") 完美CP來(lái)啦!當(dāng)AGV遇上機(jī)械臂!
完美CP來(lái)啦!當(dāng)AGV遇上機(jī)械臂!

AGV
隨著工廠內(nèi)部制造復(fù)雜程度的日益上升,對(duì)于自動(dòng)化設(shè)備柔性化的需求也更加迫切,相比于AGV和機(jī)械臂的單一功能,集合了兩者特性的復(fù)合型機(jī)器人近年來(lái)開始逐漸打開市場(chǎng)。
尤其是在廠內(nèi)物流搬運(yùn)環(huán)節(jié),無(wú)軌導(dǎo)航激光AGV小車加裝機(jī)械手,配合車載裝卸機(jī)構(gòu),可自動(dòng)裝載貨物,無(wú)軌AGV小車自動(dòng)行駛指定位置后,機(jī)械手自動(dòng)卸貨,并放置到制定位置。可快速布局于自動(dòng)化工廠、倉(cāng)儲(chǔ)分揀、自動(dòng)化貨物超市,實(shí)現(xiàn)物料自動(dòng)搬運(yùn)、物品上下料、物料分揀等,使廠內(nèi)物流可以實(shí)現(xiàn)真正的“無(wú)人搬運(yùn)”。
 AGV無(wú)人物流
AGV無(wú)人物流
看似簡(jiǎn)單的上下料動(dòng)作,實(shí)際要解決的難點(diǎn)卻不少:比如AGV與機(jī)械臂工作站的對(duì)接,如何在AGV到達(dá)定位點(diǎn)后下達(dá)指令讓機(jī)械臂動(dòng)作?如何在機(jī)械臂完成一面的上料或者下料后立即開始旋轉(zhuǎn),并在機(jī)械臂在完成整個(gè)貨架的上下料后立即離開,把等待時(shí)間縮減到最小等。
AGV機(jī)械臂
復(fù)合機(jī)器人基于AGV的結(jié)構(gòu),具備了精確定位“行走”的功能,其搭載的機(jī)械臂實(shí)現(xiàn)了在各種工況下的定制作業(yè)。結(jié)合ERP/MES等信息系統(tǒng)的指令,復(fù)合機(jī)器人與信息系統(tǒng)結(jié)合運(yùn)作。調(diào)度人員通過(guò)系統(tǒng),向復(fù)合型機(jī)器人下達(dá)物料運(yùn)輸、上下料的指令,車間智能化由此形成。
復(fù)合機(jī)器人
總體而言,隨著機(jī)器人技術(shù)的不斷精進(jìn)以及越來(lái)越復(fù)雜的場(chǎng)景需求,相信AGV+機(jī)械臂這種“手腳并行”的機(jī)器代人方式必將是未來(lái)趨勢(shì)。
審核編輯 黃宇
-
AGV
+關(guān)注
關(guān)注
28文章
1566瀏覽量
43743 -
機(jī)械臂
+關(guān)注
關(guān)注
14文章
597瀏覽量
26170
發(fā)布評(píng)論請(qǐng)先 登錄
射頻RFID+機(jī)械臂:工業(yè)零部件加工后智能分揀
堆高式AGV:如何用科技讓重物“輕如鴻毛”?
DLP160CP數(shù)字微鏡器件:超緊湊設(shè)計(jì)與高性能的完美結(jié)合
告別圍欄時(shí)代!激光雷達(dá)讓機(jī)械臂產(chǎn)線“智能守衛(wèi)”效率飆升

復(fù)合機(jī)器人對(duì)比傳統(tǒng)AGV和機(jī)械臂的優(yōu)勢(shì)何在?

當(dāng)AI遇上創(chuàng)客,涂鴉智能要在深圳搞點(diǎn)“大事”!

傳統(tǒng)測(cè)試設(shè)備的局限與協(xié)作機(jī)械臂的破局

機(jī)器人機(jī)械臂效率提升的革命性解決方案:上海永銘電容器實(shí)踐

EtherCAT轉(zhuǎn)Profinet協(xié)議轉(zhuǎn)換網(wǎng)關(guān)實(shí)現(xiàn)PLC與機(jī)械臂通訊的配置案例

創(chuàng)想智控焊縫跟蹤+發(fā)那科機(jī)器人實(shí)現(xiàn)工程機(jī)械臂架焊接智能化升級(jí)
協(xié)作機(jī)械臂產(chǎn)品介紹
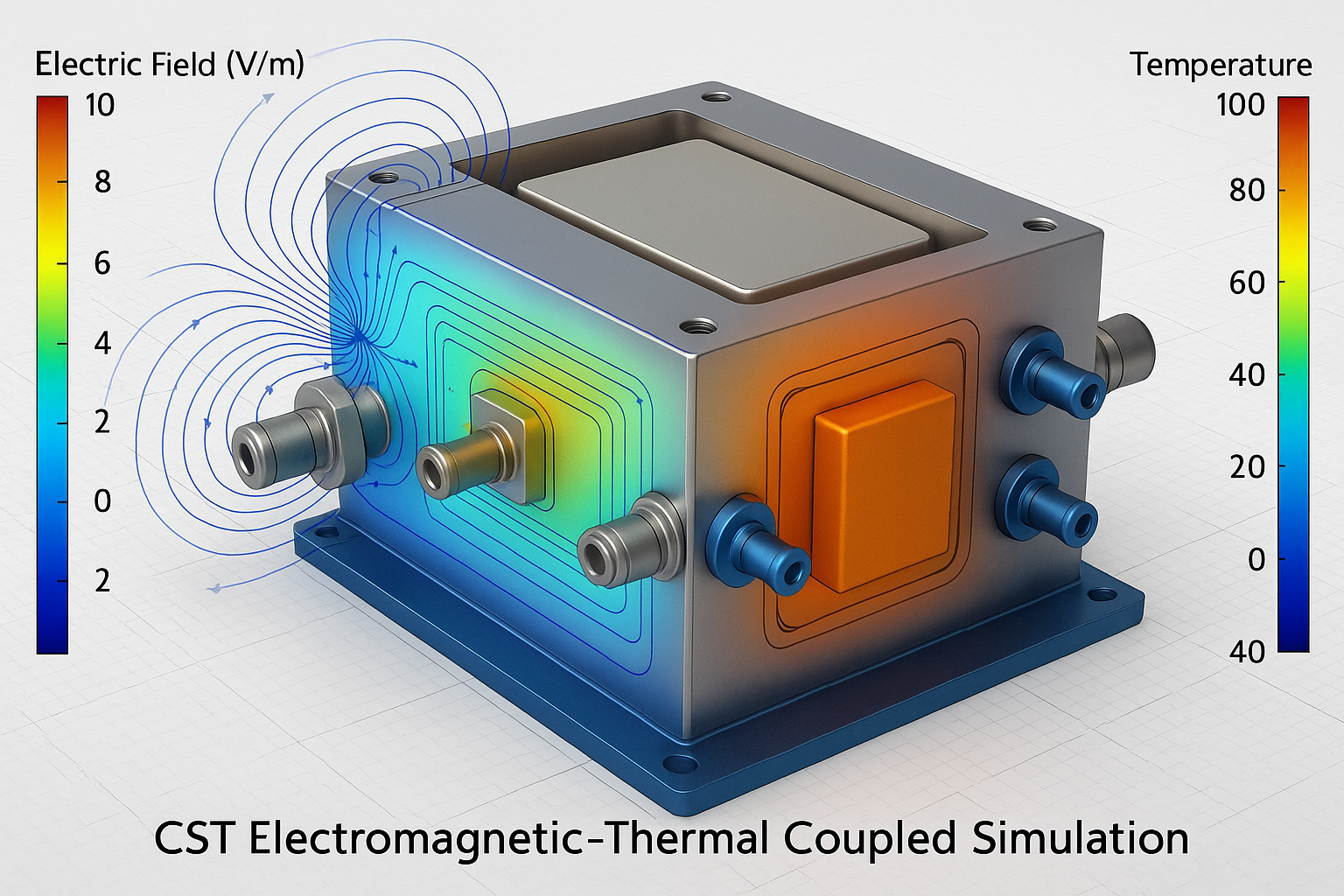
電磁遇上熱與應(yīng)力-CST多物理場(chǎng)仿真解決復(fù)雜工程挑戰(zhàn)
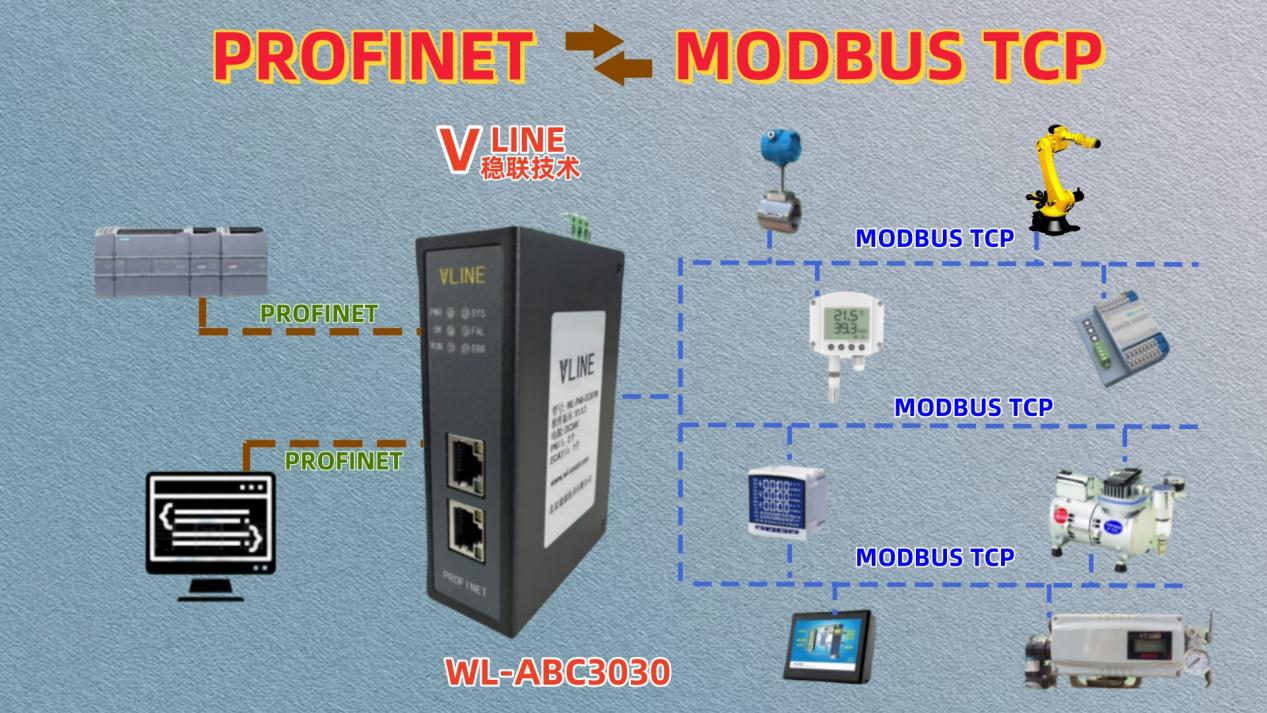
PROFINET轉(zhuǎn)MODBUS TCP網(wǎng)關(guān)在機(jī)械臂通信操作中的應(yīng)用研究
GZCOM-NET:為機(jī)械臂測(cè)試帶來(lái)高效無(wú)線解決方案!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論