") 自動駕駛中4D毫米波雷達在雨霧中更具優(yōu)勢嗎?
自動駕駛中4D毫米波雷達在雨霧中更具優(yōu)勢嗎?

[首發(fā)于智駕最前沿微信公眾號]最近有一位小伙伴留言:假設一個智駕場景,大霧的夜晚,在激光雷達和攝像頭的成像效果被削弱的情況下,依靠4D毫米波雷達的數(shù)據(jù)反饋還能維持智駕嗎?在這種情況下增加不同原理的傳感器是目前最優(yōu)解決方案嗎?其實這個場景是自動駕駛在現(xiàn)實環(huán)境中非常典型,也是非常棘手的邊緣場景。對于4D毫米波雷達來說,這個場景的應用到底會如何?

為什么4D毫米波雷達在霧夜環(huán)境下表現(xiàn)會更好?
在“霧+夜+光線差+能見度低”的環(huán)境下,攝像頭依賴光線,在夜里+霧中圖像可能模糊、對比差、細節(jié)缺失;激光雷達(尤其某些類型)也可能受到霧、雨、雪、水滴、雪花、粉塵等散射、反射、吸收的影響,導致點云質量下降,因此傳統(tǒng)以視覺(攝像頭)+激光雷達為主的感知方案表現(xiàn)反而不會很好。
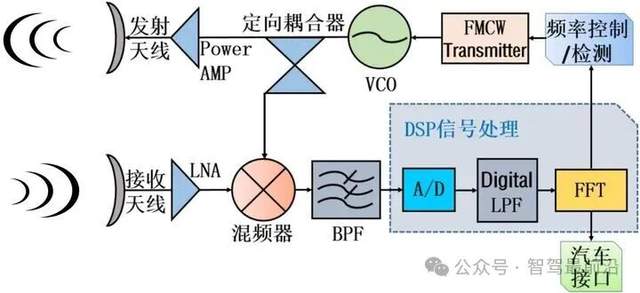
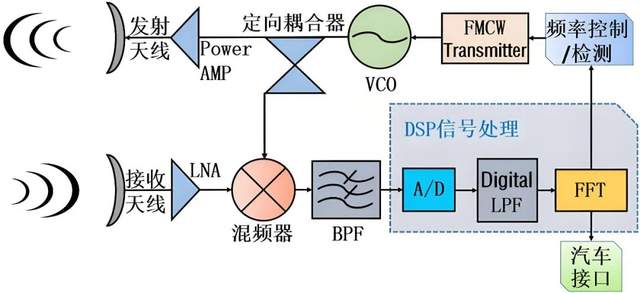
相比之下,毫米波雷達的波長更長,對雨、霧、灰塵、水滴等的穿透性較強,不容易受到光照和能見度的影響。尤其是4D毫米波雷達,即便在霧、夜等低能見度條件下,仍能有效探測周圍物體,因此被視為一種“全天候/全時段”的感知傳感器。

毫米波雷達系統(tǒng)原理,圖片源自:網(wǎng)絡
相較于傳統(tǒng)毫米波雷達,4D毫米波雷達還具有顯著的功能提升。它不僅能夠測量距離、速度和方位角,還能獲取仰角(即高度/俯仰角)信息。這意味著其探測能力不再局限于平面內的粗略感知,而是具備了立體(3D+高度)感知、較好的分辨率以及一定的成像能力。
因此,在霧夜等低能見度場景下,僅靠攝像頭與激光雷達(LiDAR)的組合難以實現(xiàn)可靠感知。而加入4D毫米波雷達,則能有效彌補上述傳感器的不足,進而將自動駕駛系統(tǒng)的感知能力延伸至對各類目標的探測、檢測、持續(xù)跟蹤、精確測速與測距,形成關鍵的能力互補。

為什么4D毫米波雷達沒有普及?
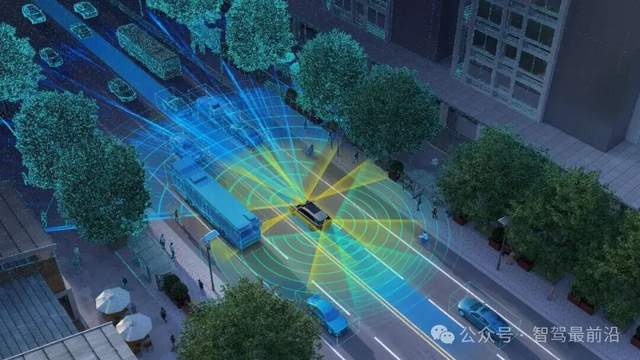
4D毫米波雷達的確可以完善自動駕駛的感知能力,但為什么現(xiàn)在提到自動駕駛時,更多人想到的感知硬件還是攝像頭或者激光雷達?為什么4D毫米波雷達提出來了那么多年,還沒有得到大面積的應用?更沒有成為主要的感知硬件?

圖片源自:網(wǎng)絡
1)點云稀疏&分辨率/細節(jié)有限
即便是4D毫米波雷達,其點云數(shù)量/密度/分辨率與高線束、高分辨率的激光雷達相比,仍然有一定差距。像是在多車并道、小車距離很近、障礙物形態(tài)復雜(欄桿、路緣、交通錐、行人、小型電動車…)等復雜場景,4D毫米波雷達可能只能檢測到一個“點”或很少幾個反射點,難以準確判斷物體的形狀、邊界、尺寸、類別(是車、人、欄桿還是樹?)。如果只是這些信息將無法滿足規(guī)劃/決策的要求。
2)高度/形狀/類別判斷仍弱
雖然4D毫米波雷達可以獲得測仰角信息,從而提高對“高度”的分辨能力。但對于某些場景(如行人、騎車人、兒童、小動物、低矮障礙物、半遮擋物…)的識別和分類,還是不如激光雷達+攝像頭那樣清晰、語義豐富。尤其是對于靜止但形態(tài)復雜(例如擋在路邊半邊陰影/半擋住)的障礙物,4D毫米波雷達可以探測到距離/速度/角度信息,但無法明確判斷類別和具體邊界。
3)點云“噪聲+稀疏+不確定性”問題
雷達波反射可能因為地面、濕度、水滴、霧滴、建筑反射、地面鋪裝、其他車輛金屬結構、雨雪、環(huán)境雜散波干擾等產(chǎn)生噪聲,而4D毫米波雷達點云本來就比激光雷達稀疏,當遇到復雜/靜態(tài)/低反射目標(比如黑色物體、空氣中輕微霧滴、透明物體…)時可能根本沒有回波或回波太弱。這樣的不確定性使得僅靠4D毫米波雷達判斷路況顯得不夠可靠。
4)單一傳感器的冗余/容錯能力有限
自動駕駛要求非常高的安全性與可靠性。4D毫米波雷達如果作為唯一定感知來源,一旦它的波束被遮擋(比如前方有大型障礙物、復雜結構反射、地形起伏、相鄰金屬結構)、或者反射異常(濕滑地面、水/雪/霧/雨/霰/泥/塵)、或多輛車/多目標密集…那么即便有回波,也可能誤判、漏判、定位誤差。對于L4/L5級別的自動駕駛來說,這種不確定性風險太大,僅靠4D毫米波雷達是遠遠不夠的。

感知冗余才是最優(yōu)解?
沒有一種感知傳感器是萬能的,想真正做到在各種環(huán)境(晴/雨/霧/夜/隧道/混合光照/復雜交通)都安全可靠,最佳方案只有多傳感器組合+融合。這也是為什么現(xiàn)在很多自動駕駛/智能駕駛系統(tǒng)會同時裝攝像頭、激光雷達、毫米波雷達(特別是4D雷達)的原因。

圖片源自:網(wǎng)絡
甚至在某些設計中,系統(tǒng)會對不同傳感器結果進行可信度評估+模式切換/融合判斷,當視覺或激光雷達受損時,毫米波雷達占主導;當天氣好、光照佳、視線清晰時,攝像頭+激光雷達將提供高精度識別與細節(jié)。所有傳感器的數(shù)據(jù)融合后將可以給出更穩(wěn)健、冗余、高可信度的環(huán)境模型。
對于小伙伴一開始提到的霧夜這種感知困難環(huán)境里,增加不同原理的傳感器+做融合,確實是目前最現(xiàn)實、最可靠、最優(yōu)的解決方案。

融合就是最優(yōu)了嗎?
盡管多傳感器融合方案在當前階段為自動駕駛提供了不可或缺的感知保障,但我們仍需清醒認識到,融合是提升系統(tǒng)可靠性的必要手段,但并非充分條件。融合不是將多個感知硬件數(shù)據(jù)進行簡單的堆疊,而是要做到1+1>2的效果,否則會面臨非常多的問題。

圖片源自:網(wǎng)絡
1)算力+數(shù)據(jù)融合復雜性大
想將來自不同傳感器的數(shù)據(jù)進行有效融合,不僅需要強大的計算能力,融合算法也必須非常成熟,這其中會涉及非常多的關鍵環(huán)節(jié)。其中包括多源數(shù)據(jù)的時空同步、傳感器標定、坐標系統(tǒng)一、數(shù)據(jù)對齊,以及異質信息(如點云、圖像、雷達回波)的深度融合、各源數(shù)據(jù)可信度評估與異常處理等。對于需要實時響應的自動駕駛系統(tǒng)而言,這無疑對算力與軟件設計提供了非常高的要求。
2)融合后的校準/同步/冗余管理
想讓多傳感器融合發(fā)揮作用,各傳感器之間的空間關系(位置/姿態(tài)/標定/校準)、時間同步(不同采樣頻率/延遲/時延補償)、數(shù)據(jù)融合策略(權重/優(yōu)先級/置信度/冗余切換)等都需要非常嚴謹?shù)脑O計,并做好長期測試和維護。
3)邊緣場景并非不存在
多傳感器融合后,的確可以增加感知的準確性,但依舊會有諸如大霧、大雨、強側風、水霧、飛濺、反射、復雜地形、金屬結構、多目標混雜、強反射、遮擋、小物體(如跌落物、輪胎碎片、塑料袋、行人小動作)等邊緣場景,即使是多傳感器融合,也會存在感知盲區(qū)、誤檢測、漏檢測或延遲等反應。在某些情況下,感知硬件還會被干擾,導致感知失效,無法達到自動駕駛系統(tǒng)的要求。這也是現(xiàn)階段L3級及以上自動駕駛難以落地的原因。
4)成本/產(chǎn)業(yè)化/量產(chǎn)問題
加裝多個感知傳感器,將不可避免地帶來成本、系統(tǒng)復雜度、功耗及維護需求的提升。對于追求量產(chǎn)與商業(yè)落地的車企而言,這將對其整車的成本控制、長期可靠性、售后維護體系乃至產(chǎn)品壽命周期等提出更多的要求。也正因如此,現(xiàn)在很多車企對針對不同的市場人群,提供了不同的感知方案,以滿足更多消費者的需求。
因此,即便“多傳感器+融合”是目前最優(yōu)方案,也需要時間、技術、產(chǎn)業(yè)鏈、工程實踐來不斷優(yōu)化、驗證和完善。

最后的話
在大霧夜間,4D毫米波雷達應被視為感知的底座,它能在光學傳感失效時維持對距離、速度和大致高度的穩(wěn)定感知,但它本身無法提供足夠的語義與邊界精度來支持高級決策;因此正確的做法是把它作為冗余且必需的一環(huán),與激光雷達、攝像頭形成互補,同時在軟件層面要建立基于置信度的模態(tài)權重與退化策略、實時健康監(jiān)測與自動重標定機制,以及清晰的ODD(可操作域)和故障降級流程。只有把硬件互補性、融合算法、實時置信度管理和運營級的安全邊界四者同時做足,自動駕駛系統(tǒng)才能在霧夜這類極端情形下既“看得見”又“走得穩(wěn)”。
審核編輯 黃宇
-
自動駕駛
+關注
關注
794文章
14947瀏覽量
180997 -
毫米波雷達
+關注
關注
109文章
1169瀏覽量
66350
發(fā)布評論請先 登錄
自動駕駛毫米波雷達真的識別不到行人嗎?

雨霧天下毫米波雷達與激光雷達誰更具優(yōu)勢?
4D毫米波雷達是如何識別高度信息的?

德賽西威發(fā)布首款支持衛(wèi)星架構的8T8R 4D毫米波雷達
雨霧天氣,毫米波雷達表現(xiàn)為什么比激光雷達更好?
自動駕駛中毫米波雷達到底有何作用?

看不見的引擎:毫米波雷達線圈如何驅動自動駕駛
4D毫米波雷達比3D毫米波雷達到底強在哪兒?

恩智浦4D成像雷達如何助力自動駕駛發(fā)展
毫米波雷達在自動駕駛中有何關鍵作用?
自動駕駛毫米波雷達之間會相互干擾嗎?

多毫米波雷達的實車連續(xù)測量應用案例
4D毫米波雷達能取代激光雷達嗎?

黑芝麻智能視覺與4D毫米波雷達前融合算法介紹




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論