") 智能駕駛的“感官系統(tǒng)”:超聲波雷達、毫米波雷達與激光雷達的協(xié)同之道
智能駕駛的“感官系統(tǒng)”:超聲波雷達、毫米波雷達與激光雷達的協(xié)同之道

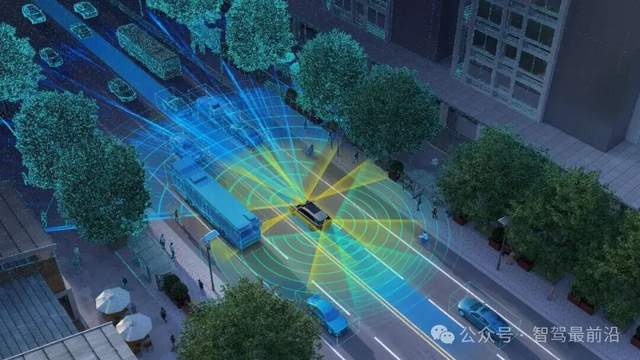
在智能駕駛技術飛速發(fā)展的今天,汽車已不再是單純的交通工具,而是具備感知、決策與執(zhí)行能力的“移動智能體”。要實現(xiàn)自動駕駛,車輛必須像人類一樣“看”清周圍環(huán)境。然而,人類依靠雙眼和大腦,而智能汽車則依賴一套復雜的傳感器系統(tǒng)——其中,超聲波雷達、毫米波雷達和激光雷達構(gòu)成了智能駕駛的“感官三重奏”,各司其職、協(xié)同工作,共同構(gòu)建車輛對環(huán)境的全面認知。
超聲波雷達:最“接地氣”的近距離守護者
工作原理:
超聲波雷達利用壓電材料發(fā)射和接收超聲波(頻率高于20kHz,人耳不可聽),通過測量聲波從發(fā)射到反射回接收器的時間,計算障礙物距離。其工作方式類似于蝙蝠的回聲定位。
核心作用:
短距離探測:有效探測距離一般為0.2–3米,適用于極近距離感知。
低速場景主導:主要用于泊車輔助(APA)、自動泊車(AVP)、盲區(qū)監(jiān)測等低速或靜態(tài)場景。
成本低廉:單顆成本僅數(shù)十元,易于大規(guī)模部署。
典型應用:
倒車雷達:車輛倒車時,后保險杠的4–6個超聲波雷達實時監(jiān)測后方障礙物,通過蜂鳴聲提示距離。
自動泊車:系統(tǒng)通過前后雷達掃描車位,判斷空間是否足夠,并控制方向盤、油門、剎車完成泊入。
低速防碰撞:在擁堵路段,當車輛接近前車或側(cè)方障礙物時,系統(tǒng)自動剎車或提醒駕駛員。
優(yōu)勢與局限:
? 優(yōu)點:成本低、體積小、安裝靈活、對靜止物體敏感。
? 缺點:探測距離短、易受環(huán)境干擾(如雨雪、灰塵)、無法識別物體類型(僅知距離)。
形象比喻:超聲波雷達如同“觸覺”,幫助車輛“感知”緊貼車身的障礙,是智能駕駛的“貼身保鏢”。
毫米波雷達:全天候的“中距離哨兵”
工作原理:
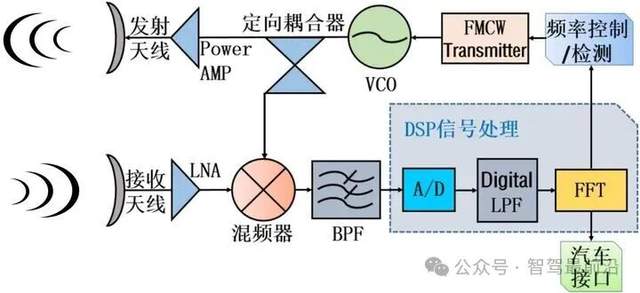
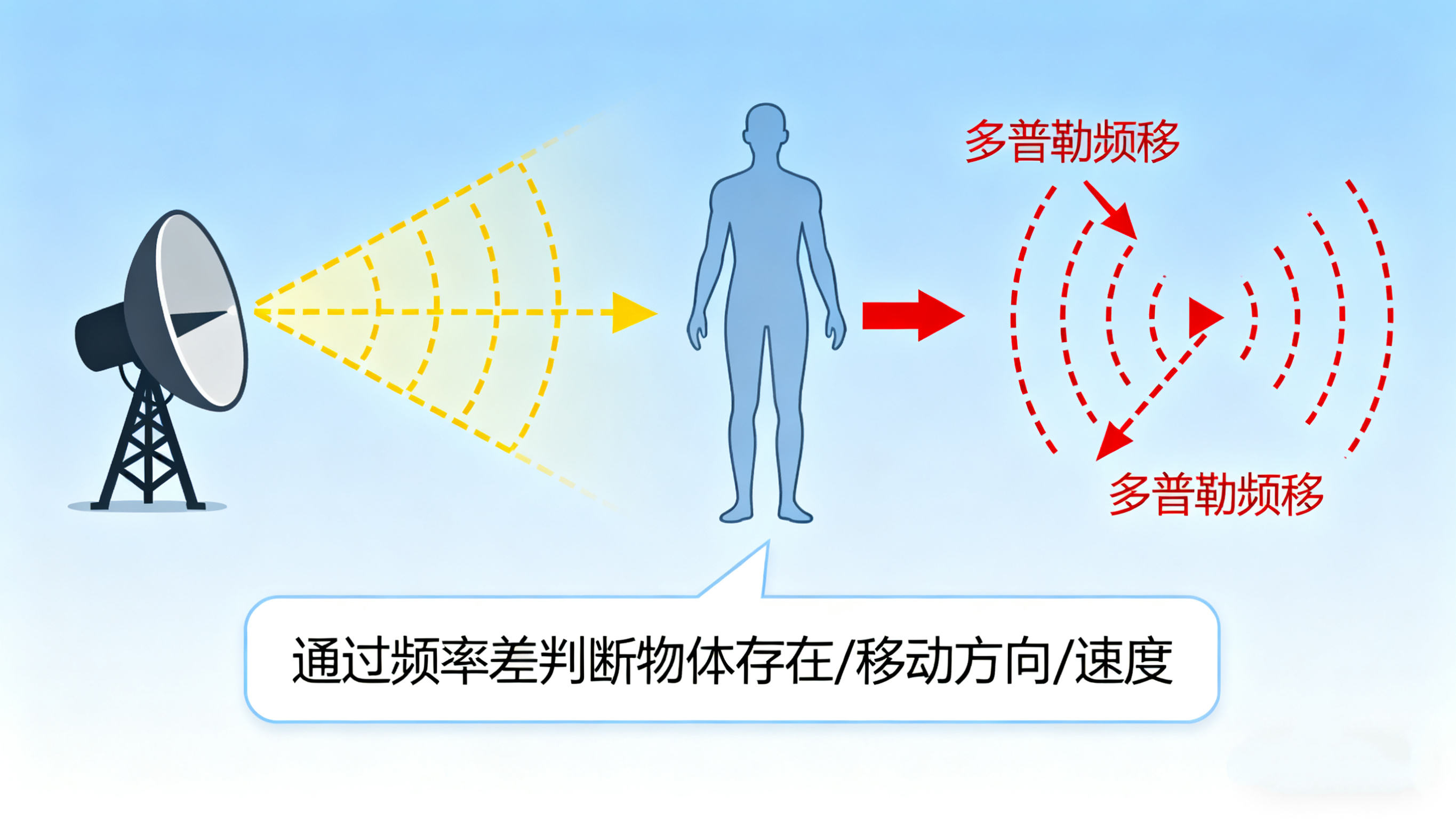
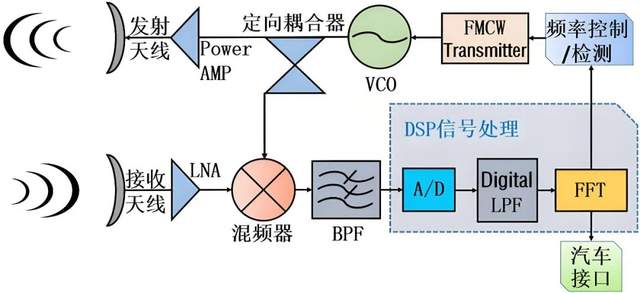
毫米波雷達發(fā)射毫米波(頻率30–300GHz,波長1–10mm),通過多普勒效應和相位差測量目標的距離、速度和角度。常見頻段為24GHz(短距)和77GHz(中長距)。
核心作用:
中距離探測:探測距離可達150–250米,適用于高速行駛場景。
速度測量精準:可直接測量目標相對速度,誤差小于0.1m/s。
全天候工作:不受雨、雪、霧、灰塵影響,穿透力強。
典型應用:
自適應巡航(ACC):前向毫米波雷達持續(xù)監(jiān)測前車距離與速度,自動調(diào)整車速保持安全車距。
自動緊急制動(AEB):當系統(tǒng)判斷即將碰撞且駕駛員未反應時,自動觸發(fā)剎車。
盲點監(jiān)測(BSD):側(cè)后方雷達檢測變道時的盲區(qū)車輛,發(fā)出警示。
變道輔助(LCA):結(jié)合前向與側(cè)向雷達,判斷變道安全性。
優(yōu)勢與局限:
? 優(yōu)點:探測距離遠、測速精準、全天候可靠、成本適中(數(shù)百元至千元)。
? 缺點:分辨率較低,難以識別小物體或復雜形狀(如行人、自行車),易受金屬反射干擾。
形象比喻:毫米波雷達如同“聽覺”,能“聽見”遠處車輛的動靜,是智能駕駛的“全天候哨兵”。
激光雷達:高精度的“視覺之眼”
工作原理:
激光雷達(LiDAR)發(fā)射激光束(通常為905nm或1550nm波長),通過接收反射光的時間差(Time of Flight, ToF)或相位差,構(gòu)建高精度的三維點云地圖。其分辨率可達厘米級。
核心作用:
高精度建模:生成環(huán)境的3D點云圖,精確識別物體形狀、輪廓與位置。
遠距離探測:探測距離可達200–500米,部分高端產(chǎn)品達1000米。
復雜場景識別:可區(qū)分行人、車輛、護欄、樹木等,支持高階自動駕駛決策。
典型應用:
高階自動駕駛(L3+):作為核心傳感器,為決策系統(tǒng)提供精確環(huán)境模型。
高精地圖匹配:將實時點云與預存地圖比對,實現(xiàn)厘米級定位。
復雜路口通行:識別非機動車、行人突然橫穿等“鬼探頭”場景。
城市NOA(導航輔助駕駛):在復雜城區(qū)道路中實現(xiàn)變道、繞行、避障。
優(yōu)勢與局限:
? 優(yōu)點:分辨率極高、探測精度高、可構(gòu)建3D環(huán)境模型。
? 缺點:成本高昂(早期數(shù)萬美元,現(xiàn)降至千元級)、受雨雪霧影響大、功耗較高。
形象比喻:激光雷達如同“視覺”,能“看清”世界的細節(jié),是智能駕駛的“火眼金睛”。
三者協(xié)同:構(gòu)建全場景感知能力
單一傳感器無法應對所有駕駛場景,因此智能汽車采用多傳感器融合策略,發(fā)揮各自優(yōu)勢:
技術趨勢與未來展望
成本持續(xù)下降:
激光雷達價格從數(shù)萬美元降至千元級,2025年有望進入“百元時代”,推動L3級自動駕駛普及。
固態(tài)與Flash技術:
傳統(tǒng)機械旋轉(zhuǎn)式激光雷達正被固態(tài)激光雷達取代,體積更小、可靠性更高。Flash激光雷達可一次性發(fā)射面陣激光,實現(xiàn)“快照式”掃描。
4D毫米波雷達興起:
新一代毫米波雷達增加“高度”維度,可探測物體高度(如路牌、橋洞),并生成點云,性能接近激光雷達,成本更低。
傳感器前融合:
未來將從“數(shù)據(jù)后融合”轉(zhuǎn)向“前融合”,即在原始數(shù)據(jù)層面融合多傳感器信息,提升決策實時性與準確性。
車路協(xié)同補充:
通過V2X通信,車輛可獲取路側(cè)雷達、攝像頭數(shù)據(jù),彌補單車感知盲區(qū),實現(xiàn)“上帝視角”。
沒有“最好”,只有“最合適”
超聲波雷達、毫米波雷達、激光雷達并非相互替代,而是互補共存。它們共同構(gòu)成了智能駕駛的“感官系統(tǒng)”:
超聲波雷達是“觸覺”,守護低速安全;
毫米波雷達是“聽覺”,保障高速穩(wěn)定;
激光雷達是“視覺”,實現(xiàn)高階智能。
未來,隨著人工智能、5G-V2X、高精地圖等技術的融合,這套“感官系統(tǒng)”將更加智能、高效,推動自動駕駛從“輔助”走向“自主”,最終實現(xiàn)安全、便捷、綠色的智慧出行愿景。正如一位工程師所言:“自動駕駛不是靠一個傳感器,而是靠一套‘器官’的協(xié)同進化。”
審核編輯 黃宇
-
智能駕駛
+關注
關注
5文章
3021瀏覽量
51333 -
毫米波雷達
+關注
關注
109文章
1164瀏覽量
66326 -
超聲波雷達
+關注
關注
1文章
78瀏覽量
4856
發(fā)布評論請先 登錄
固態(tài)激光雷達參數(shù)以及避障視頻
雨霧天下毫米波雷達與激光雷達誰更具優(yōu)勢?
如何克服毫米波雷達點云稀疏問題?

雨霧天氣,毫米波雷達表現(xiàn)為什么比激光雷達更好?
4D毫米波雷達為什么稱為激光雷達的“替身”?
自動駕駛中毫米波雷達到底有何作用?

微波雷達和毫米波雷達有什么區(qū)別
自動駕駛里的激光雷達有何作用?

【干貨】一文帶你讀懂什么是毫米波雷達,了解毫米波雷達如何成為融合感知的關鍵一環(huán)

自動駕駛中超聲波雷達、激光雷達、毫米波雷達有何區(qū)別?

納芯微:為什么超聲波雷達是車載感知的近距離守護者?
毫米波雷達在自動駕駛中有何關鍵作用?
自動駕駛毫米波雷達之間會相互干擾嗎?

多毫米波雷達的實車連續(xù)測量應用案例
ADAS和防撞系統(tǒng)中的毫米波雷達方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論