") 自動駕駛中毫米波雷達(dá)到底有何作用?
自動駕駛中毫米波雷達(dá)到底有何作用?

[首發(fā)于智駕最前沿微信公眾號]自動駕駛汽車為了能夠更好地勘測到交通環(huán)境,需要多個感知硬件協(xié)同工作,由于各感知硬件的功能不同,在自動駕駛行業(yè)中被討論的熱度也不一樣,攝像頭與激光雷達(dá)作為主要的感知硬件,一直是行業(yè)討論的熱點,而毫米波雷達(dá)、超聲波雷達(dá)等感知硬件,更像是一個配角,成為自動駕駛技術(shù)實現(xiàn)的輔助硬件。那在自動駕駛中毫米波雷達(dá)到底有何作用?
毫米波雷達(dá)是什么?
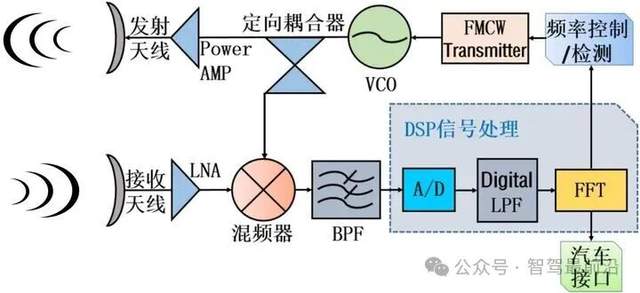
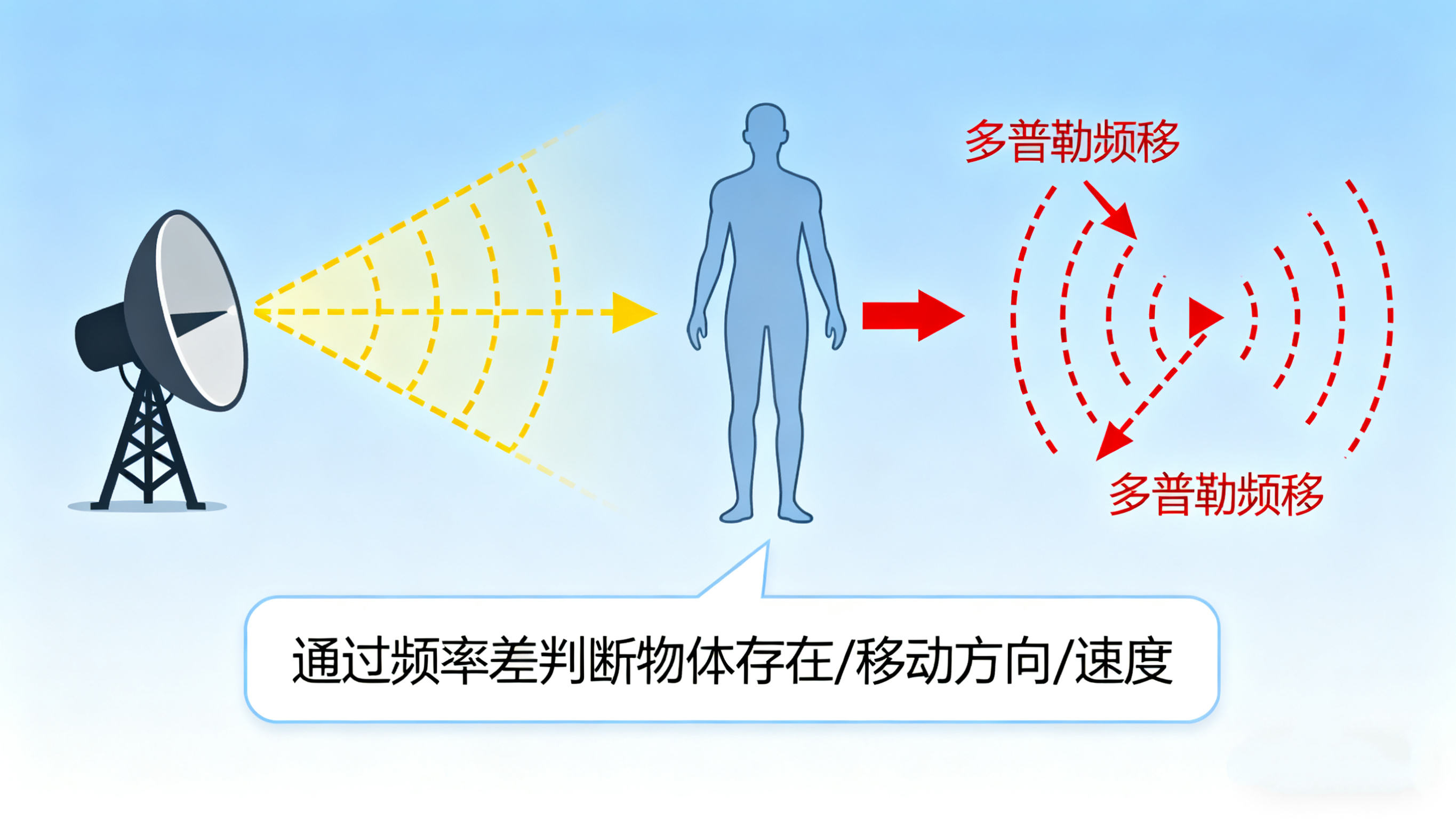
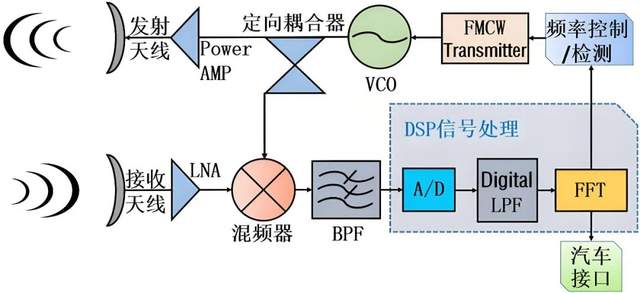
毫米波雷達(dá),顧名思義是一種用毫米級波長的無線電波去“看”路面周圍事物的傳感器,汽車?yán)锍R姷墓ぷ黝l段主要是以24GHz(過去),以及現(xiàn)在主流的77–79GHz為主。雷達(dá)發(fā)射一串受控的電磁波(工程上常用的是連續(xù)波調(diào)頻——FMCW,俗稱“啁啾”信號),當(dāng)波遇到物體反射回來后,雷達(dá)把回波和發(fā)射信號做頻率差、相位差和時間差的處理,換成可讀的數(shù)據(jù),目標(biāo)的距離、相對速度(靠多普勒頻移)以及朝向(靠天線陣列的相位差或多天線合成)等信息都能被估算出來。這套從發(fā)射到數(shù)字信號處理再到最終輸出的鏈條,決定了雷達(dá)在檢測距離、速度精度和抗惡劣天氣能力上有天然優(yōu)勢。
那它是怎么測出距離和速度?簡而言之,毫米波雷達(dá)就是把頻率從低到高勻速掃一圈,這就是一段啁啾(chirp)。回波回來的時候,雷達(dá)接收到的信號在頻率上和當(dāng)前發(fā)射的信號存在差別,這個“差頻”正比于往返傳播時間,從而換算成距離;如果目標(biāo)在移動,反射波的頻率還會因為多普勒效應(yīng)整體偏移,這個偏移又直接給出徑向速度(相對于雷達(dá)的速度分量)。把很多個啁啾放在一起、并結(jié)合天線的空間布局(多發(fā)或多收),雷達(dá)可以通過傅里葉變換把時間/頻率信息變成距離軸、速度軸,再結(jié)合陣列信號處理估計角度,最后形成基于距離-角度-速度的三維信息圖(有時稱為“4D雷達(dá)”或“成像雷達(dá)”的原始數(shù)據(jù))。很多智能汽車?yán)走_(dá)已經(jīng)實現(xiàn)了在單芯片上完成射頻到數(shù)字的緊密集成,這讓雷達(dá)既便宜又小巧。

毫米波雷達(dá)工作示意圖,圖片源自:網(wǎng)絡(luò)
那毫米波雷達(dá)產(chǎn)出的到底是什么樣的數(shù)據(jù)?它不像激光雷達(dá)給你一張密集的點云,也不像攝像頭給你一張有色的照片。傳統(tǒng)的毫米波雷達(dá)更像是給出許多“熱斑”或“回波簇”,每個回波攜帶距離、徑向速度和回波強度,有時候還能通過相位信息估計入射角。早期的雷達(dá)輸出是離散的目標(biāo)列表(track),而現(xiàn)在有的成像雷達(dá)會輸出類似熱力圖或稠密的深度-速度圖,但總體上分辨率(尤其是方位分辨率、跨距分辨率)仍然不如激光雷達(dá)。毫米波雷達(dá)還會有一類特殊輸出叫“微多普勒(micro-Doppler)”,它能反映目標(biāo)內(nèi)部的振動或轉(zhuǎn)動特征,比如行人的擺臂、車輪的旋轉(zhuǎn)等信息,這對區(qū)分目標(biāo)類型非常有幫助。
毫米波雷達(dá)的距離分辨率和可用帶寬直接相關(guān),帶寬越寬、能把近鄰目標(biāo)分離得越清楚;短波長(高頻)則有利于做更小、更高角度分辨能力的天線陣列。因此產(chǎn)業(yè)上從過去的24GHz逐步遷移到77/79GHz,是因為77GHz帶來更寬的許可帶寬,從而提升距離分辨力并允許更緊湊的天線陣列布局(車上更易集成多路收發(fā)天線以實現(xiàn)高角分辨率)。許多主流半導(dǎo)體廠商都把77–79GHz作為主力產(chǎn)品線,車規(guī)級單芯片雷達(dá)也相繼推出,推動了雷達(dá)在汽車?yán)锏钠占啊?/p>
毫米波雷達(dá)的角色及優(yōu)劣勢?
把雷達(dá)放到自動駕駛行業(yè)中,它主要扮演哪些角色?其最基礎(chǔ)的功能就是做距離與速度的“守門員”,被應(yīng)用在自適應(yīng)巡航、盲區(qū)監(jiān)測、并線輔助和碰撞預(yù)警這些場景,毫米波雷達(dá)能夠直接并可靠地給出前車或側(cè)后方車輛的相對速度和距離,尤其在雨、雪、霧、夜間這些視覺受損場景里表現(xiàn)穩(wěn)定。毫米波雷達(dá)還有更高級的應(yīng)用,那就是通過陣列和先進(jìn)處理(如MIMO合成大孔徑、時頻域成像、相位補償?shù)龋┌逊直媛释蟼鳎a(chǎn)生可以支持目標(biāo)分類和姿態(tài)估計的更豐富表征。這就是為什么近幾年人們開始講“成像雷達(dá)”或“4D雷達(dá)”的原因,其目的就是試圖把雷達(dá)從一個粗粒度的運動傳感器,變成能參與語義感知的傳感器之一。
緊急避讓,圖片源自:網(wǎng)絡(luò)
那雷達(dá)的優(yōu)勢到底在哪兒?抗惡劣天氣能力是它的殺手锏。電磁波在毫米波段穿透雨雪和部分塵土的能力強于可見光,激光雷達(dá)和攝像頭在大雨大雪、塵暴、逆光或夜間都會顯著退化,而毫米波雷達(dá)通常還能穩(wěn)定工作。此外,毫米波雷達(dá)能“原生”給出速度(多普勒)信息,這是攝像頭單獨難以做到的(雖然光學(xué)光流能估速度,但受遮擋和紋理影響很大)。毫米波雷達(dá)的成本也相對友好、壽命長、易于隱藏和保護(hù)(可以裝在保險杠背后),這些都是量產(chǎn)車很在意的工程屬性。
既然毫米波雷達(dá)有這么多優(yōu)勢,為何在自動駕駛感知硬件中一直處于第二梯隊?其實毫米波雷達(dá)的短板也很明顯并且決定了它不太可能單獨完成所有自動駕駛感知任務(wù),其核心問題在于分辨率和語義能力。毫米波雷達(dá)的波長和可用帶寬決定了它的角分辨率和距離分辨率,傳統(tǒng)雷達(dá)在區(qū)分相鄰小目標(biāo)(比如一個倒在路中央的小塑料袋和小型石塊)時能力會明顯不足。毫米波雷達(dá)的反射強度受目標(biāo)材質(zhì)、形狀和入射角影響也很大,塑料、布料等弱反射體往往難以被檢測;而激光雷達(dá)能給出更稠密和更直觀的幾何點云,攝像頭則提供豐富的顏色和紋理信息,便于語義理解(行人、交通標(biāo)志、路緣石、車道線等)。再者,毫米波雷達(dá)的多徑和鬼影(multipath、side-lobe)問題會帶來假目標(biāo),如果沒有足夠高階的信號/算法處理,易誤報或漏報。綜合起來,就是“雷達(dá)很會測距離和速度,但不太會講故事(語義)”。
毫米波雷達(dá)可以替代激光雷達(dá)嗎?
聊到這里,也自然會把我們引向一個行業(yè)爭論的核心話題,雷達(dá)能不能替代激光雷達(dá)?其實這個話題之前單獨和大家聊過(相關(guān)閱讀:都是點云數(shù)據(jù),毫米波雷達(dá)能否替代激光雷達(dá)?),這里再和大家簡單聊聊。先說答案,那就是“目前看不太可能完全替代”。更準(zhǔn)確的表述是“雷達(dá)正在變得越來越像激光雷達(dá)(分辨率和成像能力提升),但兩者的物理特性決定了它們各有擅長的領(lǐng)域,短時間內(nèi)更現(xiàn)實的路徑是傳感器融合而不是單一替代”。在很多產(chǎn)品和路測中,有些技術(shù)方案的做法就是把攝像頭、雷達(dá)和激光雷達(dá)結(jié)合起來,互補各自的短板。以Waymo、Cruise這類做Robotaxi的公司為例,它們在不同代次的車輛上同時采用激光雷達(dá)和雷達(dá),再用大量的攝像頭作為語義判別的主力,展示了多傳感器融合在極端場景下提高魯棒性的價值;而像Tesla這樣強調(diào)“純視覺+雷達(dá)(或純視覺)”路線的玩家則認(rèn)為軟件和大規(guī)模數(shù)據(jù)標(biāo)注可以彌補硬件差距,行業(yè)對此仍然存在激烈爭議與分歧。
圖片源自:網(wǎng)絡(luò)
既然雷達(dá)不能完全代替激光雷達(dá),那“成像雷達(dá)”技術(shù)能不能把差距縮小到足夠的程度,使系統(tǒng)只用雷達(dá)+攝像頭就能達(dá)到類似激光雷達(dá)的表現(xiàn)?通過MIMO(多輸入多輸出)天線、稀疏重建、Dopplerbeamsharpening、合成孔徑雷達(dá)(SAR)思想以及深度學(xué)習(xí)驅(qū)動的后處理,其實可以把傳統(tǒng)雷達(dá)從“只有幾個目標(biāo)輸出”逐步推進(jìn)到“能夠輸出更稠密的角度-距離圖像”。最近幾年的論文與產(chǎn)業(yè)預(yù)研顯示,采用更復(fù)雜的時空信號處理和更寬的帶寬,可以顯著提升橫向分辨力與旁瓣抑制,這使雷達(dá)在特定場景下能看到之前看不清的細(xì)節(jié),同時微多普勒等信息也為分類提供了新的線索。不過這些方案對計算資源、算法魯棒性和標(biāo)注數(shù)據(jù)量提出了更高要求,且在極端復(fù)雜場景(例如遮擋、低反射小物體)下仍然面臨挑戰(zhàn)。
從工程實現(xiàn)角度說,成像雷達(dá)要達(dá)到激光雷達(dá)那種在空間結(jié)構(gòu)上“顯式還原環(huán)境”的能力,會涉及三方面的瓶頸。一是硬件,要更寬的帶寬、更密的天線陣列和更高線性度的射頻鏈路;二是信號處理與算法,要處理海量的原始回波,做更精準(zhǔn)的相位校正、運動校準(zhǔn)與波束成形;三是數(shù)據(jù)與驗證,需要大量現(xiàn)實世界下不同天氣、不同路況的數(shù)據(jù)來訓(xùn)練和驗證模型以避免邊界崩潰。雖然有少數(shù)廠商的demo實現(xiàn)了很大進(jìn)展,但把這一套做到量產(chǎn)、車規(guī)、低功耗、低成本,并在數(shù)百萬輛車上穩(wěn)定運行,依然是工程上很大的挑戰(zhàn)。
毫米波雷達(dá)的未來發(fā)展趨勢
從產(chǎn)業(yè)趨勢來看,毫米波雷達(dá)有幾個比較清晰的方向,一是頻段與帶寬的規(guī)范化向77/79GHz聚攏,行業(yè)主流器件生態(tài)在這個頻段已經(jīng)成熟;二是硬件的集成度越來越高,射頻前端、AD/DA和DSP在單芯片或緊湊的模塊內(nèi)完成,成本和體積下降;三是MIMO、波束成形和多頻多模設(shè)計成為提升角分辨率的常態(tài)化手段;四是軟件定義雷達(dá)(SDR)和更靈活的波形設(shè)計開始被重視,以應(yīng)對多傳感器電磁共存和抗干擾要求;五是雷達(dá)與其他傳感器的深度融合成為量產(chǎn)路線,這一點在很多高階自動駕駛公司與傳統(tǒng)Tier1廠商的戰(zhàn)略里都能看到。
圖片源自:網(wǎng)絡(luò)
那對于產(chǎn)品工程師與系統(tǒng)設(shè)計師來說,面對毫米波雷達(dá)技術(shù)突飛猛進(jìn)的局面,應(yīng)該怎么取舍與設(shè)計傳感器棧?智駕最前沿給出一些自己的見解,可以把雷達(dá)的功能定位為“穩(wěn)定的運動與危險預(yù)警層”,在低可見度或高相對速度場景下?lián)沃髁Γ瑫r用攝像頭做語義判別(識別行人、交通標(biāo)志、車道線),激光雷達(dá)用于在復(fù)雜幾何場景、精細(xì)定位與稠密地圖構(gòu)建時補足雷達(dá)的短板。對于成本敏感的乘用車平臺,廠商會權(quán)衡激光雷達(dá)的使用(目前高性能激光雷達(dá)成本仍然偏高),可以嘗試選擇更強的成像雷達(dá)+攝像頭作為替代方案;而對于需要極高安全裕度和冗余的純自動駕駛車隊或機器人出租車,短期內(nèi)還是建議保留激光雷達(dá)以獲得更可靠的幾何感知。傳感器的選型必須和公司對自動駕駛能力的定位、任務(wù)邊界和可接受的風(fēng)險模型相匹配。
最后的話
毫米波雷達(dá)是自動駕駛感知系統(tǒng)里極其重要的基礎(chǔ)傳感器,它以穩(wěn)定的距離和速度測量、優(yōu)秀的惡劣天氣魯棒性和量產(chǎn)友好的工程特性為系統(tǒng)提供“骨架式”的空間感知;成像雷達(dá)與算法進(jìn)步正在縮小它與激光雷達(dá)在分辨率和語義能力上的差距,但兩種傳感器的物理特性仍然互補,短期內(nèi)更現(xiàn)實的路徑是“融合而非替代”。
-
自動駕駛
+關(guān)注
關(guān)注
794文章
14930瀏覽量
180665 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
109文章
1164瀏覽量
66326
發(fā)布評論請先 登錄
雨霧天下毫米波雷達(dá)與激光雷達(dá)誰更具優(yōu)勢?
4D毫米波雷達(dá)是如何識別高度信息的?

如何克服毫米波雷達(dá)點云稀疏問題?

雨霧天氣,毫米波雷達(dá)表現(xiàn)為什么比激光雷達(dá)更好?
自動駕駛中4D毫米波雷達(dá)在雨霧中更具優(yōu)勢嗎?

看不見的引擎:毫米波雷達(dá)線圈如何驅(qū)動自動駕駛
微波雷達(dá)和毫米波雷達(dá)有什么區(qū)別
自動駕駛里的激光雷達(dá)有何作用?

4D毫米波雷達(dá)比3D毫米波雷達(dá)到底強在哪兒?

自動駕駛中超聲波雷達(dá)、激光雷達(dá)、毫米波雷達(dá)有何區(qū)別?


泰克示波器TBS1102C在毫米波雷達(dá)研發(fā)中的關(guān)鍵測試方案

毫米波雷達(dá)在自動駕駛中有何關(guān)鍵作用?
自動駕駛毫米波雷達(dá)之間會相互干擾嗎?

ADAS和防撞系統(tǒng)中的毫米波雷達(dá)方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論