 看似簡單的自動泊車需要哪些技術支撐?
看似簡單的自動泊車需要哪些技術支撐?

[首發于智駕最前沿微信公眾號]要實現自動泊車,背后需要哪些技術作為支撐?自動泊車作為現在很多車主應用非常多的一項功能,看似只是簡單的入庫操作,但想要完美入庫,其實需要非常多的技術支持。

感知是基礎:看得清、分得明、跟得牢
想實現自動泊車,車輛首先得“感知”周圍環境,這不只是拍一張照片那么簡單,而是要準確識別出車庫周邊障礙物的位置、形狀、速度及類別。常用的傳感器包括超聲波雷達、攝像頭、毫米波雷達和激光雷達等。超聲波成本低,在短距離測距中表現穩定,常用于側向和近距離障礙物檢測;攝像頭能識別車位線、行人、車牌等,信息量豐富,但容易受光線影響;毫米波雷達抗干擾強,還能測速,適合在有移動物體的場景中輔助判斷;激光雷達則能生成高精度三維點云,距離和角度信息準確,利于環境建模,但成本和數據量較大。
這些傳感器采集的數據需要融合使用,才能在各種環境下穩定工作。傳感器融合不僅僅是數據疊加,還涉及時間同步、坐標轉換和置信度管理,系統需要根據每個傳感器在當前場景下的可靠性,動態加權使用它們的信息。在停車場這類場景中,通常由超聲波進行車位盲探測,攝像頭識別車位線和類型,雷達或激光雷達則負責障礙物的精確定位與跟蹤,多種傳感器配合,才能兼顧發現車位與安全避障。
目標檢測與多目標跟蹤也是感知中的重要環節。系統需要能識別靜態的車位、停放的車輛,以及行人、自行車等動態目標,并在車輛移動過程中持續追蹤。在泊車過程中,周圍還可能有目標突然出現或移動,系統必須快速判斷其運動意圖并實時調整規劃。這其中就需要應用到包括基于卷積神經網絡的目標檢測、基于卡爾曼濾波或更復雜濾波算法的目標跟蹤,以及結合點云與圖像特征的識別等方法。感知模塊的輸出不僅是“有障礙物”,還要提供具體的物理坐標、速度向量和分類置信度,這些信息將直接用于后續的路徑規劃與控制。

定位與地圖:明確自身與車位的位置
自動泊車對定位精度的要求遠高于一般城市道路駕駛,尤其是在地下停車場這類GPS信號弱的環境。實現高精度定位通常需要多種技術組合。視覺SLAM是常用方案之一,通過攝像頭或雙目視覺可以構建局部地圖并估計車輛位置,其優點是不依賴外部基站,但對環境光照和紋理有一定要求。結合標簽、二維碼或已知特征點進行輔助定位,能進一步提高系統的魯棒性。還有一些廠商會在停車場部署定位信標或利用場內現有攝像頭,以場端輔助的方式增強車輛定位能力。這類偏場端的方案可以將部分感知與定位任務從車端轉移至場端,減輕車輛自身的傳感器負擔,但這一方案需要停車場進行配套升級,僅適用于社區、園區或商業中心等封閉場景中。
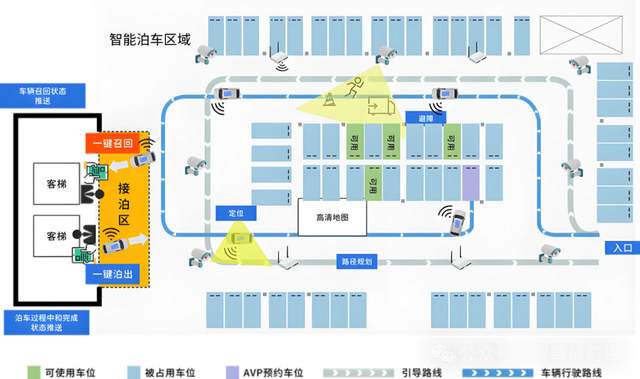
基于車端的自動泊車示意圖,圖片源自網絡
地圖在自動泊車中也扮演著重要角色。系統不僅需要全局導航用的道路級地圖,還需要包含車位尺寸、車道線位置、出入口、坡度、盲區等詳細信息的“車位級”地圖。高精地圖能幫助系統提前了解目標車位的準確位置與環境約束,從而降低規劃階段的不確定性。但是高精地圖需要持續更新,對于那些車位經常變動的停車場,地圖的同步與維護機制一定要跟上。為解決地下車庫GPS不可用的問題,系統還會將視覺定位、慣性測量單元(IMU)和車輪里程計的數據進行緊耦合處理,從而在復雜環境中實現連續且準確的位姿估計。

規劃與控制:規劃路徑并精準執行
在獲取感知與定位信息后,下一步是將車輛從當前位置安全、準確地移動至目標車位,其核心技術涉及到路徑規劃與跟蹤控制。路徑規劃可以分為全局規劃和局部規劃兩個層面。全局規劃負責生成從起點到目標車位附近的可行駛路徑,常用算法包括網格搜索、A*等,需考慮通行規則與場景約束。局部規劃會更為細節,它要根據實時感知到的動態障礙或傳感器誤差,及時調整行駛軌跡,在避障的同時完成倒庫、對位等復雜操作。對此常用的方法有采樣法、優化法,或帶約束的軌跡優化算法,以生成平滑且可執行的軌跡。
車輛的實際運動還受到底盤幾何與動力學約束。大多數乘用車采用阿克曼轉向模型,具有最小轉彎半徑、轉向延遲和與速度相關的橫向動態特性。控制層負責將規劃好的軌跡轉化為轉向角與加減速指令,常用的控制方法包括PID控制、橫向的純追蹤算法以及模型預測控制(MPC)。MPC在處理復雜約束時表現優異,因其能在生成控制指令時綜合考慮車輛動力學和輸入飽和等問題,但計算量較大,對硬件算力要求較高。為保證控制精度,系統還需對轉向、制動和驅動系統的響應進行建模與補償,并在運行過程中實時估計執行誤差,實現閉環修正。
泊車過程中,無論是單次入庫還是多次“揉庫”,都對控制器的魯棒性與定位精度提出不同要求,單次入庫更依賴高精度的路徑計算與執行,多次調整入庫則更需要系統具備持續的閉環反饋與糾偏能力。

確保安全:軟硬結合,嚴控風險
將上述模塊整合為一套能夠在真實場景中長期穩定運行的自動泊車系統,離不開大量的前期工作。自動泊車系統通常運行在車載SoC上,依賴實時操作系統或符合車規的中間件進行任務調度與通信。車載總線從傳統CAN向以太網延伸,以支持攝像頭視頻、雷達點云等高帶寬數據的傳輸。自動泊車的軟件設計也需遵循AUTOSAR等車規標準,或基于ROS等框架進行輕量化實現,并滿足實時性與安全性要求。因此算力平臺和軟件架構是實現自動泊車必不可少的一部分。
雖然自動泊車屬于低速場景,但如果操作失誤仍可能引發碰撞或人身傷害,因此自動泊車設計必須遵循《道路車輛功能安全》ISO 26262等功能安全標準,應具備故障檢測、冗余策略與安全降級機制。比如當視覺傳感器失效時,系統應能切換至超聲波與雷達的感知結果,或提示用戶盡快接管。當然,網絡安全對于自動泊車也不容忽視,遠程喚車與控制接口需實施嚴格的身份驗證與數據加密,防范未授權訪問與惡意攻擊,從而避免未知風險。
自動泊車想真正應用到實際場景,一定需要經過充足的測試。仿真平臺能覆蓋大量邊界場景,加速算法迭代,但無法完全替代實車測試。想測試真實停車場中的標線磨損、泥沙覆蓋、光線變化等復雜因素,仍需通過封閉場地與開放路測進行驗證。因此可以將仿真、封閉場地測試和公開道路試駕結合起來,形成閉環驗證流程。像是定位精度、泊入成功率、平均作業時間、異常處置耗時等系統的性能指標也應明確,這些量化結果是判斷系統是否具備上線條件的重要依據。
用戶想使用自動泊車功能,一般會通過中控屏或手機APP發起泊車或喚車指令,此時系統應提供直觀的狀態反饋與必要的接管提示。可視化界面能夠將車輛的定位與規劃路徑實時展示給用戶,幫助理解系統決策與行為。良好的人機交互能有效增強用戶信任,減少不必要的干預。

最后的話
自動泊車這一簡單的操作,并非依賴某一項傳感器或算法就能實現,而是需要感知、定位、地圖、規劃、控制、系統工程、功能安全、網絡安全、場端支持、測試驗證以及法規合規等多方面的支持,每一環節都至關重要。作為現階段用戶體驗非常多的一個功能,自動泊車的大規模應用也反應出自動駕駛技術的提升。
審核編輯 黃宇
-
自動駕駛
+關注
關注
794文章
14938瀏覽量
180783
發布評論請先 登錄
光伏運維云平臺的建設需要哪些技術支撐?



光庭信息與為旌科技自動泊車PoC項目通過主機廠驗收
超越“無線”:詳解無人機無線充電技術如何重塑行業自動化圖景
新能源汽車自動泊車超聲波傳感器鋁電解電容供電穩定

米爾RK3576核心板,讓360環視技術開發更簡單
360環視技術推薦的硬件平臺:支持多攝像頭與三屏異顯的理想選擇
【資料獲取】ADAS自動泊車輔助系統測試方法詳解

比亞迪推L4級智能泊車!企業兜底,技術碾壓競對?
自動駕駛是為了“增強人”,還是為了“替代人”?
廣汽傳祺聯合華為首次實現出發層泊車代駕技術試點
自動駕駛技術落地前為什么要先測試?
如何選擇適合機床的絲桿支撐座型號?




 工商網監
工商網監
評論