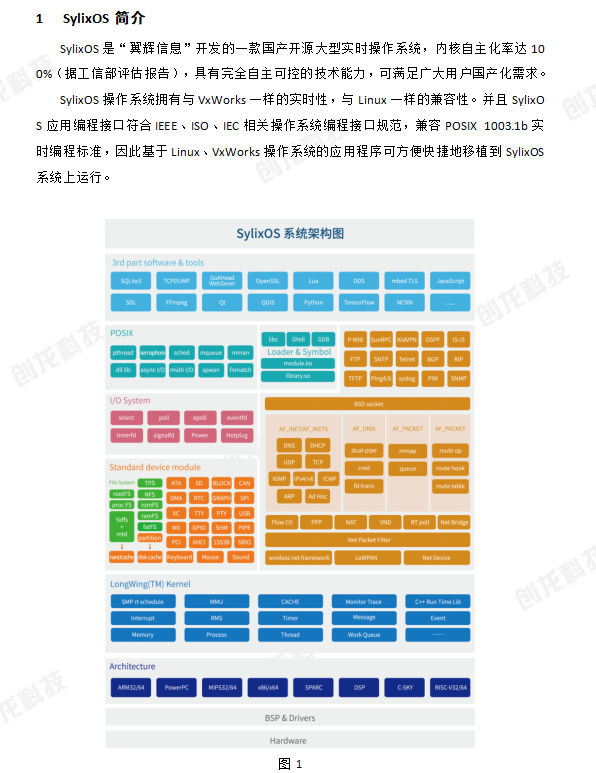
 如何基于翼輝信息SylixOS開發ROS 2應用
如何基于翼輝信息SylixOS開發ROS 2應用

ROS 2(Robot Operating System 2)是機器人操作系統(ROS)的升級版,是一套開源的專為機器人開發而設計的軟件庫與工具集。作為構建機器人應用的強大框架,提供從硬件驅動到先進算法的一站式解決方案,同時輔以功能強大的開發工具,助力工程師與研究人員高效完成項目開發。ROS 2 在實時性、安全性、靈活性和跨平臺支持等方面進行了顯著的改進,為現代機器人開發提供了一個更加高效和可靠的軟件框架。
大型實時操作系統SylixOS 現已完成了對 ROS 2 的適配,硬實時操作系統配合 ROS 2 強大的功能,可以為機器人制造商提供更多場景落地的可能性。
ROS 2 for SylixOS 具備以下優勢
SylixOS 為100% 國產化系統,底層使用全國產化平臺,且支持豐富的國產硬件平臺,符合自主可控要求。
基于硬實時操作系統運行 ROS 2,具有極高的實時性和確定性,通信延遲抖動小于 3μs(相比之下,Linux 同硬件平臺實測為 90μs),滿足高實時性要求場景。
實現開發環境與運行環境解耦,運行環境輕量,僅需1GB 存儲空間和 300MB內存,適用于資源受限場景。
可結合翼輝 ACU(智能算控單元),軟硬一體,加速產品落地。想了解更多 ACU 介紹,點擊查看
底層系統由商業公司維護,可提供更加全面的服務與技術支持。
SylixOS 已在航空航天、軌道交通等高端工業領域實現規模化應用,其成熟的工業級外設驅動框架具備微秒級任務切換與納秒級中斷響應能力,可直接對接 ROS 2 的硬件控制節點,顯著提升機器人硬件集成效率。
可快速接入翼輝技術體系,獲得一站式便捷、高效的軟件開發體驗,如翼輝云樞(現代化開發流水線)、ARMORY (軟件管理工具)、VSOA(分布式軟總線) 等。想了解現代化軟件工廠翼輝云樞可點擊查看
RealEvo-Stream集成了ROS 2開發組件,用戶能夠利用RealEvo-Stream快速高效地開發SylixOS下的ROS 2應用,下面將展示如何使用RealEvo-Stream快速開發、部署和運行ROS 2應用。
快速搭建開發環境
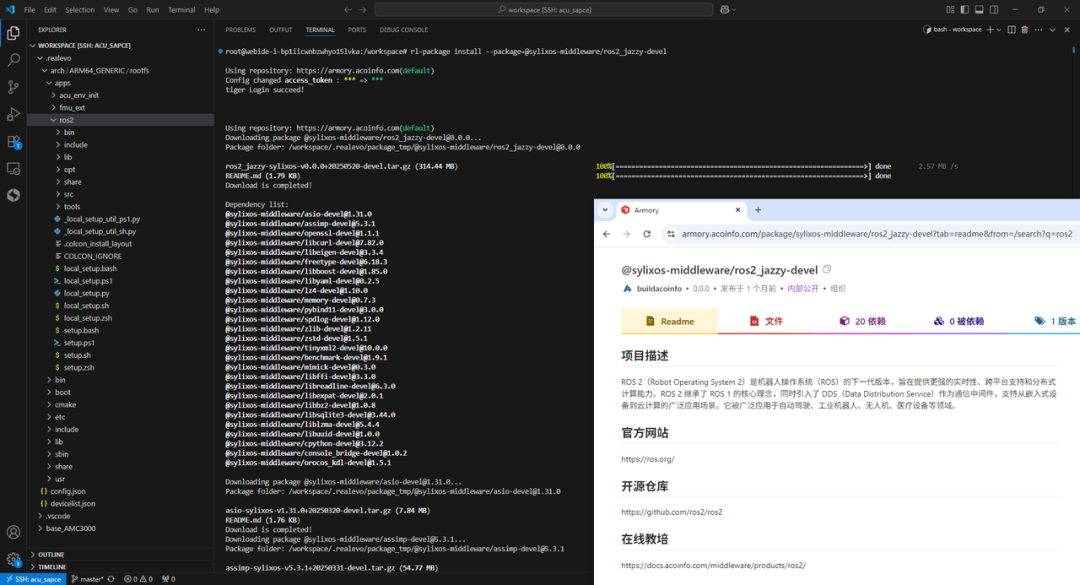
在 Linux 平臺,ROS 2 的版本通常與所使用的操作系統發行版以及開發環境緊密綁定,開發環境與運行環境需保持一致,缺乏靈活性。相比之下,ROS 2 for SylixOS 不存在此類強依賴問題。借助 RealEvo-Stream,開發者可在當前工作空間中一鍵安裝所需的 ROS 2 開發環境,每個工作空間相互獨立、版本隔離,互不干擾。下圖展示 ROS 2 for SylixOS 開發環境安裝過程。
兼容 ROS 2 官方工具集開發方式
RealEvo-Stream 提供圖形化界面,便捷創建 ROS 2 工程,擺脫命令行操作。在工程創建完成后,開發方式與官方 ROS 2 保持兼容,開發者無需改變原有開發習慣。RealEvo-Stream 內置并封裝了 ROS 2 構建系統,支持交叉編譯,能夠自動處理構建過程中涉及的編譯命令與環境變量差異,大幅簡化異構平臺下的開發流程。下圖展示 ROS 2 for SylixOS 工程創建、包創建以及構建過程。
一鍵部署 ROS 2 運行環境
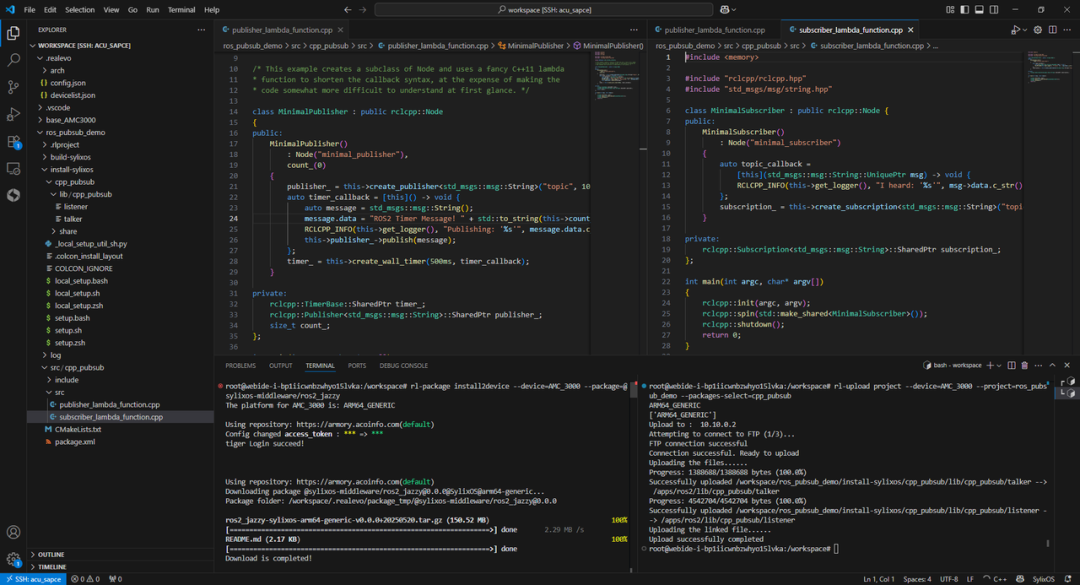
RealEvo-Stream 支持 ROS 2 運行環境的一鍵部署。與其他 SylixOS 生態組件一樣,ROS 2 的開發包與運行包統一發布在翼輝 ARMORY 制品倉庫中,用戶可通過 RealEvo-Stream 快速獲取并部署到目標設備,支持本地及云端的無感知部署。設備運行環境初始化完成后,用戶可將應用程序一鍵部署至設備,既可選擇部署完整工程,也可僅部署指定功能包,靈活高效。
ROS 2 運行
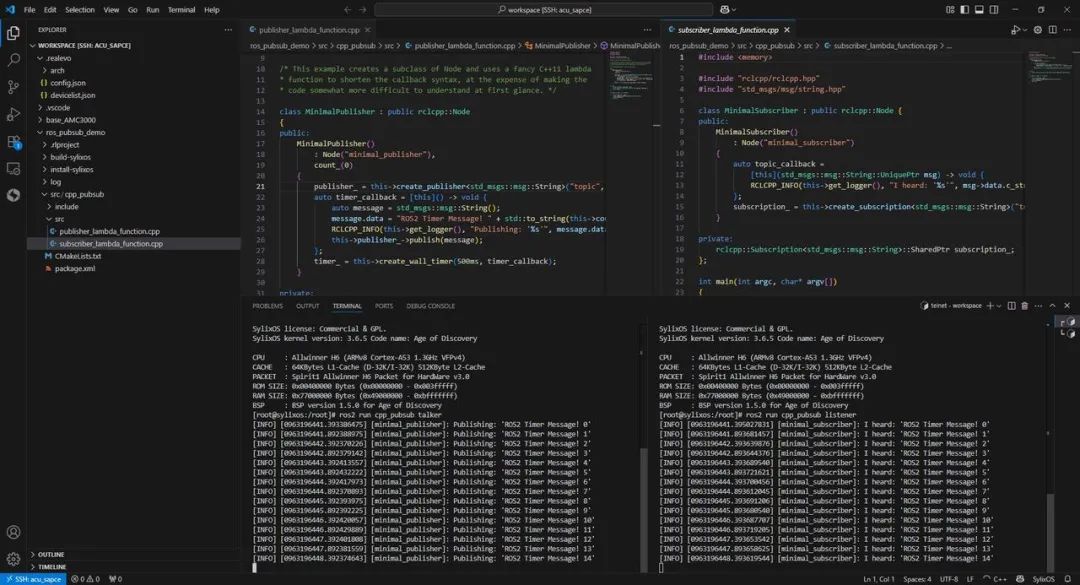
SylixOS 下的 ROS 2 運行環境兼容官方運行時命令集,支持節點管理、主題管理、消息監控等核心功能。ROS 2 for SylixOS 支持 Python 3 和 C/C++ 多語言開發,可實現跨語言節點通信,同時提供包括 UDP 與共享內存在內的多種高效通信機制。下圖展示一個簡單的 ROS 2 節點間通信實例。
RealEvo-Stream 輕量化開發環境,更加注重與各行業的深度融合。隨著產品持續迭代,將不斷提升對 ROS 2 等行業框架的支持。憑借良好的可擴展性,RealEvo-Stream 將進一步拓展至機器人、工業控制、智能交通等多個領域,為行業開發者提供高效、專業的開發支持。
如果你是
· 嵌入式開發者:無需關心操作系統差異,跨平臺應用一鍵適配,專注業務邏輯開發。
· 團隊技術主管:快速搭建技術棧高度兼容的多人協作開發環境,減少學習成本,助力團隊高效開發。
· 企業決策者:軟硬一體方案降低綜合成本,搶占市場先機。
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
操作系統
+關注
關注
37文章
7401瀏覽量
129278 -
開源
+關注
關注
3文章
4203瀏覽量
46122
原文標題:SylixOS 上如何開發 ROS 2 應用?RealEvo-Stream 助力機器人廠商完成項目落地
文章出處:【微信號:翼輝信息,微信公眾號:翼輝信息】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
RK3568J“麒麟”+“翼輝”國產系統正式發布,“鴻蒙”也正在路上!
翼輝信息聯合晶心科技推出AndesCore? A25系列RISC-V處理器
翼輝信息SylixOS與介方信息OpenSCA SRTF核心框架適配成功
成功搭載“翼輝國產實時系統SylixOS”,創龍科技T3國產平臺!


為 SylixOS 打造最強開發平臺!翼輝發布RealEvo 6.0 版本

翼輝信息已正式加入對申威SW64自主指令集架構的支持

翼輝信息驅動智慧水務新范式
翼輝信息推出全新開發環境RealEvo-Stream
翼輝信息SylixOS AI應用方案發布
翼輝信息SylixOS TSN解決方案助力用戶消除兩大難題
翼輝信息的智能化躍遷之路




 工商網監
工商網監
評論