 電子發燒友App
電子發燒友App



隨著無人機技術日新月異,無人機以其低成本、高效率、易操作的特點迅速出現在了各行各業中廣泛應用。
但由于全天候、全天時的任務,導致無人機在氣象條件復雜、能見度低的環境下安全事故頻發,保證飛行安全已成為無人機行業的熱門問題。
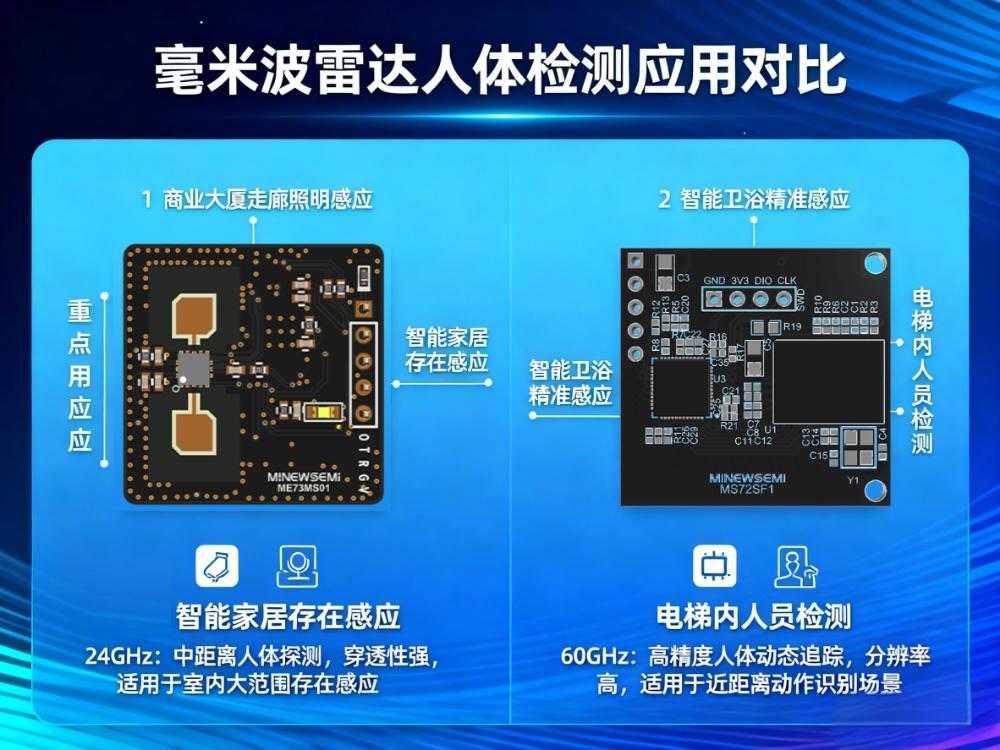
無人機避障毫米波雷達傳感器,針對無人機在惡劣環境下能見度受限、感知退化的問題,通過對雷達傳感器融合技術,實現了場景的動態感知。
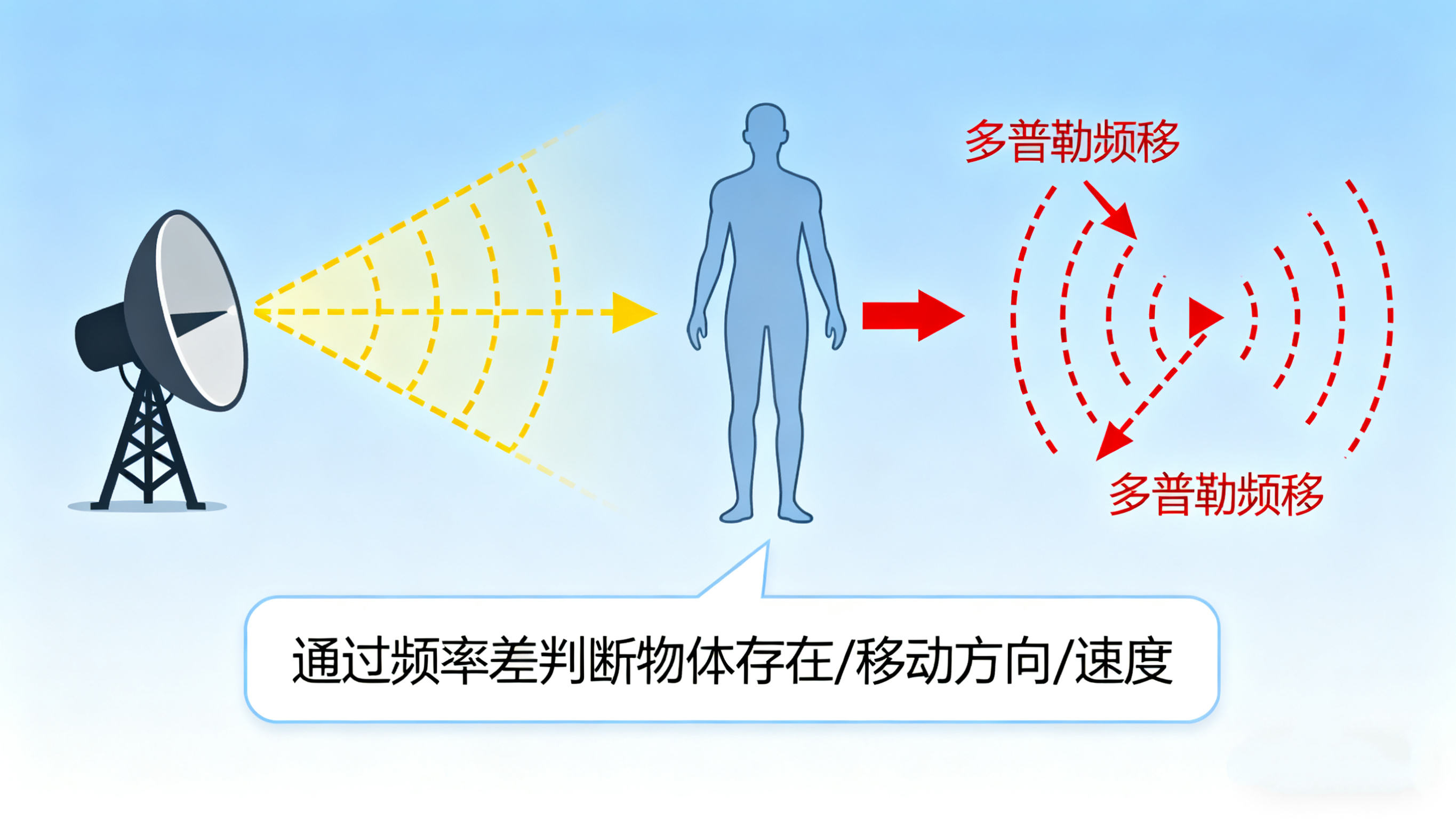
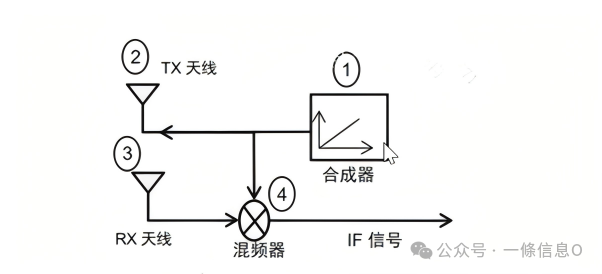
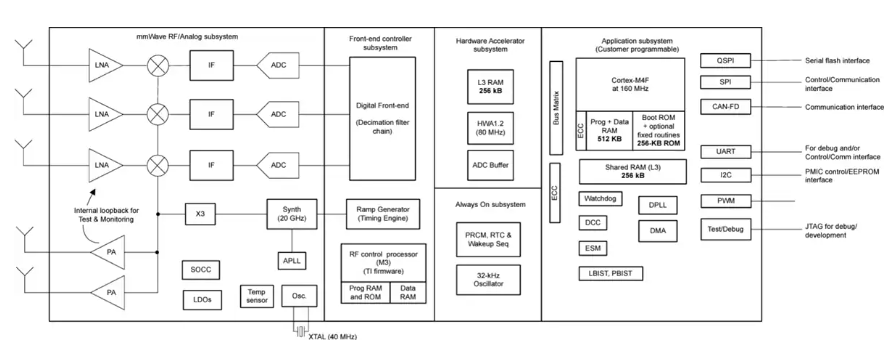
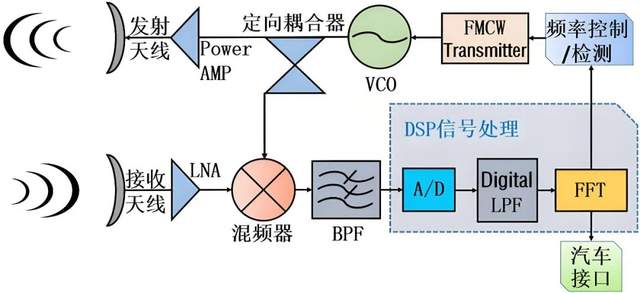
雷達傳感器基于多普勒效應,感應距離靈活可調,采用成熟CMOS工藝,單芯片集成,超高性價比,具有自校準功能,不受外部干擾影響。性能強大,可做豐富算法,拓展性強,適合高性能要求的場景。
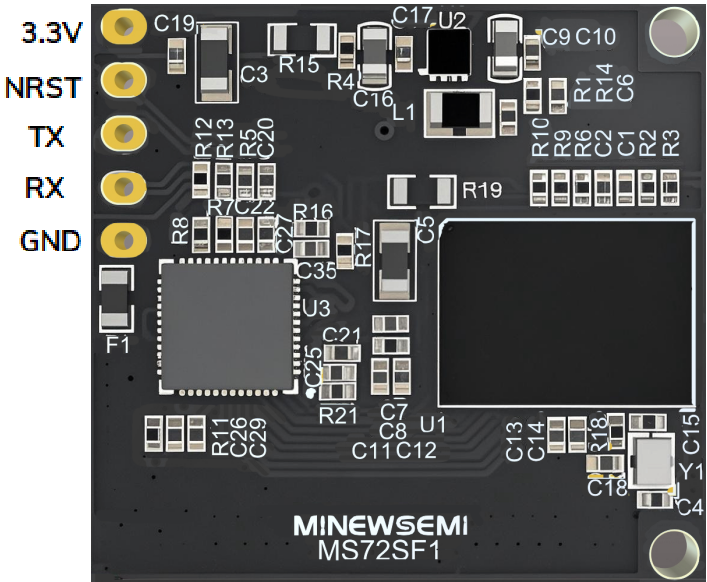
支持標準UART接口,可與其他主控或傳感器互聯互通,也可作為主控使用,實現存在感應。
通過對障礙物凸顯與目標檢測技術的研究實現了場景的理解,通過對三維渲染引擎技術的結合實現了可視化過程,輔以多種關鍵性技術達到了全天候、全天時、全地形條件下飛行任務的無障礙執行。
先根據無人機飛行過程中可能面臨的復雜場景進行了研究,建立了多套具有復雜環境特征的地形數據和地物數據。
然后對全地形條件設計了雨、雪、霧、沙塵、揚塵、積雪、晝夜特征的退化視覺環境,并使用著色器渲染技術模擬了前視紅外、激光雷達和毫米波雷達的成像特征,實現多傳感器對退化視覺場景的感知能力。
根據無人機對地拍攝目標成像尺寸小的特征,研究了小目標檢測的關鍵問題,并專注于應用領域目標樣本數量少的特征,使用三維渲染引擎技術,設計了用于樣本生成的樣本生成器。
然后使用多種數據增強技術對原始樣本進行增強,以增強網絡模型的泛化能力。使用多種技術手段,合理控制并優化訓練進程,實現模型的高效訓練。
無人機避障毫米波雷達傳感器具有極強的穿透能力,可穿透大雨、大雪、強沙塵等惡劣天氣全氣候工作的特點。為無人機操作員提供了一個具有多傳感器融合感知、威脅地形告警、威脅障礙物凸顯、且具有輔助飛行能力的系統。
二維電子地圖、路徑預規劃、安全飛行通道、著陸地標、自動巡航等輔助駕駛技術,通過信息技術的高度集成,實現無人機的半自主飛行,減輕了無人機操作人員的工作負荷。
通過對毫米波雷達傳感器與視覺技術進行優勢互補,實現了對無人機操作員全天候、全天時、全地形的全場景環境感知能力,繼而為危險地形、障礙物的及時規避提供了足夠的時間,從而提高飛行過程中的安全系數。
通過引入目標檢測技術,實現了場景信息的主動檢測、標示、凸顯,加快了場景的理解效果,避免了無人機操作員用于場景識別的額外負擔,使得操作員可以將更多的精力放到決策層上,確保了任務執行的高效性。
毫米波雷達傳感器具有極強的穿透能力具有全天候、全氣候工作的特點的特性,增強空間態勢感知能力。
? ? ? ? ymf










































 工商網監
工商網監
評論