 車載毫米波雷達的工作原理和功能
車載毫米波雷達的工作原理和功能

來源:一條信息0
毫米波的應用
毫米波(mmWave)嚴格意義上是指波長在1到10毫米之間、頻率范圍是30GHz-300GHz的電磁波。
一般而言,毫米波的界定并不十分確切,通常認為毫米波頻率范圍為24-300GHz。
毫米波技術在通信、雷達、制導、遙感技術、射電天文學、臨床醫學和波譜學等領域都有應用。
雷達的發展歷程
世界上第一部實用化的雷達就是由那位發明蒸氣機的詹姆斯·瓦特的后代、英國科學家羅伯特·沃森·瓦特爵士1936年研制成功。
第二次世界大戰期間,納粹德國在損失飛機1977架、飛行員2585人的情況下,仍無法取得英吉利海峽的制空權優勢,更無法借由空襲瓦解英國的地面和海軍戰力,不得不放棄入侵英國的“海獅計劃”,德國戰車的進攻、贏得不列顛空戰,除了“噴火”和“颶風”這樣的明星戰機發揮巨大作用外,還有一個幕后大功臣—被稱為“本土鏈”(ChainHome)的對空雷達。
為盡可能早的對納粹飛機進行預警,1936年5月英國空軍決定在本土大規模部署這種雷達,也就是“本土鏈”雷達的雛形,到1939年初,共有20個雷達站投入使用。在納粹德國“海獅計劃”實施前,英國已建成了2道雷達探測網,共51座雷達站。這些雷達為抵御德國空軍的空襲做出了重要貢獻,從此開啟了后續毫米波雷達在各個領域廣泛應用的八十年。
車載雷達的產生
80年代初期,美國著名大學、研究機構以及幾百家企業逐步開始投入毫米波雷技術研究,毫米波雷達技術進入高速發展期。80年代中期,歐洲制定“高效和空前安全的歐洲交通計劃”(Program for European Traffic with Highest Efficiency and Unprecedented afety : PROME THEUS),全面指導和引發了歐洲、日本等汽車大國的雷達技術研究和發展。
1995年,三菱汽車在Diamante上面首次使用了“車前距離控制”系統(Preview Distance Control),不過這套系統只能算是自適應巡航的早期版本,因為它只是通過控制油門以及降擋來降低車速,自身并不會干預剎車。1999年,奔馳在S級(W220)上面首次應用了真正的自適應巡航系統,叫做Distronic(限距控制系統)。
車載毫米波雷達的分類
常見的車載毫米波雷達可根據工作頻段分為24GHz、60GHz、77GHz毫米波雷達。準確來說24GHz雷達應該劃分為厘米波雷達。
24GHz
近距雷達,成本低,尺寸大,探測精度較差。因此在駕駛輔助功能發展的前期被廣泛應用,主要用在換道輔助,盲區檢測等功能上。
60GHz
遠距雷達,成本較高,尺寸小,探測精度較高,約為24GHz雷達的3倍。但隨著芯片成本的市場化,成本也得到了有效的降低,前期主要應用在前向行車功能(ACC等)中,目前已逐步取代24GHz雷達。
77GHz
活體檢測雷達,成本較高,尺寸小,探測精度較高。主要應用在車內后排活體檢測、心跳檢測等。
車載雷達的工作原理
雷達系統發射的電磁波信號被其發射路徑上的物體阻擋繼而會發生反射。通過捕捉反射的信號,雷達系統可以確定物體的距離、速度和角度。
目前主流市場應用的多為FMCW(調頻連續波)毫米波雷達。
FMCW雷達系統所用信號的頻率隨時間變化呈線性升高。這種類型的信號也稱為線性調頻脈沖。
FMCW雷達系統發射線性調頻脈沖信號,并捕捉其發射路徑中的物體反射的信號。圖所示為FMCW雷達主射頻組件的簡化框圖。該雷達的工作原理如下:
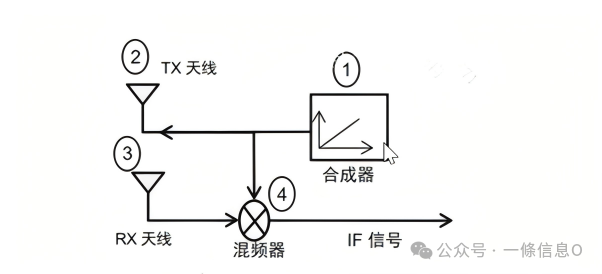
合成器生成一個線性調頻脈沖。
該線性調頻脈沖由發射天線(TX天線)發射。
物體對該線性調頻脈沖的反射生成一個由接收天線(RX天線)捕捉的反射線性調頻脈沖。
“混頻器”將RX和TX信號合并到一起,生成一個中頻(IF)信號。混頻器是一個電子組件,將兩個信號合并到一起生成一個具有新頻率的信號。
汽車毫米雷達波的安裝
毫米波雷達一般安裝在車輛的四角保杠以及前牌照板下方,或者前中網附近,毫米波可以穿透TPO(PP+EPDM)塑料的前后保來實現探測,有隱藏式的,也有開放式的。
汽車毫米波雷達的功能
車載毫米波雷達產品包括前視中距毫米波雷達(MRR)、側視近距毫米波雷達(SRR)和車內人員檢測毫米波雷達(VODR) 。
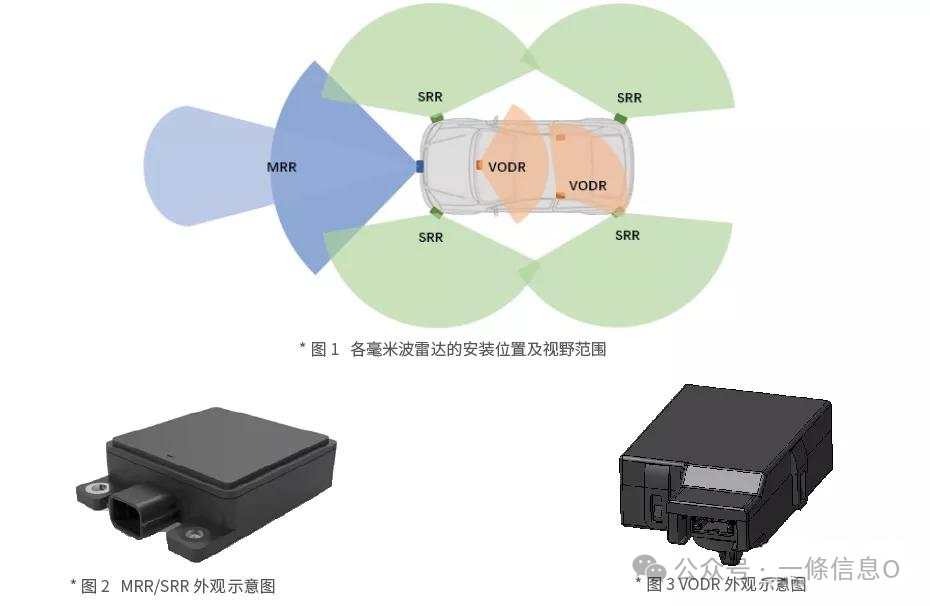
MRR安裝于車身正前方,能夠對目標區域內的障礙物進行檢測與參數測量、跟蹤以及目標類型識別,可用于支撐L2及L2以上級別自動駕駛系統的FCW(前向碰撞預警)、AEB(主動緊急制動)、ACC等功能。
SRR安裝于車身四角,能夠對目標區域內的障礙物進行檢測與參數測量、跟蹤以及目標類型識別,主要用于支撐L2及L2以上級別自動駕駛系統的BSD(盲點監測)、LCDA(換道輔助)、RCTA(后方橫向來車預警)、RCW(后防撞預警)、DOW(開門防撞預警)、FCTA(前方橫向來車碰撞預警)等功能。
VODR安裝于車內B柱頂端或后視鏡下方,目的在于當駕駛人員離開并鎖車后,能夠對車內環境進行自動檢測,若檢測出車內有人員遺留可以通過聲光報警或遠程報警等方式及時發出警告以提示車主。
4D毫米波雷達
4D成像毫米波雷達的概念最早在2015年被提出。為什么叫4D ?傳統雷達可以測距、測速、測角,但不能測高。4D成像雷達具備測高功能。能夠提供目標的高度信息。
4D成像雷達具備更高的角度分辨率、更遠的探測距離、更強的成像能力、更高的俯仰分辨能力、更強的目標分類能力,可以更好的實現多目標跟蹤、弱勢群體檢測、360°環境感知、輔助高清地圖構建等功能。
-
雷達
+關注
關注
52文章
3349瀏覽量
124168 -
車載雷達
+關注
關注
0文章
41瀏覽量
13874 -
毫米波
+關注
關注
21文章
2045瀏覽量
67918
原文標題:毫米波雷達基礎知識
文章出處:【微信號:深圳市賽姆烯金科技有限公司,微信公眾號:深圳市賽姆烯金科技有限公司】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄



 工商網監
工商網監
評論