在車上的自動(dòng)泊車系統(tǒng),舒適性直接影響了用戶的體驗(yàn)。車輛在泊車過程中的加減速度和系統(tǒng)完成泊車的時(shí)間等指標(biāo),可以體現(xiàn)舒適性。
泊車的規(guī)范性是另一項(xiàng)影響因素,停放規(guī)范整齊的車輛,會(huì)增加用戶的好感和信任。是否停放端正、位置是否居中、與車位線或相鄰車輛的距離如何,都反映了系統(tǒng)泊車的規(guī)范性。
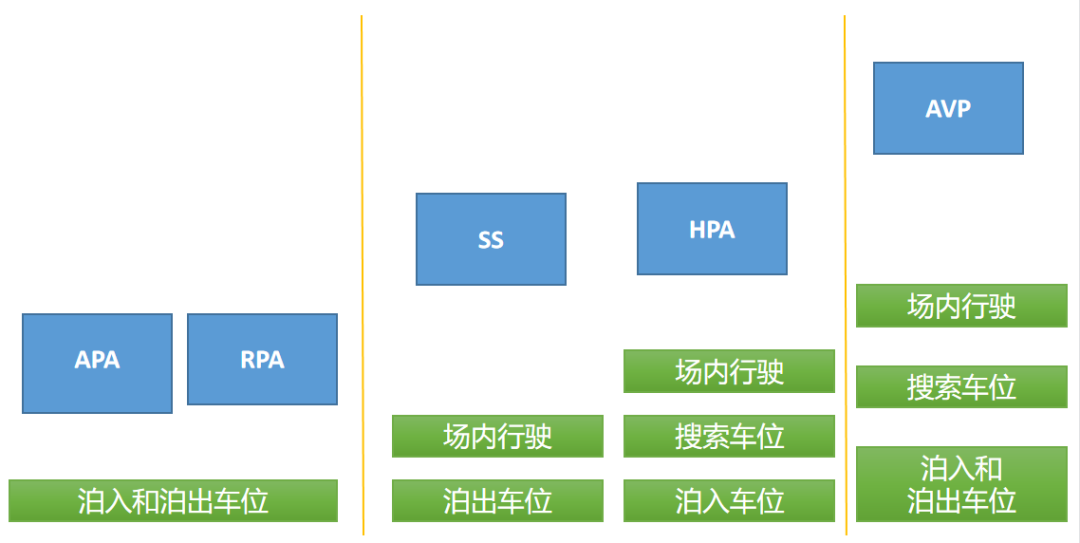
3.4?泊車功能與場(chǎng)景
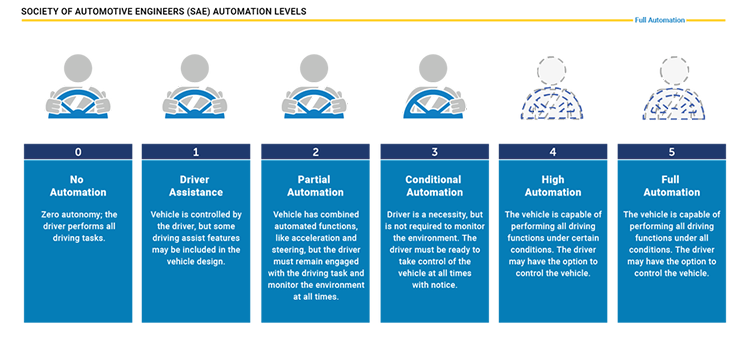
泊車功能包括L2級(jí)別的APA、RPA,L3級(jí)別的SS、HPA,L4級(jí)別的AVP。
資料來源:九章智駕
AVP作為泊車功能的終極解決方案,屬于L4功能,是所有泊車功能的集大成者,其作用區(qū)域覆蓋了從車主下車,到車輛泊入的全過程,以及相反的召喚全過程。AVP的應(yīng)用場(chǎng)景是前文提到的所有泊車場(chǎng)景的疊加,包括停車場(chǎng)內(nèi)行駛、搜索車位、泊入和泊出車位。AVP功能需要全面關(guān)注泊車全部場(chǎng)景下的用戶體驗(yàn)和性能指標(biāo)。另外,由于AVP功能開啟時(shí),用戶已經(jīng)離開車輛,因此高安全性,也是至關(guān)重要的,需要有足夠的安全冗余設(shè)計(jì)。
?
04AVP落地難,該如何解決?
與目前已經(jīng)量產(chǎn)的自動(dòng)泊車功能相比,AVP是更高級(jí)別的自動(dòng)泊車,可以認(rèn)為:當(dāng)前的自動(dòng)泊車是AVP的基礎(chǔ)。
雖然從目前行業(yè)內(nèi)的動(dòng)態(tài)來看,大家都在為AVP的量產(chǎn)落地而努力著,然而AVP 距離完全落地還有一段較長(zhǎng)的路要走。作為點(diǎn)到點(diǎn)的自動(dòng)出行中較為關(guān)鍵的起點(diǎn)和終點(diǎn)階段,AVP將是各路玩家的必爭(zhēng)之地。
如今“高精地圖成為主機(jī)廠通往自動(dòng)駕駛必經(jīng)之路”的觀點(diǎn)已在市場(chǎng)中成為共識(shí),AVP作為自動(dòng)駕駛自動(dòng)泊車的重要一環(huán),也同樣如此。晶眾地圖在2020年提出這樣的想法:“出行的本質(zhì)應(yīng)觸及人的最終需求,導(dǎo)航應(yīng)基于端點(diǎn)到端點(diǎn)——從人的出發(fā)點(diǎn),到停車入庫,而不是把車開到某個(gè)建筑物再去找停車位。”現(xiàn)在已成為了現(xiàn)實(shí)。
晶眾AVP高精度地圖HD-Parking是一款應(yīng)用適用于AVP的停車場(chǎng)高精度地圖數(shù)據(jù)產(chǎn)品,包含停車場(chǎng)高精度地圖數(shù)據(jù)、地圖引擎,并提供OTA服務(wù)。基于此,在與頭部合資品牌主機(jī)廠的合作中,晶眾地圖成功實(shí)現(xiàn)了從車位預(yù)約、室外導(dǎo)航到停車場(chǎng)內(nèi)導(dǎo)航自動(dòng)切換,服務(wù)同時(shí)覆蓋停車位自動(dòng)記錄、反向?qū)ぼ嚨纫幌盗泄δ茳c(diǎn),從而形成停車全場(chǎng)景高精度服務(wù)閉環(huán)。
晶眾地圖分兩塊同步前進(jìn):第一塊將最先實(shí)現(xiàn)網(wǎng)聯(lián)化產(chǎn)品的量產(chǎn),也就是T3停車助手的量產(chǎn);第二塊,在自動(dòng)駕駛AVP領(lǐng)域,作為高精地圖供應(yīng)商,具備了服務(wù)方案商的配套能力。
“T3停車導(dǎo)航(車機(jī)版)”是一款車載停車應(yīng)用產(chǎn)品,解決用戶駕車出行最后一公里的停車難題。基于停車場(chǎng)高精度地圖,融合停車場(chǎng)動(dòng)態(tài)信息,實(shí)現(xiàn)直接導(dǎo)航到停車場(chǎng)的具體車位。當(dāng)車輛接近停車場(chǎng)時(shí),導(dǎo)航系統(tǒng)會(huì)自動(dòng)切換至停車場(chǎng)地圖并進(jìn)行詳細(xì)導(dǎo)航,這對(duì)于大型商超、醫(yī)院、交通樞紐等復(fù)雜停車場(chǎng)景下的幫助非常可觀。本產(chǎn)品包含停車場(chǎng)搜索、車位查詢、車位級(jí)導(dǎo)航、充電樁搜索、位置信息分享、反向?qū)ぼ嚒IP車位預(yù)約、繳費(fèi)等功能。

產(chǎn)品定位
晶眾地圖通過全面考慮功能與場(chǎng)景的關(guān)聯(lián),基于功能規(guī)劃和應(yīng)用場(chǎng)景,將用戶體驗(yàn)全程納入開發(fā)過程。T3停車導(dǎo)航(車機(jī)版)在問世后不斷更新改進(jìn),具備了以下特點(diǎn):
1)停車場(chǎng)高精度地圖同時(shí)應(yīng)用到移動(dòng)端&車機(jī)端
2)幫助車主隨時(shí)掌握車輛位置(自動(dòng)記錄車輛停放位置并同步到移動(dòng)端)
3)一鍵導(dǎo)航至停車場(chǎng)出口、反向?qū)ぼ?/p>
4)分享車輛位置信息給好友或者代駕
5)不需要外接任何設(shè)備,成本低

產(chǎn)品應(yīng)用場(chǎng)景
現(xiàn)在,全球汽車已經(jīng)迎來“新四化”時(shí)代,電動(dòng)化、智能化成為車企競(jìng)相追捧的新熱點(diǎn)。自動(dòng)駕駛技術(shù)作為汽車智能化的宏偉愿景,自動(dòng)泊車是其重要一環(huán)。讓創(chuàng)新科技賦能智慧生活,在汽車智能化新征程上,晶眾地圖將持續(xù)發(fā)力,賦能合作伙伴,共同推動(dòng)出行新時(shí)代的到來!
編輯:黃飛




















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論