ROS-1645W-119+型號介紹 今天我要向大家介紹的是 Mini Circuits 的一款振蕩器——ROS-1645W-119+。 它的核心
2026-01-05 15:48:53
BMI270型號介紹 今天我要向大家介紹的是 Bosch 的一款運動傳感器——BMI270。 它集成了 3 軸加速度計和 3 軸陀螺儀。它通常
2026-01-05 11:20:34
疆鴻智能PROFIBUS集線器,驅動六軸機器人高效協同,打造汽車配件智慧產線 工廠背景:自動化孤島下的協同困境 某中型汽車線束配件制造車間內,三條產線并行運作,其中核心工序由六臺不同品牌的六軸機器人
2025-12-29 14:51:30 78
78 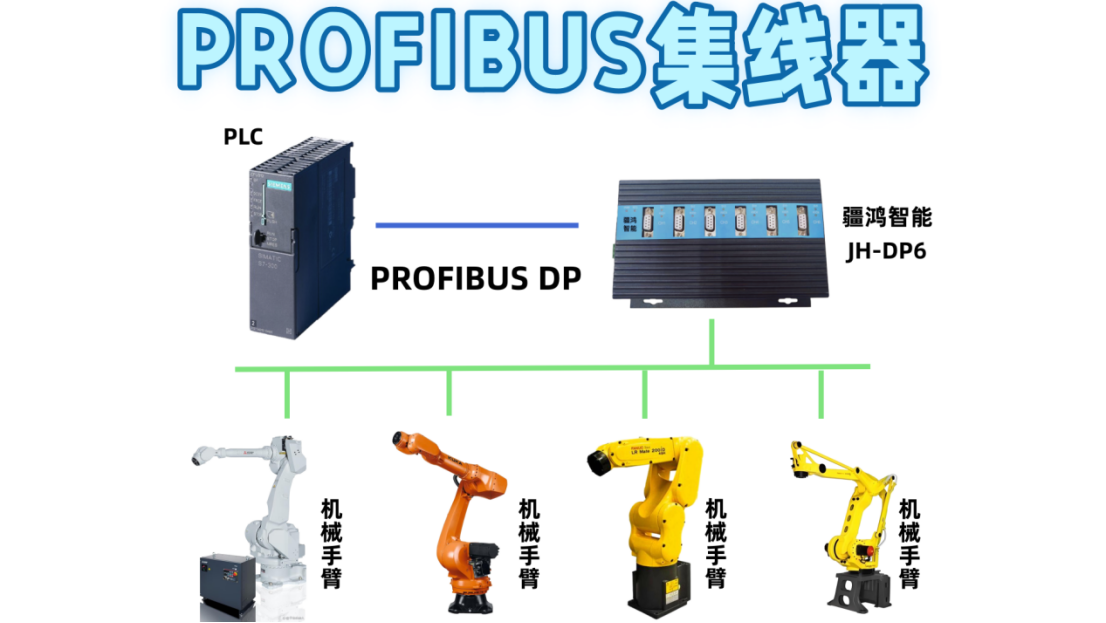
在精密裝配線上,機器人能以毫米級的精度將齒輪嚴絲合縫地壓入;在手術室,機械臂能感知到針尖穿透組織時微牛級的力量變化。這一切“神奇”操作的背后,都離不開一個關鍵部件——六維力傳感器。一、什么是六維力
2025-12-25 13:59:48471 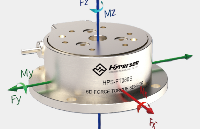
在無人機、機器人、VR等智能設備中,姿態傳感器是感知運動的核心。面對市場上六軸、九軸、十軸等不同配置,該如何選擇?本文以海凌科HLK-AS201系列為例,為你清晰解析三者的區別與選型要點。一、六軸
2025-12-22 15:27:11353 
機械臂&工業級連接器在“機器換人”、黑燈工廠的大趨勢大背景下,機械臂的分量和角色越來越重要。高可靠的工業級連接器在提升機械臂性能和耐用性方面,越來越被行業專家認可。機械臂現代化工廠的“必修課
2025-12-18 22:54:16406 
所有 官方發布的 opencv-python 核心版本(無 contrib 擴展)都無專利風險——專利問題僅存在于 opencv-contrib-python 擴展模塊中的少數算法(如早期 SIFT
2025-12-13 12:37:34
前言在伺服電機、機械臂關節、精密數控機床等場景中,工程師會面臨一個難題:傳統同軸角度檢測方案要求芯片與旋轉軸嚴格對齊,不僅機械設計復雜、裝配精度要求苛刻,且占用空間,導致線纜外漏磨損、維護成本高。而
2025-12-11 17:51:361680 
EtherCAT主站協議棧EC-Master在ROS(機器人操作系統)中的應用
2025-12-10 14:46:20325 
在Termux中調試Python代碼(以圣誕樹立例)非常簡單,核心分為環境準備、代碼編寫、運行調試三個步驟,下面一步步教你操作:
一、環境準備(首次使用需做)
Termux默認可能沒有Python
2025-12-09 09:02:50
從汽車到3C:PROFINET轉DEVICENET網關如何重塑制造邊界 1 案例背景與項目痛點 在華南一家大型3C制造企業的車間里,六軸機械臂正執行著精密裝配任務。這些機械臂原本服務于汽車制造領域
2025-12-02 16:22:57495 
某知名制藥企業的無菌制劑灌裝生產線上,并排部署了8臺高精度灌裝機械臂,在A級潔凈區(ISO5級)環境下工作,這些機械臂需要尋求安全防護方案來替代傳統的圍欄方案。傳統方案(圍欄)和安全光幕有以下痛點
2025-12-02 07:32:19156 
隨著MTi-8和MTi-680(G)RTKGNSS/INS的發布,Xsens還引入了一個新的配置參數,稱為GNSS杠桿臂(LevelArm)。GNSS杠桿臂是獲得可靠的厘米級位置、速度和方向數據
2025-11-24 12:05:03223 
復合機器人對比傳統AGV和機械臂的優勢,核心在于它突破了單一設備的功能局限,實現了“移動+操作”的深度協同,尤其在上下料和物料轉運場景中優勢顯著。經世智能復合機器人:重新定義上下料與物料轉運的效率
2025-11-21 15:32:561303 
/6.1.2_ROS2_Installation/
官方權威一步來就行了:
rosrun turtlesim turtle_teleop_key
這是ROS中一個經典的示例命令,用于通過鍵盤控制 turtlesim 仿真器中
2025-11-16 22:34:58
算法與 C++ 實時模塊開發;
- 可作為控制核心部署在高精度測量機器人、激光切割機械臂、協作機械臂、AGV導航車等系統中;
- 具備機器人動態補償算法與誤差校正方案運行環境,為“高精度機器人控制
2025-11-14 15:48:29
在東莞某3C制造車間,工程師老李盯著示波器上跳動的波形陷入沉思——價值千萬的機械臂因協議不兼容導致產線停擺,而傳統改造方案需要3個月工期。這個場景折射出中國制造業的普遍困境:全球78%的工業設備仍在使用Modbus,而Profinet的實時性優勢讓85%的高端產線趨之若鶩,協議鴻溝吞噬著智能制造的黃金機遇。
2025-11-08 12:36:541745 
2025年10月28日,全球首款220kg礦用防爆六關節工業機械臂在第二十一屆中國國際煤炭采礦技術交流及設備展覽會上正式發布。該產品由中國煤科常州研究院與匯川技術及其旗下子公司智鼎科技聯合研制
2025-11-03 16:20:26884 本文圍繞創龍科技研發的評估板,詳解 ROS2 系統使用方法。涵蓋 ROS2 環境搭建、核心概念講解、節點通信測試、功能包創建與編譯,以及可視化工具 RViz 的使用,還包括基于評估板的 ROS2 應用案例演示,幫助開發者快速掌握評估板上 ROS2 系統的部署與基礎應用開發。
2025-10-30 13:46:57309 
STMicroelectronics ASM330LHHX汽車級6軸慣性模塊是一款系統級封裝 (SiP),具有一個3軸數字加速度計和一個3軸數字陀螺儀,優化用于汽車非安全應用。ASM330LHHX
2025-10-30 11:49:04512 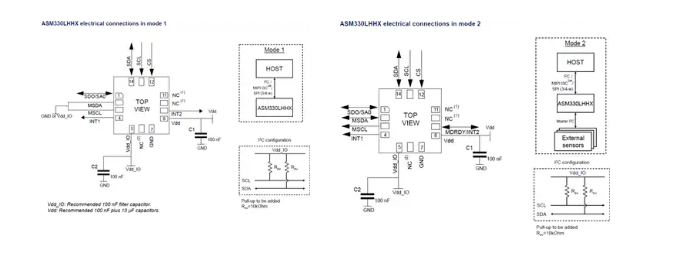
在協作機械臂的技術創新與行業應用中,北京沃華慧通測控技術有限公司憑借深厚的研發積累與豐富的落地經驗,成為企業智能化升級的可靠選擇。從技術研發到場景落地,從產品供應到持續服務,北京沃華慧通測控技術
2025-10-27 09:14:23548 
三軸傾角傳感器P/N373-6538通過同步監測X/Y/Z軸傾角與動態補償算法,為卡特彼勒D8T推土機和631K鏟運機提供六自由度姿態數據。在斜坡作業防側滑、高速轉向穩定性控制等場景中,基于CAN總線協議實現精準姿態反饋,有效提升設備操作安全性與作業精度,具備優良的環境適應性。
2025-10-22 11:04:05224 
2025RT-Thread開發者巡回培訓火熱進行中!10月25日,本周六,我們將同時在首都北京與創新之城杭州與你相約;11月1日,下周六,深圳、上海、成都三站并發!在這里你將體驗豐富的理論課程、精彩
2025-10-20 17:33:541216 
三軸傾角傳感器P/N 334-1658通過同步測量X/Y/Z軸加速度及Z軸側滑速度,為重型工程機械提供六自由度姿態監測。其在推土機斜坡作業、壓路機壓實均勻性控制及旋挖鉆機桅桿垂直度校準等場景中,通過CAN J1939協議實現精準數據反饋,有效提升設備作業安全性與控制精度。
2025-10-16 09:52:43258 
操作系統,其傳感器數據交互機制直接影響仿真的真實性與系統集成的便捷性。本文基于對aiSim中各類ROS傳感器
2025-10-11 17:32:311016 
在協作式測試設備的研發與落地中,北京沃華慧通測控技術有限公司憑借深厚的測控技術積累,成為行業核心賦能者。作為專注于智能測控設備研發的高新技術企業,北京沃華慧通測控技術有限公司深度把握協作機械臂的技術特性,構建了 “機械臂 + 專業測控模塊” 的定制化解決方案。
2025-10-11 09:34:16368 
一體化ROS智能駕駛小車及實訓教學平臺解決方案
2025-09-26 17:34:061390 等串行接口資源,支持連接各類DIY配件。
基于K1的機械臂介紹
1)myCobot 280 Risc-V機械臂
自由度:6軸。
有效負載:250g。
工作半徑:280mm。
重復定位精度:±0.5mm
2025-09-25 13:56:02
請問有沒有最新的rtthread移植micro-ros移植使用教程,使用menuconfig添加配置micro-ros軟件包?
2025-09-25 06:37:19
想一站式實戰QT圖形開發、EtherCAT通信、RPMSG多核交互?睿擎工業平臺深度實戰Workshop深圳站報名火熱進行中!這是一場專為工業開發者打造的沉浸式實戰體驗,4小時高強度實戰+工業級方案
2025-09-14 10:04:241124 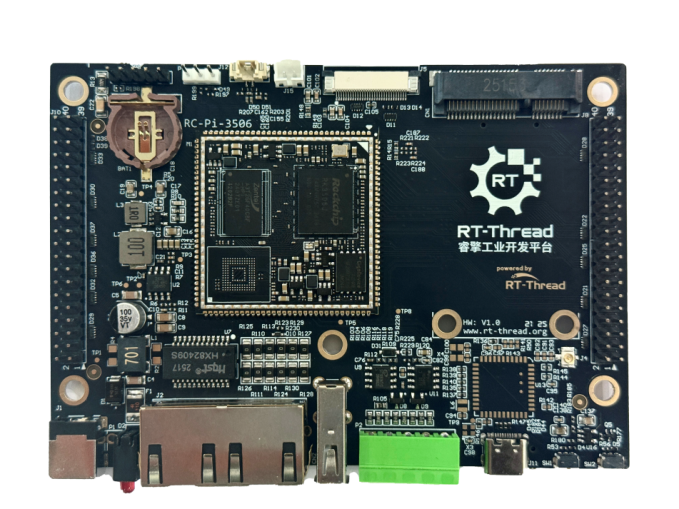
廣受歡迎的六軸多功能機器人M-710系列迎來全面升級!發那科全新推出M-710iD/50M與M-710iD/70機器人,為機床上下料、物料搬運、裝配、碼垛及焊接應用樹立新標桿。
2025-09-12 15:05:212452 2025RT-Thread嵌入式電子設計大賽正在火熱報名中,本次大賽分為嵌入式軟件大賽和硬件拓展板設計大賽兩大版塊。本次硬件拓展板設計賽道,提供了2塊開發板供大家選擇,參賽者可以二選一為其設計拓展板,分別是:睿擎派RC3506核心板和VisionBoard開發板;
2025-09-09 08:06:45870 
TDK株式會社(東京證券交易所代碼:6762)重磅推出全新的SmartMotion? ICM-536xx系列高性能六軸IMU,并向特定客戶開放供貨。
2025-09-05 09:15:35895 在現代自動化與精密制造中,機器人機械臂(人形/工業)的穩定性與效率至關重要。電容器作為電路中的基本組件,對機器人機械臂的性能發揮著至關重要的作用。01機器人機械臂的工作原理及對電容的要求機器人機械臂
2025-09-01 10:06:04453 
在某汽車零部件制造企業的生產線中,面臨著設備協議不兼容的問題。該生產線的核心控制系統采用的是西門子S7-1500PLC,其通信協議為Profinet,而用于零部件加工的機械臂則采用EtherCAT協議。由于協議差異,機械臂的動作無法與PLC的控制邏輯實時同步,導致生產效率低下,產品質量不穩定。
2025-08-30 10:55:59682 
制器已難以滿足高端設備的性能要求。而有這么一款六軸電機控制器/驅動板,憑借其高集成度和卓越的性能,成為解決多軸控制難題的理想方案。它就是由TRINAMIC運動控制
2025-08-28 12:55:27517
2025-08-21 10:32:36828 
在工程機械領域,臂架是起重機、高空作業車等工程機械的關鍵承力部件,臂架焊接的精度和質量直接影響整機的結構強度與使用壽命。傳統人工焊接方式無法滿足現代工程機械對焊接效率、精度和一致性的要求,自動設備盲
2025-08-16 15:17:49625 ROS 2(Robot Operating System 2)是機器人操作系統(ROS)的升級版,是一套開源的專為機器人開發而設計的軟件庫與工具集。作為構建機器人應用的強大框架,提供從硬件驅動到先進
2025-08-14 15:44:331771 
adxl355芯片,我這邊做了一批設備,一開始全部工作正常,后續有一次經拆裝后,個別出現了三軸中某一軸讀數全為0的情況,其余兩軸讀數正常(還有一個是xz軸異常,y軸正常,其余的為X軸異常,yz正常或
2025-08-13 07:32:47
多元需求比鄰星協作機械臂擁有出色的負載表現,別看其外觀設計精巧,卻能輕松承載較重的物品 。在工業生產中,無論是搬運大型零部件,還是在精密電子制造環節中對微小元器件進行精準操作,它都能穩定運行,重復定位精度極高
2025-08-07 17:20:48 0
0 日前,獵豹移動宣布,公司已通過旗下控股子公司簽署正式協議,擬以約9,946萬元人民幣的總對價,收購輕量型機械臂供應商深圳眾為創造科技有限公司(以下簡稱“UFACTORY”)60.8%的股份。
2025-08-05 14:07:51956 、readme.txt、
requiredMCRProducts.txt、init.py、CAO_python.ctf。
在linux環境中按照以下步驟安裝matlab runtime2018b:
① cd到MCR
2025-07-18 10:40:33
博世即將推出全新一代MEMS慣性傳感器——SMI980與SMU300,這是公司首次發布高性能六軸慣性傳感器系列。該產品可廣泛應用于輔助駕駛系統、高精定位、車載導航等場景,為車輛提供更加穩定、連續的運動感知能力。
2025-07-17 17:03:051282 GraniStudio平臺在軸復位的功能上未對同時復位的軸數進行硬性限制,理論上支持任意數量軸同步復位,需要考慮的是在做多軸同步復位時要評估機械安全風險,建議提前確認機械在多軸同時復位時是否會產生
2025-07-07 18:02:36562 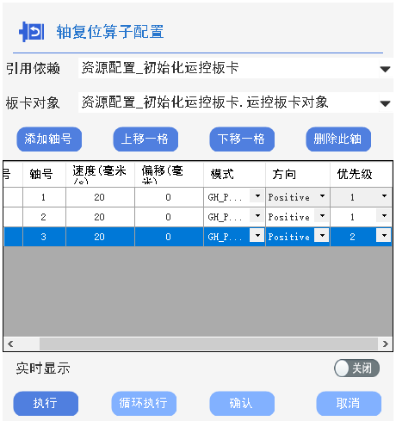
在特定的汽車零部件生產工廠焊接生產線上,機械臂被應用于焊接作業,其控制體系基于Profinet協議。同時,工廠的自動化控制體系以西門子S7-1200PLC為核心,通過ModbusTCP協議實現
2025-07-03 16:56:11478 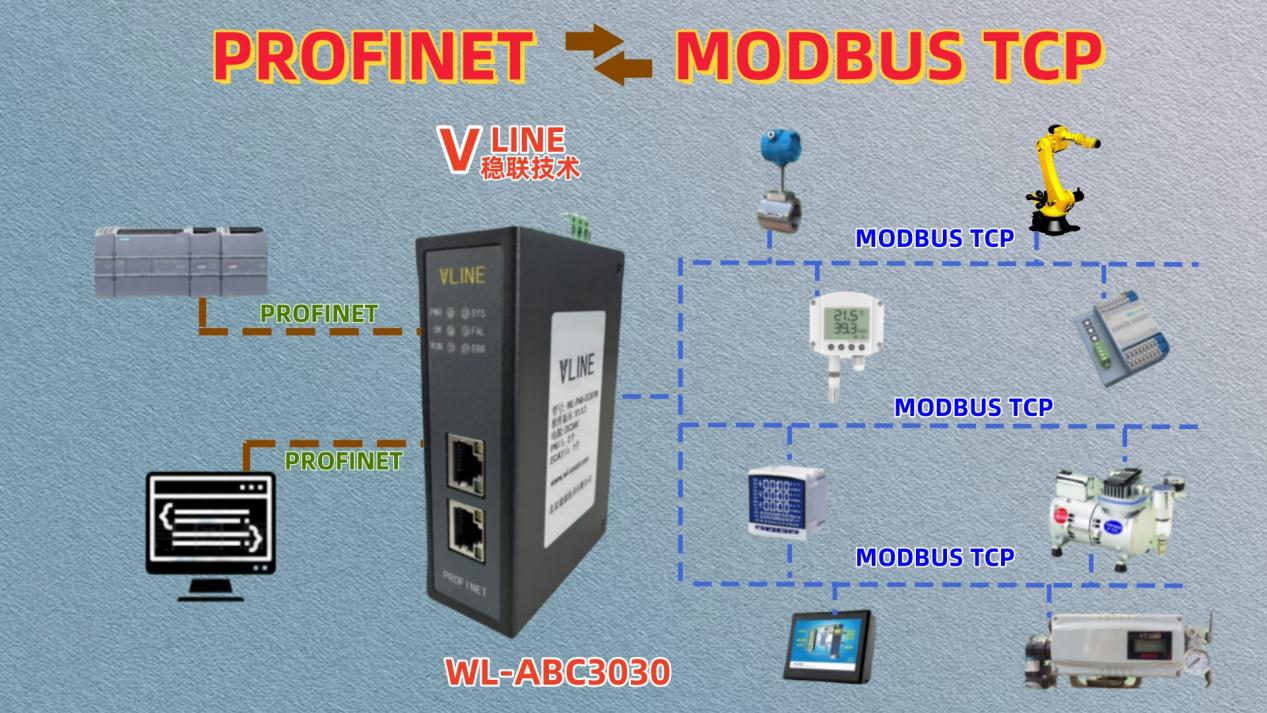
通過學習條件語句和循環,您能夠編寫出能夠根據不同情況和條件作出決策的Python程序。這些結構在編程中非常常見,對于提高編程能力和構建復雜程序至關重要。在接下來的學習和實踐中,不斷練習這些概念,您將能夠更自如地運用它們來解決實際問題。
2025-07-03 16:13:53
IGBT以發射極電壓為基準電位驅動。開關動作時,上橋臂IGBT的發射極電位VE在0伏和母線電壓V+之間變化。在AC200V電路中,要開通上橋臂IGBT時,需要對門極施加300V加15V,合計315V的母線電壓。因此,需要不受開關噪聲干擾影響的上橋臂驅動電路。
2025-07-03 10:46:044753 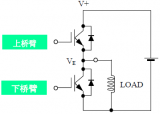
開源:Github:https://github.com/Hello-XSJ/RDK\_vlm\_demo.git-本項目聚焦腿臂機器人在多模態環境感知、自然語言交互和自主行為控制方面的技術瓶頸
2025-07-01 20:27:471067 
"的三級跳演進。思嵐科技(SLAMTEC)針對機械臂所需的48V供電環境以及工作環境特性,正式推出全新升級的48V赫爾墨斯(Hermes)具身智能機器人通用底盤。用戶可以非常快速的將多臂系統結合運動底盤組成復合型機器人并
2025-07-01 16:11:51633 
導語:6月26–27日,2025年東莞電子熱點解決方案創新峰會即將開幕,六大論壇、百家展商集結,當前報名持續火熱,參會工程師請盡快鎖定席位! 隨著終端系統復雜度不斷提升,電子器件廠商正在從單點產品
2025-06-25 09:14:18616 
電子發燒友網站提供《多軸運動控制器JMC-F2-A6中文手冊.pdf》資料免費下載
2025-06-23 15:14:462 在全球工業 4.0 浪潮下,六軸機械臂憑借高精度、高靈活性、高適應性與高實用性等優勢,在汽車制造、工業制造、醫療、物流、食品加工等,需要高自由度、復雜軌跡和動態環境的應用場景中發
2025-06-23 13:52:481686 
在智慧工廠中,機械臂的性能和安全性需通過靜態與動態測試來保障。批量化測試時,后臺需實時顯示數據曲線和異常數據。GZCOM-NET憑借高效穩定的無線傳輸,為機械臂測試提供可靠方案。行業背景:機械臂測試
2025-06-20 11:36:39728 
大家好。剛學習BLDC電機的帶霍爾六部方波驅動,今晚試著開始做方波驅動。使用的電機是帶霍爾的無刷電機。單片機是STM32的,霍爾使用3個外部中斷來讀霍爾值,讀到值后,再執行對應的MOS狀態。
電機
2025-06-17 07:58:58
2025年6月20日,2025中國(深圳)集成電路峰會(簡稱ICS2025峰會)將在深圳市南山區隆重舉辦。目前,ICS2025峰會的報名人數已超600人,覆蓋企業達數百家。ICS2025峰會大咖云集
2025-06-16 11:16:251388 
SC7U22TH 六軸mems慣性傳感器是一款高集成度、低功耗慣性測量單元(IMU),內置高性能三軸加速度計和三軸陀螺儀測量單元。加速度計量程范圍±2g/±4g/±8g/±16g,陀螺儀
2025-06-14 09:41:41
開源電機驅動,免費直播學習!
2025-06-13 10:07:231439 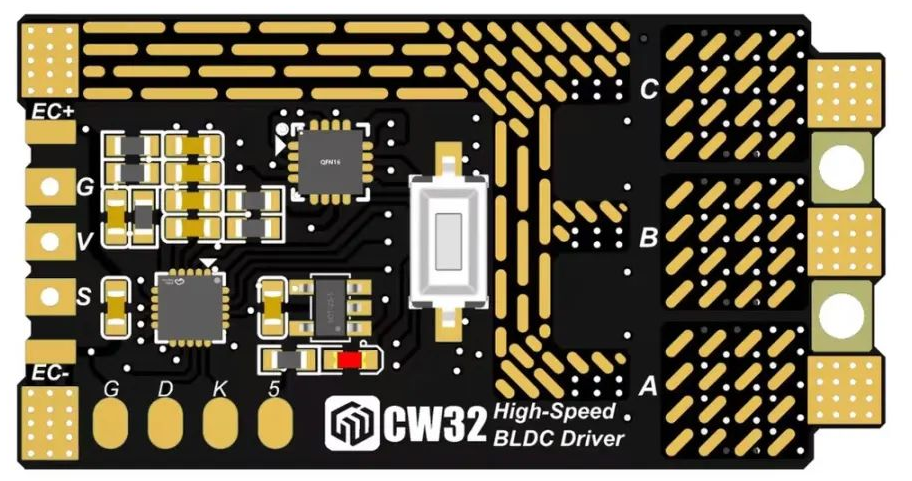
國泰海通發布研報稱,根據CNBC報道,為代替人類員工工作,亞馬遜已在其倉庫部署具備觸覺傳感能力的機械臂Vulcan用于從散裝貨物中挑選商品并放置到貨架上。觸覺是實現靈巧操作的關鍵,也是人形機器人泛化
2025-06-07 16:42:35597 
電機是現代工業中不可或缺的動力設備,廣泛應用于各種機械系統中。然而,在電機的運行過程中,有時會出現一種被稱為“軸電流”的現象,這種現象不僅會影響電機的正常運行,還可能導致設備的損壞。那么,電機
2025-06-07 16:14:011110 
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系列以“全球最輕的六軸機械臂”聞名,累計銷量超數萬臺,覆蓋
2025-06-06 16:55:321207 
“只需2秒鐘左右,脈沖激光束就能完成孔徑0.3毫米、傾斜角25度的發動機氣膜冷卻孔加工,”在前不久舉行的中國國際機床展和第20屆光博會上,華工科技復雜曲面六軸激光微孔加工裝備一經亮相就吸引了眾多觀眾的目光。
2025-06-04 09:44:11862 礎的學習者介紹一門時下比較流行、并且用途比較廣泛的編程語言,所以,本書讀起來不晦澀,并且在其中穿插了很多貌似與Python 編程無關,但與學習者未來程序員職業生涯有關的內容。
獲取完整文檔資料可下載附件哦!!!!
如果內容有幫助可以關注、點贊、評論支持一下哦~
2025-06-03 16:10:55
電子發燒友網站提供《ros2教程.pdf》資料免費下載
2025-05-23 09:12:261 閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和自主導航的核心技術有了更深入的理解。以下是我的心得體會
2025-05-03 19:41:47
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
2025-04-30 01:05:09
的應用。書中詳細介紹了如何在ROS 2中實現二維碼識別,包括二維碼掃描庫Zbar的使用,以及如何通過相機識別二維碼。
通過學習這一部分,我了解到二維碼識別的基本原理和實現步驟。首先,需要通過相機獲取環境圖像
2025-04-27 11:42:22
更加深刻理解相關內容
1. 三階段遞進式學習體系
基礎原理篇(1-3章)
從ROS發展史到ROS 2核心架構,緊接著深入解析通信機制,通過對話題(Topic)、服務(Service)、動作
2025-04-27 11:24:32
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系列以“全球最輕的六軸機械臂”聞名,累計銷量超數萬臺,覆蓋
2025-04-25 17:59:18
革新產品——全球首款基于RISC-V全棧開源的六軸協作機械臂 myCobot 280 RISC-V 。 進迭時空 RISC-V ? ? 進迭時空是一家基于 RISC-V架構的AI CPU芯片企業 ,布局
2025-04-25 14:19:291556 
介紹了一種電機聯軸控制的旋轉機械結構。振動模態分析是電機優化設計的重要步驟,本文利用ANSYS有限元軟件對定轉子模態模型進行了詳細的計算和分析,得到了其模態固有頻率和振型。仿真結果對振動實驗和定轉子
2025-04-24 21:07:12
特性優點更安全 產品通過 ENISO 13849-1:2015(PL=d,CAT 3}、歐盟 CE、北美 NRTL、韓國 KCS、中國 CR、SEMIS2等認證,核心部件全國產化, 支持 10 級碰撞檢測和傳感器安全檢測,無需安全防護 更開放 開放的系統平臺,支持SDK、AP,多種通訊方式,可與多種末端治具,視覺、移
2025-04-22 16:01:38
做ros小車仿真實驗室時,用Solidworks到處urdf文件,但沒有四驅輪式機器人三維模型(stp 文件),要去哪里找免費的。(小車型號為ABOT-M1)
2025-04-09 21:57:51
在工業生產邁向智能化的進程中,機械臂憑借高效、精準的特性,成為眾多制造企業的得力助手。然而,在機械臂頻繁執行任務的過程中,機械手臂關節的控制難題逐漸凸顯,嚴重制約了機械臂性能的進一步提升。鈞敏
2025-04-09 10:47:32938 電子發燒友網站提供《Python從入門到精通背記手冊.pdf》資料免費下載
2025-03-28 17:43:5585 2025年星閃技術應用巡回研討會-深圳站火熱報名中,感興趣的可以關注【國際星閃聯盟】微信公眾號了解活動信息。
2025-03-25 10:17:55
在這篇文章中,我將為你簡要介紹Python程序是什么、Python程序可以用來做什么,以及如何在RaspberryPi上編寫和運行一個簡單的Python程序。什么是Python程序?Python
2025-03-25 09:27:111674 
、樹莓派+機械臂,科技界的“夢幻組合”樹莓派,這款小巧而強大的單板計算機,一直以來都是科技愛好者的寵兒。而myCobot機械臂,作為一款高性能的六軸機械臂,更是憑
2025-03-25 09:23:11712 面積40000㎡, 預計吸引800家知名企業參與,35000名專業觀眾到場參觀洽談。 ? 經六屆深耕沉淀,越來越多的半導體與電子企業選擇博覽會平臺布局西部川渝市場,通過專業的技術展覽、參觀交流與論壇研討,高效打通全產業鏈人脈。在博覽會火熱籌備中,
2025-03-21 14:07:24418 
你想把你的職業生涯提升到一個新的水平?Python在嵌入式系統中正在成為一股不可缺少的新力量。盡管傳統上嵌入式開發更多地依賴于C和C++語言,Python的優勢在于其簡潔的語法、豐富的庫和快速的開發周期,這使得它在某些嵌入式場景中非常有用,以下是Python在嵌入式系統中的一些應用場景。
2025-03-19 14:10:421309 工業機械臂負載作業時,往往重達幾百斤甚至更重,提升效率的同時,如果它們“意外傷人”,后果不堪設想。
2025-03-17 09:47:41938 他設備的交互。
增強的便攜性:集成了一個可充電的7.4V鋰離子電池,以提高移動性和易用性。
精密工程:引入滾珠軸承和行星齒輪系統,使運動更平穩、更精確,使Pedro更接近真實的機械臂。
OLED顯示屏
2025-03-10 11:22:55
創建了用于OpenVINO?推理的自定義 C++ 和 Python* 代碼。
在兩個推理過程中使用相同的圖像和模型。
從 C++ 代碼中獲得的結果與 Python* 代碼不同。
2025-03-06 06:22:40
,從ROS 2發展的時間軸中,大家可以看到ROS 2的生態正在快速迭代發展。
圖 ROS 2的發展歷程
如何學習 ROS
相信不少學習ROS的小伙伴都看過“古月居”發布的一系列學習資料,在這里
2025-03-03 14:18:22
搭建MFC致動的柔性臂構件試驗系統,測試得到了柔性臂構件的末端變形位移與MFC致動器驅動電壓之間的雙極性非對稱遲滯特性。
2025-03-01 10:40:54714 
運動。 ? ? ? 通過本教程,您將學習如何讀取并處理這些數據,為您的項目添加運動檢測和姿態控制功能。 一、硬件連接 ? ? ? ?在開始編程之前,首先需要正確連接MPU6050模塊到零知增強板。 1.所需材料: 零知增強板 MPU6050六軸傳感器模塊 跳線若干 ?2.硬件連接示意圖:
2025-02-20 16:17:081958 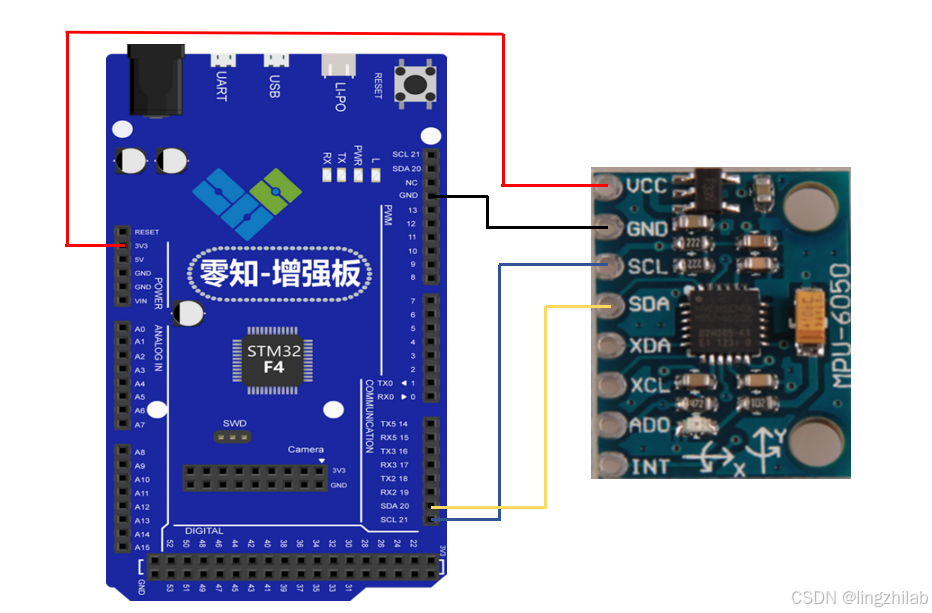
本帖最后由 PCB56242069 于 2025-2-20 17:27 編輯
?零知增強板I2C通信
本教程將指導您如何使用零知增強板與MPU6050六軸傳感器模塊進行交互
2025-02-20 15:53:29
磁致伸縮位移傳感器是一種基于磁致伸縮效應的高精度位移測量裝置,具有非接觸式、高分辨率、長壽命和強抗干擾能力等特點。在機械臂與機器人領域,其應用正逐漸成為提升系統性能的關鍵技術之一
2025-02-15 14:22:34865 本文重點介紹了一款專為機器人教育而設計的具有動態跟蹤功能的創客友好型機械臂 硬件組件 M5Stack ESP32 Basic Core IoT Development Kit Raspberry
2025-02-12 11:12:221198 
本文通過使用myCobot機械臂進行QR碼視覺追蹤的實踐案例分析,介紹如何將 python 文件導入到 ROS 系統中。
2025-02-11 11:08:131307 
人們對深度學習和機器學習等領域日益增長的興趣。這些技術使機器人能夠自主學習和執行人類任務,例如折疊衣服或做飯。為了實現這些功能,必須收集大量數據,并且必須采用一種便捷的方式來控制機械臂。設計這種外骨骼的主要目標是滿足這一需求。 ? 項目硬件介紹 ?
2025-02-11 09:50:161025 
封裝到驅動中,在應用中只需調用該驅動的讀寫數據接口,不必關心設備的具體操作。硬件原理從原理圖中可以看到,六軸傳感器相連的引腳分別為:時鐘SPI1_SCLK、片選SPI1_SS0、輸出SPI1_MOSI、輸入
2025-02-10 11:02:31
第九屆全國大學生集成電路創新創業大賽(以下簡稱“集創賽”)正式開始報名。算能在處理器應用方向特別設立了“TPU賦能的邊緣計算架構優化與創新應用設計”賽題,誠邀各校參賽隊伍充分發揮TPU的算力優勢
2025-02-06 13:41:431731 
根據持續的用戶反饋,目前市場對 PLC 與 myCobot 系統集成的需求很大,因此本文提供的案例介紹了如何使用 PLC(可編程邏輯控制器)來控制 myCobot 320 機械臂。本案例重點介紹
2025-01-23 14:03:462362 
裝: bash復制代碼conda install -c conda-forge xgboost 2. 導入必要的庫 在你的Python腳本或Jupyter Notebook中,導入必要的庫: python復制代碼 import xgboost as xgbimport p
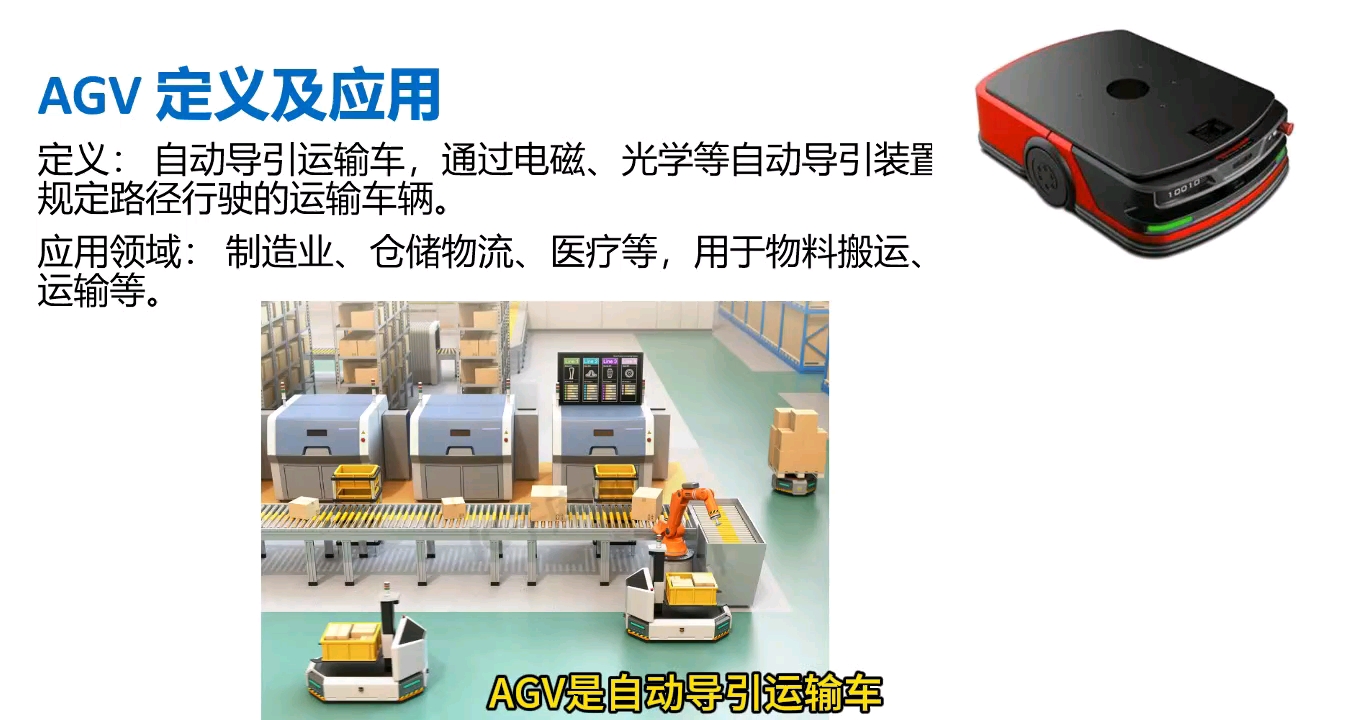
2025-01-19 11:21:402327 AGV+機械臂復合機器人逐漸打開市場,實現物料自動搬運、上下料、分揀等“無人搬運”。結合信息系統運作,調度人員下達指令,實現車間智能化,是未來機器人技術發展的趨勢。
2025-01-16 18:12:51849 
這篇文章是來自Automatic Addison的開源項目,已獲作者授權轉載自github。本項目的主要內容是使用myCobot 280機械臂結合ROS2系統搭建機械分揀站。
2025-01-15 09:22:062001 
;2、掌握機械臂識別顏色抓取積木的實現方法。三、實驗原理顏色識別抓取積木功能:實現識別出不同顏色的積木,機械臂夾取后并放在相應的位置中。機械臂通過攝像頭檢測算法識
2025-01-15 08:07:561344 
同軸度是描述兩個軸線間相對位置的機械公差概念,指被測軸線與基準軸線間的偏差,表現為被測軸線的彎曲、傾斜或偏移。在機械加工中,同軸度的應用主要體現在以下幾個方面: 一、確保零件對中精度 同軸度在軸類
2025-01-08 17:30:182289
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論