") GraniStudio零代碼平臺(tái)軸復(fù)位算子支持多少個(gè)軸同時(shí)復(fù)位,有哪些回零模式?
GraniStudio零代碼平臺(tái)軸復(fù)位算子支持多少個(gè)軸同時(shí)復(fù)位,有哪些回零模式?

GraniStudio平臺(tái)在軸復(fù)位的功能上未對(duì)同時(shí)復(fù)位的軸數(shù)進(jìn)行硬性限制,理論上支持任意數(shù)量軸同步復(fù)位,需要考慮的是在做多軸同步復(fù)位時(shí)要評(píng)估機(jī)械安全風(fēng)險(xiǎn),建議提前確認(rèn)機(jī)械在多軸同時(shí)復(fù)位時(shí)是否會(huì)產(chǎn)生干涉,以免出現(xiàn)事故。
GraniStudio平臺(tái)復(fù)位模塊位于主任務(wù)設(shè)計(jì)器板卡控制欄,名稱為“軸復(fù)位”,在軸復(fù)位執(zhí)行邏輯上,平臺(tái)采用優(yōu)先級(jí)配置機(jī)制,通過(guò)直觀的界面化操作即可完成設(shè)置,可自定義每個(gè)軸的復(fù)位優(yōu)先級(jí)(數(shù)值越小優(yōu)先級(jí)越高),當(dāng)多個(gè)軸優(yōu)先級(jí)相同時(shí),系統(tǒng)將執(zhí)行同步復(fù)位。
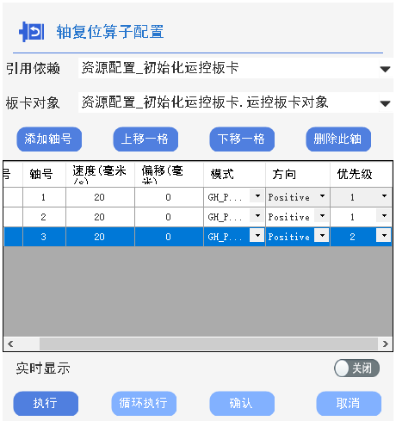
例如,將軸 1 和軸 2 的優(yōu)先級(jí)均設(shè)為 1,則二者將同時(shí)啟動(dòng)復(fù)位;若軸 3 優(yōu)先級(jí)設(shè)為 2,則軸 1、軸 2 復(fù)位完成后,軸 3 才開(kāi)始執(zhí)行復(fù)位。這種靈活的優(yōu)先級(jí)配置,既支持多軸協(xié)同復(fù)位,又能避免因同時(shí)動(dòng)作引發(fā)的潛在風(fēng)險(xiǎn),滿足不同場(chǎng)景下的設(shè)備復(fù)位需求。
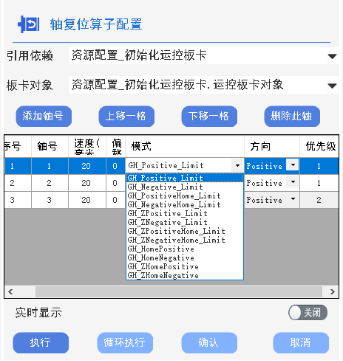
在復(fù)位方法上,平臺(tái)提供了豐富且專業(yè)的 12 種回零模式,全面覆蓋各類工業(yè)場(chǎng)景需求。其中 6 種基礎(chǔ)模式包括:
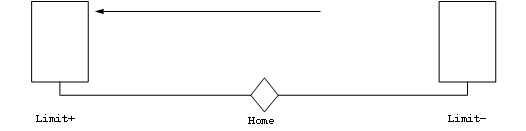
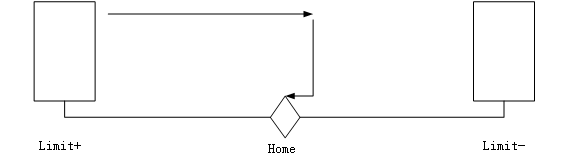
GH _Positive_ Limit:此模式以正限位為原點(diǎn),正限位回零是指軸從當(dāng)前位置向正方向移動(dòng),直至觸發(fā)正限位開(kāi)關(guān),然后反向低速移動(dòng)至原點(diǎn)開(kāi)關(guān),最終確定機(jī)械零點(diǎn)位置的回零模式。此模式通過(guò)正限位開(kāi)關(guān)作為初始定位參考,結(jié)合原點(diǎn)開(kāi)關(guān)的精確定位,建立軸的絕對(duì)坐標(biāo)系。
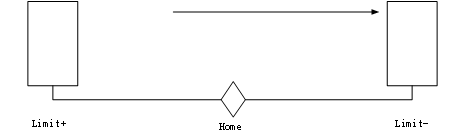
GH _Negative_ Limit:負(fù)限位回零與正限位回零相反,軸從當(dāng)前位置向負(fù)方向移動(dòng),觸發(fā)負(fù)限位開(kāi)關(guān)后,再正向低速移動(dòng)至原點(diǎn)開(kāi)關(guān),最終確定機(jī)械零點(diǎn)。其原理與正限位回零一致,但運(yùn)動(dòng)方向相反。
GH _HomePositive_ Limit和GH_HomeNegative_Limit:此模塊以正方向/負(fù)方向搜索原點(diǎn),搜到到原點(diǎn)信號(hào)即停止運(yùn)動(dòng),如果搜索不到會(huì)不停重復(fù)搜索,GH _HomePositive_ Limit和GH_HomeNegative_Limit回零依賴編碼器位置(軸初始化位置)。
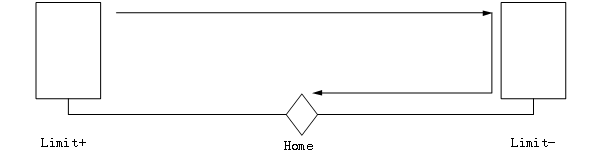
GH _PositiveHome_ Limit和GH_NegativeHome_Limit:此種回零方式為無(wú)論軸處于何種位置先尋找正限位開(kāi)關(guān)/負(fù)限位開(kāi)關(guān),搜索到限位開(kāi)關(guān)后到再沿著反方向?qū)ふ以c(diǎn)信號(hào),搜索到原點(diǎn)信號(hào)后軸停止運(yùn)行,確認(rèn)機(jī)械零點(diǎn)位置。使用GH _PositiveHome_ Limit和GH_NegativeHome_Limit回零模式尤其適用于對(duì)位置精度、設(shè)備安全性要求較高的場(chǎng)景。
此外,平臺(tái)還支持上述 6 種模式對(duì)應(yīng)的帶 Z 向信號(hào)回零模式,Z 向信號(hào)通常來(lái)自編碼器等反饋設(shè)備,能提供更精準(zhǔn)的位置校準(zhǔn)參考,在需要高精度回零的場(chǎng)景,如精密加工、半導(dǎo)體制造中,帶 Z 向信號(hào)的回零模式可顯著提升回零精度與可靠性。
需要注意的是軸復(fù)位算子在6.4版本棄用了回零方向的選擇,不需要進(jìn)行配置。
審核編輯 黃宇
-
編碼器
+關(guān)注
關(guān)注
45文章
4006瀏覽量
143222
發(fā)布評(píng)論請(qǐng)先 登錄
總線驅(qū)動(dòng)器回零軸不運(yùn)動(dòng)原因及解決方法
測(cè)試小白3分鐘上手,零代碼自動(dòng)化測(cè)試平臺(tái),15分鐘搭建自動(dòng)化測(cè)試方案

GraniStudio:?jiǎn)?b class='flag-5'>軸Jog運(yùn)動(dòng)例程

GraniStudio:?jiǎn)?b class='flag-5'>軸PTP運(yùn)動(dòng)例程

GraniStudio:獲取軸信息例程

GraniStudio:控制軸設(shè)置例程

GraniStudio:兩軸直線插補(bǔ)例程

GraniStudio:軸復(fù)位例程

零代碼自動(dòng)化測(cè)試平臺(tái)ATECLOUD功能詳解

GraniStudio : MC 協(xié)議深度剖析
GraniStudio :MQTT 協(xié)議的深度剖析
GraniStudio : TCP/IP(Socket)協(xié)議深度剖析

低代碼開(kāi)發(fā)云平臺(tái)是什么?零編程零成本搭建
什么是零代碼平臺(tái)?
GraniStudio零代碼平臺(tái)支持哪些品牌PLC和協(xié)議?



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論