") 智駕仿真測(cè)試實(shí)戰(zhàn)之自動(dòng)泊車(chē)HiL仿真測(cè)試
智駕仿真測(cè)試實(shí)戰(zhàn)之自動(dòng)泊車(chē)HiL仿真測(cè)試

作者 | 了屋哦駱
小編 | 不吃豬頭肉
 引言
引言
汽車(chē)進(jìn)入智能化時(shí)代,自動(dòng)泊車(chē)功能已成為標(biāo)配。在研發(fā)測(cè)試階段,實(shí)車(chē)測(cè)試面臨測(cè)試場(chǎng)景覆蓋度不足、效率低下和成本高昂等挑戰(zhàn)。為解決這些問(wèn)題,本文提出一種自動(dòng)泊車(chē)HiL仿真測(cè)試系統(tǒng)方案,可大幅度提升測(cè)試效率及測(cè)試場(chǎng)景覆蓋度、縮短測(cè)試周期、加速產(chǎn)品迭代升級(jí)。

自動(dòng)泊車(chē)系統(tǒng)簡(jiǎn)介
多傳感器融合的自動(dòng)泊車(chē)技術(shù)結(jié)合了超聲波雷達(dá)和攝像頭來(lái)實(shí)現(xiàn)車(chē)位探測(cè)和環(huán)境感知。超聲波雷達(dá)通過(guò)實(shí)時(shí)探測(cè)周?chē)系K物的距離,結(jié)合車(chē)輛自身的長(zhǎng)寬,判斷是否存在可泊入的空間車(chē)位,而攝像頭則通過(guò)實(shí)時(shí)圖像識(shí)別來(lái)檢測(cè)劃線車(chē)位及其周?chē)h(huán)境。傳感器的協(xié)同工作使自動(dòng)泊車(chē)系統(tǒng)能夠精確識(shí)別車(chē)位、實(shí)現(xiàn)精準(zhǔn)停車(chē),并確保停車(chē)過(guò)程中的安全性。

自動(dòng)泊車(chē)HiL仿真測(cè)試系統(tǒng)
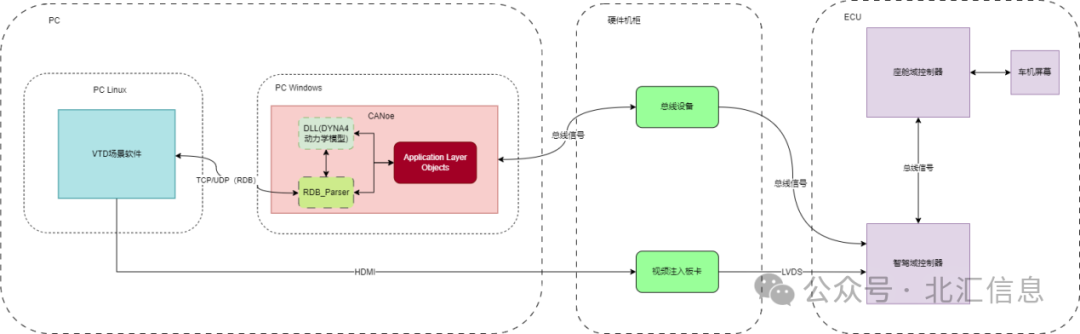
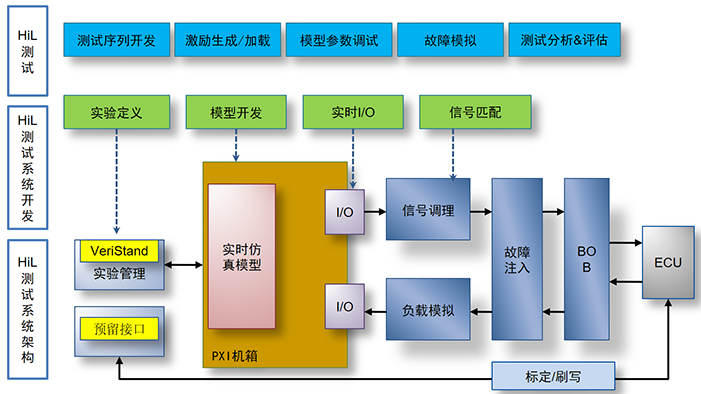
圖2 自動(dòng)泊車(chē) HiL測(cè)試系統(tǒng)框圖
自動(dòng)泊車(chē)HiL仿真測(cè)試系統(tǒng)框架如上圖2所示,結(jié)合場(chǎng)景仿真軟件(VTD)、動(dòng)力學(xué)仿真軟件(DYNA4)、實(shí)驗(yàn)管理軟件(CANoe)和HiL硬件平臺(tái),進(jìn)行整車(chē)通信網(wǎng)絡(luò)仿真、4路環(huán)視攝像頭仿真和12路超聲波雷達(dá)仿真,實(shí)現(xiàn)自動(dòng)泊車(chē)功能的閉環(huán)測(cè)試。
3.1整車(chē)通信網(wǎng)絡(luò)仿真
使用CANoe對(duì)智駕域控制器交互系統(tǒng)進(jìn)行虛擬節(jié)點(diǎn)仿真,如轉(zhuǎn)向系統(tǒng)、制動(dòng)系統(tǒng)、組合慣導(dǎo)INS、駕駛員操作指令等。
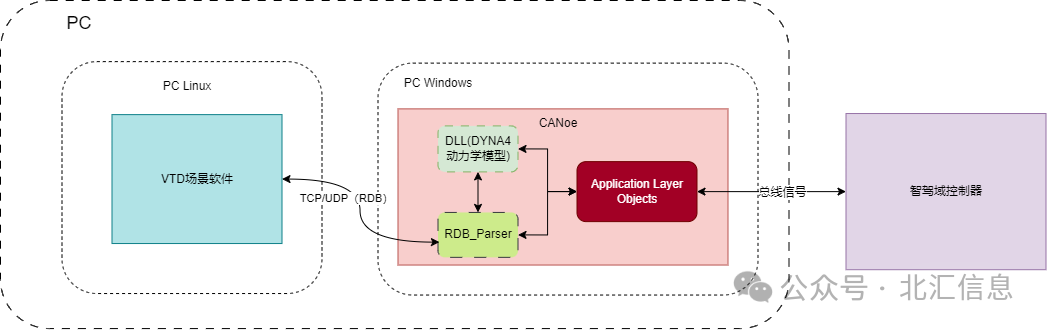
圖3 整車(chē)通信網(wǎng)絡(luò)數(shù)據(jù)流程圖
轉(zhuǎn)向、制動(dòng)系統(tǒng)等車(chē)輛實(shí)時(shí)運(yùn)動(dòng)狀態(tài)信號(hào):DYNA4模型輸出輪速、車(chē)速、方向盤(pán)轉(zhuǎn)角、檔位信號(hào)等,CANoe做邏輯處理后與總線信號(hào)(如CAN FD、SOME/IP、DDS)映射;同時(shí)CANoe解析并處理智駕控制器發(fā)出的總線信號(hào)(如CAN FD、SOME/IP、DDS),映射到DYNA4模型實(shí)現(xiàn)車(chē)輛運(yùn)動(dòng)控制;
組合慣導(dǎo)INS:VTD輸出UTM坐標(biāo),CANoe中進(jìn)行加偏處理,即UTM坐標(biāo)系->WGS84坐標(biāo)系->GCJ02坐標(biāo)系后映射到總線信號(hào)(如CAN FD、SOME/IP、DDS);
駕駛員車(chē)機(jī)操作信號(hào):如選擇車(chē)位、泊出方向選擇等。
3.2環(huán)視攝像頭仿真
針對(duì)4路環(huán)視攝像頭,使用視頻注入的方式進(jìn)行圖像數(shù)據(jù)仿真,如下所示:
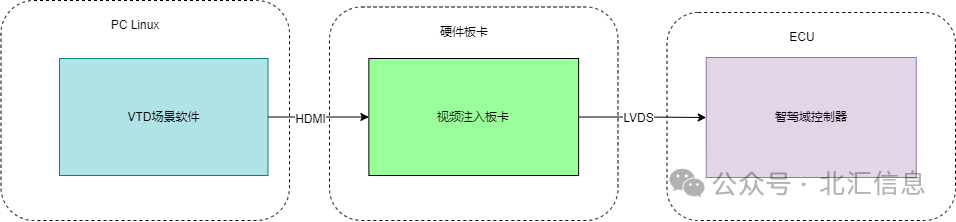
圖4 環(huán)視視頻注入數(shù)據(jù)流程圖
在場(chǎng)景仿真軟件VTD配置文件simServer.xml中新增一個(gè)IG視圖;
在IG視圖配置文件IGbase.xml對(duì)新建視圖畫(huà)面進(jìn)行畸變配置設(shè)置畫(huà)面FOV;
通過(guò)CfgDisplay.xml配置文件確定攝像頭安裝位置及偏轉(zhuǎn)方向,并分配對(duì)應(yīng)的GPU通道進(jìn)行圖像渲染。
3.3超聲波雷達(dá)仿真
針對(duì)12路超聲波雷達(dá)仿真,在場(chǎng)景仿真軟件VTD中配置OptiX 物理傳感器模型,數(shù)據(jù)傳輸如圖5所示:
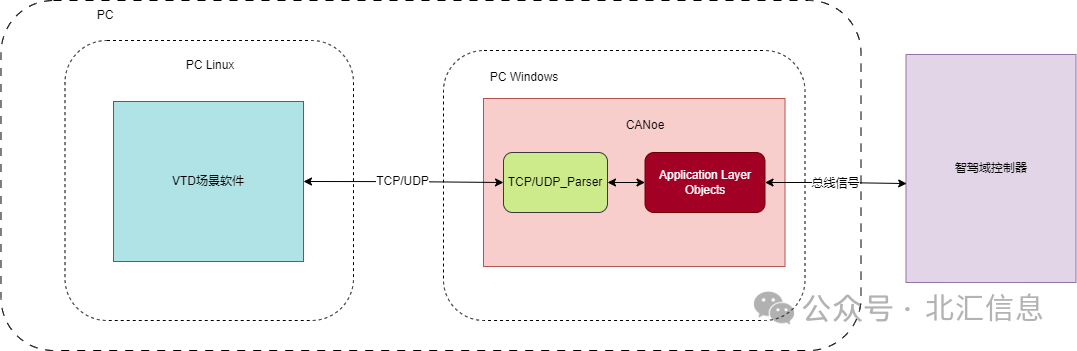
圖5 超聲波雷達(dá)仿真數(shù)據(jù)流程圖
在場(chǎng)景仿真軟件VTD配置文件simServer.xml中新增一個(gè)IG視圖,并配置讀取OptiX 物理傳感器模型配置文件;
在配置文件IGbase.xml中修改配置,設(shè)置橫向縱向發(fā)射的光線數(shù)量和數(shù)據(jù)存儲(chǔ)的共享內(nèi)存地址,輸出障礙物距離(distance)及物體表面被光追探測(cè)到的坐標(biāo)連線信息(cluster);
轉(zhuǎn)發(fā)程序配置,編寫(xiě)轉(zhuǎn)發(fā)程序讀取共享內(nèi)存中的數(shù)據(jù),剔除無(wú)效數(shù)據(jù),將傳感器光追探測(cè)到的障礙物最小距離(distance)和障礙物表面每列最小坐標(biāo)連線(cluster)通過(guò)TCP/UDP發(fā)送至實(shí)驗(yàn)管理軟件CANoe;
在實(shí)驗(yàn)管理軟件CANoe中使用CAPL進(jìn)行數(shù)據(jù)處理,處理后的數(shù)據(jù)通過(guò)總線信號(hào)(如CAN FD、SOME/IP、DDS)發(fā)送至智駕域控制器中。
 案例展示4.1環(huán)視攝像頭視頻注入標(biāo)定效果
案例展示4.1環(huán)視攝像頭視頻注入標(biāo)定效果
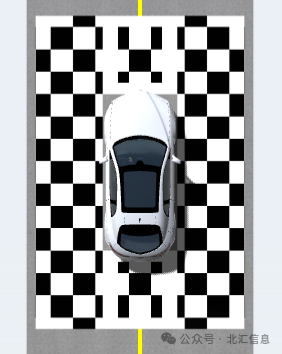
圖6 VTD標(biāo)定場(chǎng)景IG圖
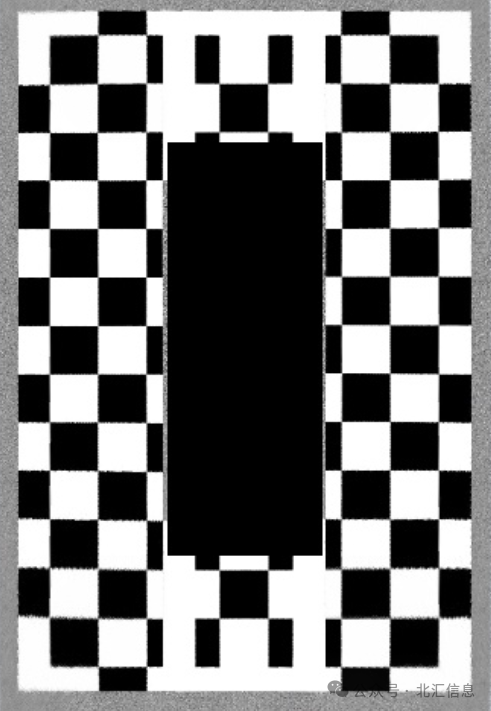
圖7 4路環(huán)視融合(全景)圖
4.2超聲波雷達(dá)仿真效果
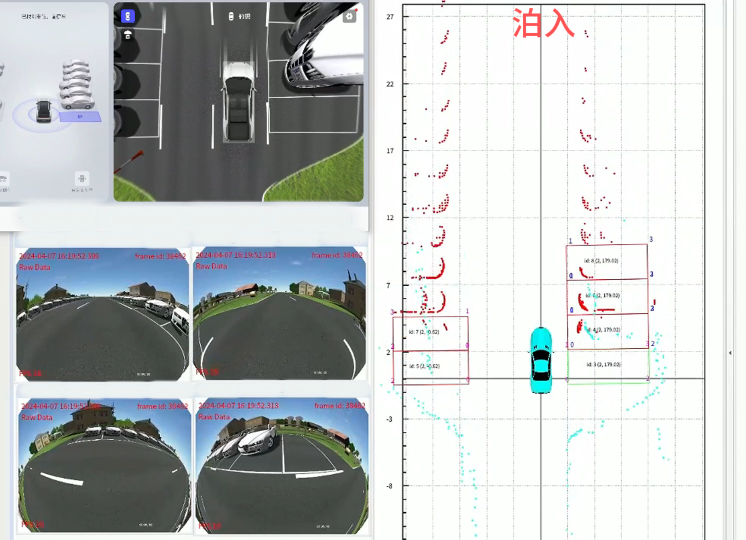
如下圖9所示,將車(chē)身四周劃分為1-16共16個(gè)扇區(qū),其中FRS_6、RRS_7、RLS_14、FLS_15四個(gè)扇區(qū)為虛擬扇區(qū),其數(shù)據(jù)值通過(guò)DR坐標(biāo)系及鄰近扇區(qū)推理算出,車(chē)頭、車(chē)尾和右側(cè)淡藍(lán)色弧線為超聲波雷達(dá)探測(cè)到障礙物形成的Cluster連線,扇區(qū)中的值為超聲波雷達(dá)安裝位置到障礙物的最近距離值,扇區(qū)無(wú)障礙物時(shí)默認(rèn)值為5100。
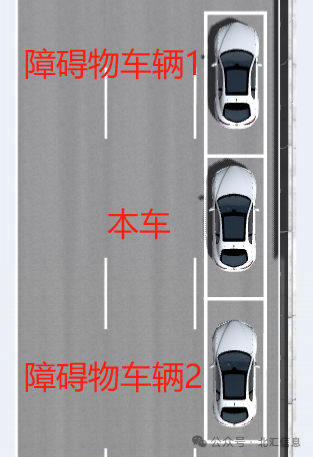
圖8 VTD泊出IG圖
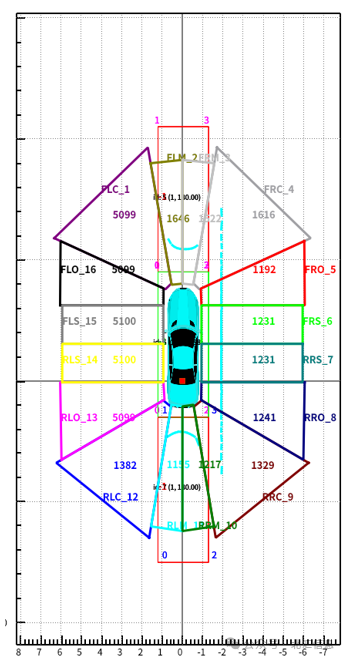
圖9 超聲波雷達(dá)扇區(qū)信息圖
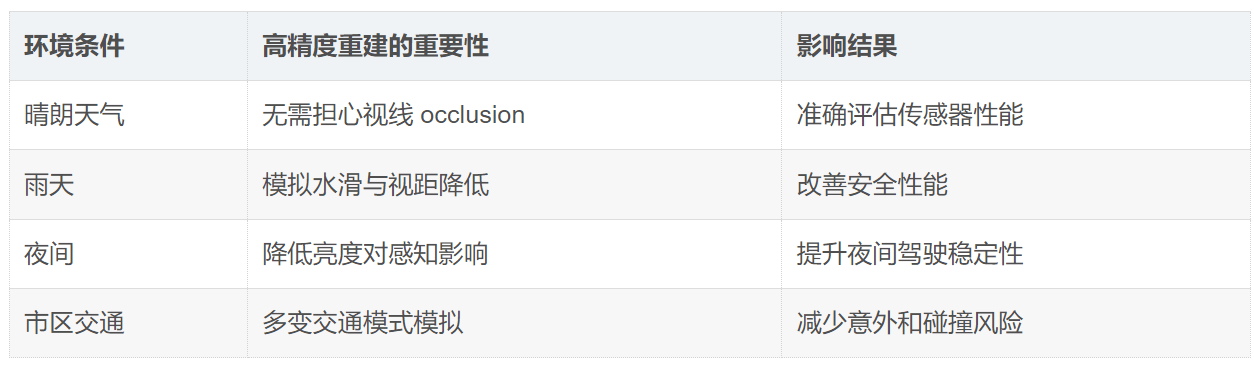
本系統(tǒng)能夠模擬復(fù)雜的泊車(chē)場(chǎng)景和環(huán)境因素,包括不同類(lèi)型的停車(chē)位(如平行、垂直、斜向)以及各種位置和距離的停車(chē)位。同時(shí),模擬了多種障礙物,如錐形桶、地鎖、騎行者等,以確保自動(dòng)泊車(chē)系統(tǒng)能夠準(zhǔn)確識(shí)別不同測(cè)試場(chǎng)景下的不同類(lèi)型障礙物。允許團(tuán)隊(duì)評(píng)估自動(dòng)泊車(chē)系統(tǒng)在繁忙停車(chē)場(chǎng)中的性能表現(xiàn),并測(cè)試在不同天氣條件(如晴天、雨天、雪天)、光照情況和道路狀況下的準(zhǔn)確性、響應(yīng)速度及穩(wěn)定性。

總結(jié)
借助這套自動(dòng)泊車(chē) HiL仿真測(cè)試系統(tǒng),可快速構(gòu)建車(chē)輛及環(huán)境模型,從而模擬車(chē)輛在各種情境下的泊車(chē)狀態(tài)。同時(shí)彌補(bǔ)實(shí)車(chē)測(cè)試場(chǎng)景覆蓋度低、成本高等痛點(diǎn),提高自動(dòng)泊車(chē)功能測(cè)試驗(yàn)證效率。北匯信息在智能駕駛MiL/SiL/HiL/ViL測(cè)試中擁有諸多成功的方案與實(shí)施經(jīng)驗(yàn),在持續(xù)的項(xiàng)目開(kāi)發(fā)中,北匯信息也致力于新方案的技術(shù)驗(yàn)證與實(shí)施,為中國(guó)智能網(wǎng)聯(lián)汽車(chē)發(fā)展貢獻(xiàn)自己的力量。
-
HIL
+關(guān)注
關(guān)注
2文章
74瀏覽量
18276 -
仿真測(cè)試
+關(guān)注
關(guān)注
0文章
115瀏覽量
11792 -
自動(dòng)泊車(chē)
+關(guān)注
關(guān)注
0文章
106瀏覽量
14344
發(fā)布評(píng)論請(qǐng)先 登錄
智駕仿真測(cè)試實(shí)戰(zhàn)之自動(dòng)泊車(chē)HiL仿真測(cè)試---泊入泊出#ADAS #自動(dòng)駕駛 #VTHiL
自動(dòng)泊車(chē)HiL仿真測(cè)試介紹#自動(dòng)泊車(chē) #VTHiL
硬件在環(huán)(HIL)測(cè)試系統(tǒng)架構(gòu)
MCU硬件在環(huán)(HiL)仿真測(cè)試系統(tǒng)組成
新能源汽車(chē)控制器HiL仿真測(cè)試,系統(tǒng)構(gòu)架是怎樣的
探究HIL硬件在環(huán)測(cè)試
【干貨分享】硬件在環(huán)仿真(HiL)測(cè)試

設(shè)計(jì)仿真 基于VTD的AR-HUD仿真測(cè)試解決方案

基于V2X和自動(dòng)駕駛HIL聯(lián)調(diào)的仿真測(cè)試系統(tǒng)開(kāi)發(fā)

汽車(chē)HiL測(cè)試:利用TS-GNSS模擬器掌握硬件性能的仿真藝術(shù)
智能駕駛HIL仿真測(cè)試解決方案

底盤(pán)電控系統(tǒng)HIL仿真測(cè)試解決方案

智能座艙HIL仿真測(cè)試解決方案

如何選擇適合的智駕仿真工具進(jìn)行場(chǎng)景生成和測(cè)試?
邁向智駕高階驗(yàn)證:康謀高保真HIL仿真解決方案,重塑測(cè)試價(jià)值




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論