 什么是 GNSS 杠桿臂,它在 GNSS/INS 傳感器融合算法中起什么作用?
什么是 GNSS 杠桿臂,它在 GNSS/INS 傳感器融合算法中起什么作用?

隨著 MTi-8和MTi-680(G) RTK GNSS/INS 的發布,Xsens 還引入了一個新的配置參數,稱為 GNSS 杠桿臂(Level Arm)。 GNSS 杠桿臂是獲得可靠的厘米級位置、速度和方向數據的基本參數。除了數據表中提供的信息外,本文還對 GNSS 杠桿臂進行了更深入的分析。
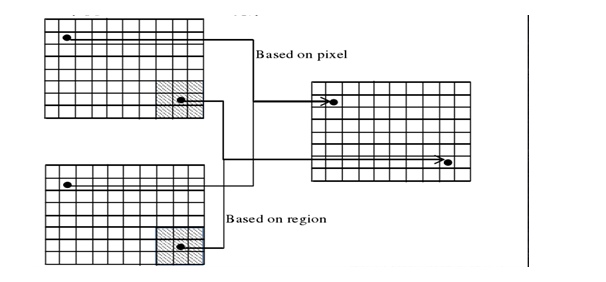
GNSS 杠桿臂設置考慮了 MTi(測量慣性數據的位置)與 GNSS 接收器天線位置之間的相對位置。將此信息提供給 MTi 將使傳感器融合算法庫能夠補償這兩個測量位置之間的動態差異。下圖可視化了這些動態差異::

如圖所示,MTi 位于系統的旋轉中心,例如汽車、機器人或無人機。 GNSS 天線安裝在同一車輛上,它與MTi的距離, 遠大于 GNSS 接收器的測量精度。當車輛旋轉時,MTi 保持在相同的全局位置并且只經歷一次旋轉。相反,GNSS 天線除了旋轉外還經歷線性位移。
向 MTi 提供此杠桿臂信息有兩個主要原因:
知道這個確切的偏移量允許 MTi 的傳感器融合算法庫轉換 GNSS 接收器數據,使其與慣性測量數據的動態相匹配。不正確的杠桿臂設置可能導致未定義的狀態估計,進而導致傳感器融合算法的性能下降,例如位置、速度和方向的錯誤估計。以上圖為例,它可以造成這樣的情況:MTi 根據 GNSS 數據“認為”車輛正在移動,而實際上它只是圍繞其軸旋轉。
將從 MTi 生成的位置輸出數據中減去杠桿臂。因此,位置數據將指示 MTi 的位置,而不是 GNSS 天線的位置。
GNSS接收器的定位精度與GNSS杠桿臂有什么關系?
對這個問題的簡短回答是,隨著 GNSS 測量精度的提高,GNSS 杠桿臂變得更加重要。再次考慮上一段中用于可視化 GNSS 杠桿臂的圖像。三個測量之間的位移(“路徑”)由 GNSS 接收器清楚地確定,因為它具有足夠的測量精度。現在考慮相同的實驗,但使用測量精度僅為 1 米(而不是 1 厘米)的 GNSS 接收器。三個連續的測量結果不夠準確,無法確定 GNSS 天線的路徑。基于三個測量和有限的測量精度,我們甚至不能肯定地說天線已經移動了。在這種情況下,GNSS 杠桿臂不會發揮重要作用,并且被 MTi 忽略。
GNSS 杠桿臂的重要性不僅取決于 GNSS 測量的準確性; GNSS 杠桿臂的長度也有影響。考慮一艘大型海上船只,其船體中心安裝了 MTi-G-710,天線安裝在 MTi 上方 10 米的桅桿頂部。如果船舶經歷強烈的橫滾和俯仰動態,那么安裝在桅桿上的天線將經歷線性位移,即使使用精度較低的 GNSS 接收器也可以觀察到。在這種情況下,向融合算法庫提供 GNSS 杠桿臂信息可以提高 MTi 的性能。
目前,MTi-8和MTi-680(G) 是 MTi 產品組合中支持這種杠桿臂設置的產品,因為它的位置數據精確到厘米。 MTi-7、MTi-670 和 MTi-G-710 的傳感器融合算法假定 GNSS 天線的位置與 MTi 本身大致相同。
如何測量和保存 GNSS 杠桿臂?
GNSS 杠桿臂是用戶在安裝 MTi 后需要測量和保存的參數。它作為 X-Y-Z 坐標向量存儲在 MTi 的內存中,相對于 MTi 傳感器坐標系的原點*。單位是米,但如果可能,應以厘米級精度確定杠桿臂。
注意:GNSS 杠桿臂的默認值為 [0, 0, 0] (m)。這意味著默認情況下,MTi 假定 MTi 及其 GNSS 天線位于同一位置!
下圖顯示了在 MTi 及其 GNSS 天線集成到汽車后如何測量 GNSS 杠桿臂的示例。 X-Y-Z 坐標應根據傳感器坐標系測量,該坐標系已印在 MTi 側面標簽上。 需要注意坐標的符號:如果天線安裝在 MTi 的右側,則 Y 坐標應為負值。
該車輛的最終 GNSS 杠桿臂矢量為 [1.00, 0.50, 0.80] (m)。

可以使用 MT Manager中的設備設置(Device Settings)窗口或使用 setGnssLeverArm 低級通信命令設置和保存 GNSS 杠桿臂。
如果 MTi-8或MTi-680(G) 未與被跟蹤的物體對齊,可以應用傳感器對齊矩陣 (RotSensor) 來彌補這一點,請注意仍應根據原始傳感器坐標系(印在 MTi 的側面標簽上)輸入 GNSS 杠桿臂 。 GNSS 杠桿臂不受 RotSensor 矩陣的影響。
*可以在產品的數據表中找到 MTi 原點的確切位置。
不正確使用GNSS 杠桿臂的結果
GNSS 杠桿臂被認為是靜態偏移,這意味著 MTi 的傳感器融合算法假設相對距離(相對于 MTi 的傳感器坐標系)不隨時間變化。 向 MTi 提供不正確的杠桿臂參數,可能會導致 MTi 的位置、速度和方向數據輸出性能下降。
當 MTi 及其 GNSS 天線安裝在靈活(非剛性)的車輛或物體上時,可能會在一定程度上違背 GNSS 杠桿臂的工作原理。 在桌面測試期間也經常發生不正確的使用行為:例如,出于測試目的,將 MTi 連接到 PC 并將 GNSS 天線留在窗戶附近以實現 GNSS 固定解。 如果 MTi 本身移動或旋轉,GNSS 杠桿臂的工作原理將受到違背。

MTi-680G還配備了升級的配套軟件,與非RTK模塊相比,該軟件能夠顯著提升模塊的內部信號處理速度。通過將全球定位坐標與模塊的姿態、航向和速度輸出同步,MTi-680G可為任何載體設備提供多方位的定位和導航輸出,包括以最大輸出數據速率400Hz高速移動的無人機等設備。
這款支持RTK的模塊還提供以下功能:
對每個產品設備進行精確出廠校準
強大的抗磁干擾能力
自適應軟件運行,可在各類應用場景中優化性能
易于使用的免費MT Software Suite開發工具,便于加快集成到最終產品設計中的速度
Xsens的熱門MTi開發工具包,提供開箱即用的操作體驗
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2577文章
55170瀏覽量
792181 -
算法
+關注
關注
23文章
4786瀏覽量
98208 -
GNSS
+關注
關注
9文章
998瀏覽量
51209
發布評論請先 登錄
相關推薦
熱點推薦
傳感器數據融合算法python代碼
傳感器數據融合算法是一種將多個傳感器收集到的數據合并到一個一致和準確的表示中的技術。這種算法的目的是提高數據精確性和可靠性,從而增強對環境或
【TL6748 DSP申請】基于TMS320C6748的傳感器數據融合算法實現
申請理由:之前有使用過TI的DSP處理器,現在正好有個項目,準備采用TI的C6000系列DSP用于傳感器數據融合算法的實現。希望能夠通過申請,謝謝。項目描述:由于工業機器人的重復定位精度和絕對定位
發表于 09-10 11:13
姿態融合算法是什么
作者:Joy Yang1.什么是姿態融合算法簡單來說,姿態融合算法就是融合多種運動傳感器數據(一般需要3軸加速度, 3軸陀螺儀或者3軸地磁感應傳感器
發表于 07-19 06:47
何為多傳感器融合算法?常用的融合算法包括哪些
因為多傳感器的使用會產生大量需要處理的數據,因此通常通過融合算法來對數據進行優化。不同傳感器采集到的信息可能相互之間可能會不同甚至是有矛盾,使用融合算法可以幫我們弄懂如何保證系統能夠準
XSENS配備全新GNSS/INS模塊的新款堅固型MTi-670G
Xsens的MTi-670G是MTi600系列中配備了GNSS/INS的一款產品,能把IMU、VRU和AHRS提供的所有數據與定位數據相結合。GNSS/

多傳感器數據融合算法最關鍵的是
多傳感器數據融合是一個綜合處理多傳感器數據的過程,以提高對環境或目標的感知和解釋能力。在這個過程中,各種數據融合算法起著至關重要的
GNSS信號不穩定?測繪級GNSS+INS組合導航,一鍵解決難題
GNSS衛星刷新率低且信號容易受到遮擋或中斷,導致GNSS信號失鎖。GNSS+INS的組合導航系統可以彌補這些問題,且高精度的INS可以在GNSS
測繪級實力!GNSS+INS 重塑導航精度
傳感器,即使在 GNSS 信號減弱時也能提供不間斷的位置、姿態和速度數據。GNSS 與 INS 相結合,為那些對精度和連續性有嚴格要求的行業提供了一個無縫且可靠的解決方案。
革新精準導航:全球最精確的 GNSS/MEMS INS 系統
在關鍵任務中遇到GNSS信號不穩定或信號中斷的問題?**ER-GNSS/MINS-01** 來了——這是一款測繪級超高精度組合導航系統,結合了GNSS + MEMS
Xsens MTi AHRS 和 GNSS/INS汽車應用的最佳實踐
XsensMTiAHRS和GNSS/INS產品用于各種汽車應用,例如自動駕駛汽車、卡車、穿梭巴士和火車。XsensMTiGNSS/INS旨在使用融合的IMU和




 工商網監
工商網監
評論