 六維力傳感器:機器人的“觸覺”,選末端還是內置?
六維力傳感器:機器人的“觸覺”,選末端還是內置?

在精密裝配線上,機器人能以毫米級的精度將齒輪嚴絲合縫地壓入;在手術室,機械臂能感知到針尖穿透組織時微牛級的力量變化。這一切“神奇”操作的背后,都離不開一個關鍵部件——六維力傳感器。
一、什么是六維力傳感器?
簡單說,它是一個能同時測量三個方向力(Fx, Fy, Fz)和三個方向力矩(Mx, My, Mz)的高精度儀器。其核心在于內部的精密彈性體與應變計,通過解耦算法,將復雜的受力情況清晰量化。
海伯森洞察:真正的難點不僅在于測量,更在于如何在高速、高負載、溫差變化等復雜工況下,保持長期穩定的精度與極低的軸間耦合干擾。這正是高端傳感器技術的壁壘所在。
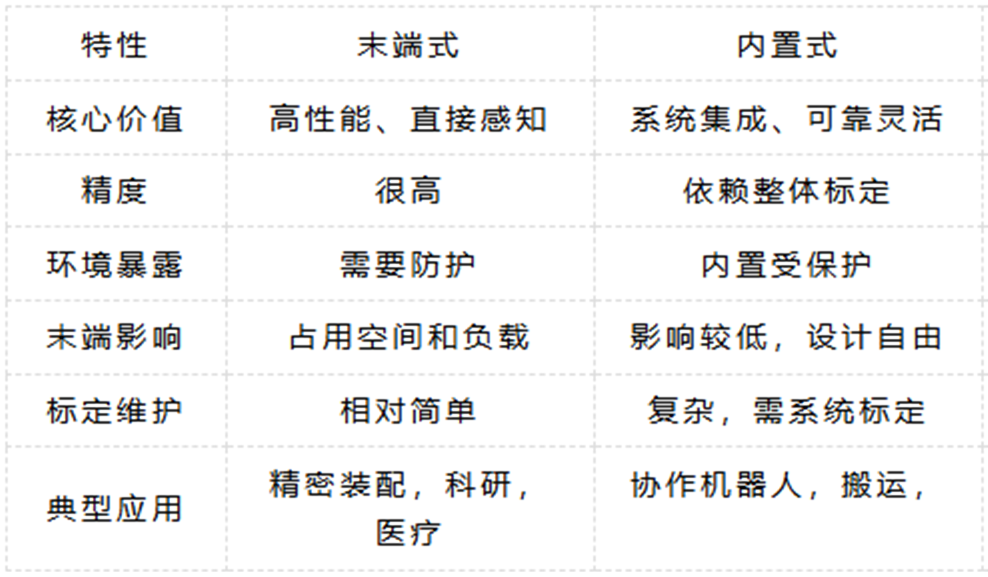
二、兩大流派:末端直接測量 vs 一體式集成
根據安裝位置,六維力傳感器主要分為兩大技術流派。它們各有千秋,適用于不同的場景。
方案一:末端安裝式——追求極致的“指尖觸覺”
安裝位置:機器人末端法蘭與工具之間。
工作原理:直接測量,獲取最純凈的末端接觸力。
海伯森代表性產品:HPS-FT系列 六維力傳感器
該系列是海伯森面向高精度、高動態場景的旗艦產品,其設計充分體現了對“極致性能”的追求:
超高精度與靈敏度:采用高精度應變計及結構設計和先進的信號處理技術,實現低漂移和<2%FS的軸間串擾,確保測量數據真實可靠。
卓越的動態響應:高剛度設計帶來高固有頻率,能準確捕捉瞬態力變化,非常適合精密裝配、醫療康復器械等對實時性要求極高的領域。
堅固與精密并存:在提供高達數百牛至數千牛力量程的同時,依然能分辨出微力的變化,兼具“開山斧”與“引線針”的雙重特質。
缺點:如同所有末端傳感器,它直接面對工作環境,需注意防碰撞與高污染。
方案二:內置式——注重可靠的“手腕神經”
安裝位置:集成于機器人手臂內部(如關節處)。
工作原理:間接推算,通過動力學模型由內側受力反推末端外力。
海伯森技術應對:
內置式方案的核心挑戰是模型精度和抗過載能力。
高可靠性設計:海伯森傳感器固有的強抗過載、抗沖擊性能,正是內置式傳感器在機器人關節內部承受復雜內力的關鍵保障。海伯森080系列產品依據國家強制標準 (GB/T 3836.1-2021 和 GB/T 3836.4-2021),通過了煤科(北京)檢測技術有限公司的檢驗,取得了防爆合格證。
精準標定支持:海伯森建立的高精度標定系統,能為機器人本體廠商提供可靠的傳感器標定數據,為后續的全身動力學參數辨識奠定堅實基礎。
典型應用:這是目前大多數協作機器人廠商選擇的方案。機器人制造商通過集成此類傳感器,實現對拖動示教、碰撞檢測、柔順控制等核心功能的支持。
如何選擇?
三、未來展望:融合與智能
未來的趨勢并非二選一,而是融合與智能化。無論傳感器位于何處,其最終目標都是為機器人控制器提供最準確的環境交互信息。
海伯森正在推動的技術方向包括:
更智能的傳感器:內置集成溫度補償及微處理器、狀態自診斷,輸出更穩定、更可靠的信息。
更完善的解決方案:不僅提供傳感器硬件,更能結合行業工藝,提供包括標定、算法在內的軟硬件一體化力控方案,降低用戶的使用門檻。
總結而言:
如果你的機器人在執行“醫療手術”或“芯片封裝”,請為它配備安置在末端直接測量。
如果你的機器人需要在生產線上各類任務間靈活切換,那么一個內置的、可靠的一體式集成系統更為合適。
理解技術本質,匹配場景需求,正是選擇傳感器的關鍵。而海伯森正通過持續創新,為機器人的“觸覺進化”提供著堅實的“全維”支撐。
關注我們,獲取更多高端傳感器及各方面應用解析。
-
機器人
+關注
關注
213文章
31240瀏覽量
223082 -
六維力傳感器
+關注
關注
1文章
35瀏覽量
1676
發布評論請先 登錄





 工商網監
工商網監
評論