 為控制Mercury X1和Mercury B1機械臂而設計的創新外骨骼
為控制Mercury X1和Mercury B1機械臂而設計的創新外骨骼

今天,我們將介紹一款專為控制 Mercury X1 和 Mercury B1 機械臂而設計的創新外骨骼。這種外骨骼以人類手臂的結構為藍本,可實現直觀和精確的控制。
開發這種外骨骼的動機源于人們對深度學習和機器學習等領域日益增長的興趣。這些技術使機器人能夠自主學習和執行人類任務,例如折疊衣服或做飯。為了實現這些功能,必須收集大量數據,并且必須采用一種便捷的方式來控制機械臂。設計這種外骨骼的主要目標是滿足這一需求。
項目硬件介紹
大象機器人 Mercury X1
M5Stack ESP32 基礎核心物聯網開發套件
NVIDIA Jetson Orin Nano 開發者套件
ROS 機器人操作系統
Elephant Robotics myCobot Pro 自適應夾爪
產品介紹
Mercury X1
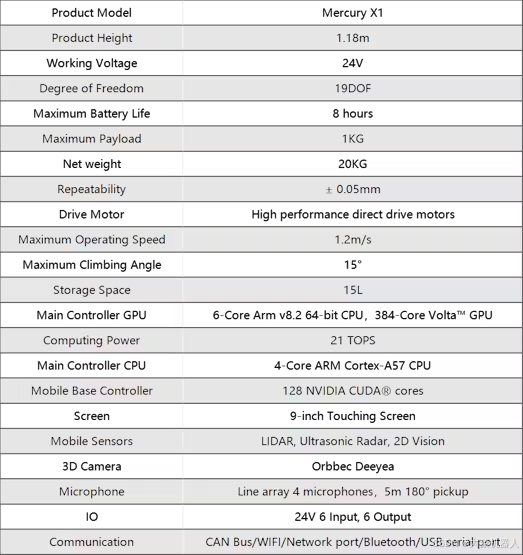
Mercury X1 由 Elephant Robotics 開發,是一款先進的人形機器人,旨在處理各種自動化任務。它擁有 19 個 DOF(每臂 7 個 DOF),在手術過程中提供了卓越的靈活性和適應性。Mercury X1 采用由高性能直驅電機驅動的輪式移動底座,確保在復雜環境中穩定移動,電池續航時間長達 8 小時。Mercury X1 配備了由 NVIDIA Jetson Xavier 提供支持的高性能主控制器系統,支持視覺測距、傳感器融合、定位和建圖、障礙物檢測和路徑規劃的復雜算法。移動底座配備了 LiDAR、超聲波傳感器和 2D 視覺系統,可實現高度感知的環境交互。
外骨骼
這款創新的外骨骼專為遠程控制和數據收集而設計。其結構由 2 個以人體解剖結構為藍本的手臂組件組成,并與 Mercury X1 的雙臂運動結構保持一致,可以精確模仿人類手臂運動。中心嵌入了一個 M5Stack Basic 模塊,作為主控單元,提供強大的計算能力和靈活的接口。外骨骼旨在提供舒適的佩戴體驗,同時確保高精度的運動跟蹤和數據收集,以支持機器人操作和機器學習訓練。
開發挑戰
初始設計限制
第一代外骨骼安裝在操作員的肩膀上。雖然這種設計看起來很有效,但在實際操作中被證明很麻煩。用戶必須顯著抬高手臂和肘部才能正確控制 Mercury X1,從而導致不適和效率低下。
電源和連接問題
初始版本需要直接連接到充電器,因此需要三到四根電纜連接到設備。這種設置創造了一個錯綜復雜的工作空間。
操作員疲勞
使用外骨骼的物理壓力在操作僅 5 分鐘后就變得明顯,導致用戶迅速疲勞。這些缺點突出了進行大量升級的必要性,并導致了改進版本的開發。
最新升級
我們目前的設計已經解決了之前的大部分痛點。新的外骨骼具有懸掛在胸部前方的手臂,并通過中心桿連接,確保兩側之間的平衡。以前對外部電源的依賴已被中央 M5Stack Basic 模塊中的內置可充電電池所取代。這消除了對多個拖曳充電器的需求,從而顯著減少了雜亂。現在,只需一根電纜即可將 M5Stack Basic 連接到 Mercury X1,從而高效傳輸數據并簡化設置。
實現細節
● 操作系統:Ubuntu 20.04
● 編程語言:Python
● 使用的庫:pymycobot、threading、time、serial
該程序的工作原理是從外骨骼上的磁性編碼器讀取數據,將電位值轉換為機械臂可以解釋和執行的角度。盡管代碼不到 100 行,但該程序實現了控制機械臂的基本功能。
def read_data(): while True: try: # read left robot data ser.write(hex_array_l) time.sleep(0.01) count = ser.in_waiting data = ser.read(count).hex() tim = time.time() #print("l:"+data+","+str(tim)) if len(data) == 84 and data[0:2] == "d5" and data[-2:] == "5d": for i in range(7): data_h = data[8 + i * 10: 10 + i * 10] data_l = data[10 + i * 10: 12 + i * 10] encode = int(data_h + data_l, 16) # l_angle_list[i] = (encode - 2048) * 180 / 2048 if encode != 2048 else 0 if encode == 2048: angle = 0 elif encode < 2048: angle = -180 * (2048 - encode) / 2048 else: angle = 180 * (encode - 2048) / 2048 l_angle_list[i] = angle button = bin(int(data[-10: -8]))[2:].rjust(4, "0") l_atom_list[0] = int(button[1]) l_atom_list[1] = int(button[2]) l_atom_list[2] = int(data[-6: -4], 16) l_atom_list[3] = int(data[-4: -2], 16) print("Left Arm Angles:", l_angle_list)基于此基本設置,可以記錄特定運動期間的關節參數并用于訓練機器學習模型,從而有助于為后續算法開發收集有價值的數據。
展望
展望未來,我們設想通過觸覺反饋和自適應運動算法等高級功能來增強外骨骼,以進一步彌合人類控制和機器人精度之間的差距。這些改進將為操作員提供更身臨其境的體驗,提供實時傳感反饋,并允許在操作過程中進行更直觀的調整。此外,我們計劃擴展外骨骼的兼容性,以便與更廣泛的機器人平臺配合使用,從而在制造、醫療保健和研究等各個行業實現更廣泛的應用。這一進展將支持更廣泛的數據收集,并促進可以處理日益復雜任務的協作人機系統。
-
機器人
+關注
關注
213文章
31310瀏覽量
223342 -
Mercury
+關注
關注
0文章
5瀏覽量
7566 -
機械臂
+關注
關注
14文章
599瀏覽量
26176 -
大象機器人
+關注
關注
0文章
86瀏覽量
402
原文標題:利用外骨骼控制 Mercury X1案例發布!以更靈活的方式操作你的機器人
文章出處:【微信號:ElephantRobotics,微信公眾號:大象機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
深入解析Atmel AVR XMEGA B1微控制器:特性、應用與設計要點
全場景多語言同傳,時空壺X1定義專業同傳終端新標準

探索 EZ - PD? PMG1 - B1:高性能 USB Type - C 降壓 - 升壓控制器
網線光纖有低煙無鹵阻燃b1級嗎

帶增益的 RX 分集 FEM(B26、B8、B20、B1/4、B3 和 B7) skyworksinc

從機械傳動到智能協同,雅特力助力外骨骼機器人應用創新發展

帶增益的 RX 分集 FEM(B3、B39、B1、B40、B41 和 B7) skyworksinc
Wandercraft借助NVIDIA技術開發個人外骨骼設備
外骨骼機器人爆火,到底是不是智商稅?
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
全新訊飛星火X1還有哪些升級
華為路由X1系列正式發布
具有載波聚合的 RX 分集 FEM(B26、B8、B20、B1/4、B3 和 B7) skyworksinc



 工商網監
工商網監
評論