") 創(chuàng)龍 瑞芯微 RK3588 國產(chǎn)2.4GHz八核 工業(yè)開發(fā)板—ROS2系統(tǒng)使用說明
創(chuàng)龍 瑞芯微 RK3588 國產(chǎn)2.4GHz八核 工業(yè)開發(fā)板—ROS2系統(tǒng)使用說明

前 言
本文檔主要介紹創(chuàng)龍科技TL3588-EVM評估板演示基于Debain的ROS系統(tǒng)(版本:ROS2 Foxy)使用說明,包括鏡像編譯、鏡像替換,以及ROS系統(tǒng)測試的方法。適用開發(fā)環(huán)境如下。
Windows開發(fā)環(huán)境:Windows 7 64bit、Windows 10 64bit
虛擬機:VMware16.2.5
Linux開發(fā)環(huán)境:Ubuntu20.04.664bit
U-Boot:U-Boot-2017.09
Kernel:Linux-5.10.160
Debian:Debian11
Docker:24.0.5
ROS:ROS2 Foxy
LinuxSDK:LinuxSDK-[版本號](基于rk3588_linux_release_v1.2.1_20230720)
ROS(Robot Operating System,下文簡稱"ROS")是一個適用于機器人的開源的元操作系統(tǒng)。它提供了操作系統(tǒng)應(yīng)有的服務(wù),包括硬件抽象,底層設(shè)備控制,常用函數(shù)的實現(xiàn),進程間消息傳遞,以及包管理。它也提供用于獲取、編譯、編寫、和跨計算機運行代碼所需的工具和庫函數(shù)。
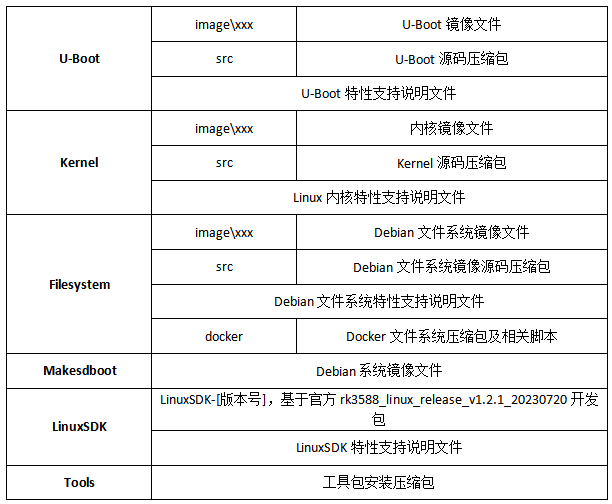
我司提供的ROS系統(tǒng)相關(guān)資料位于產(chǎn)品資料“4-軟件資料Demoplatform-demosros2_foxy”目錄下,具體說明如下表所示。
 表 1
表 1
我司提供的LinuxSDK-[版本號].tar.gz開發(fā)包已自帶Debian系統(tǒng),位于LinuxSDK源碼目錄下(如下圖)。
 圖 1
圖 1
請先按照調(diào)試工具安裝、開發(fā)環(huán)境搭建相關(guān)文檔,安裝SecureCRT串口調(diào)試終端、VMware虛擬機等相關(guān)軟件,按照《Debain系統(tǒng)使用手冊》解壓安裝LinuxSDK開發(fā)包至Ubuntu。
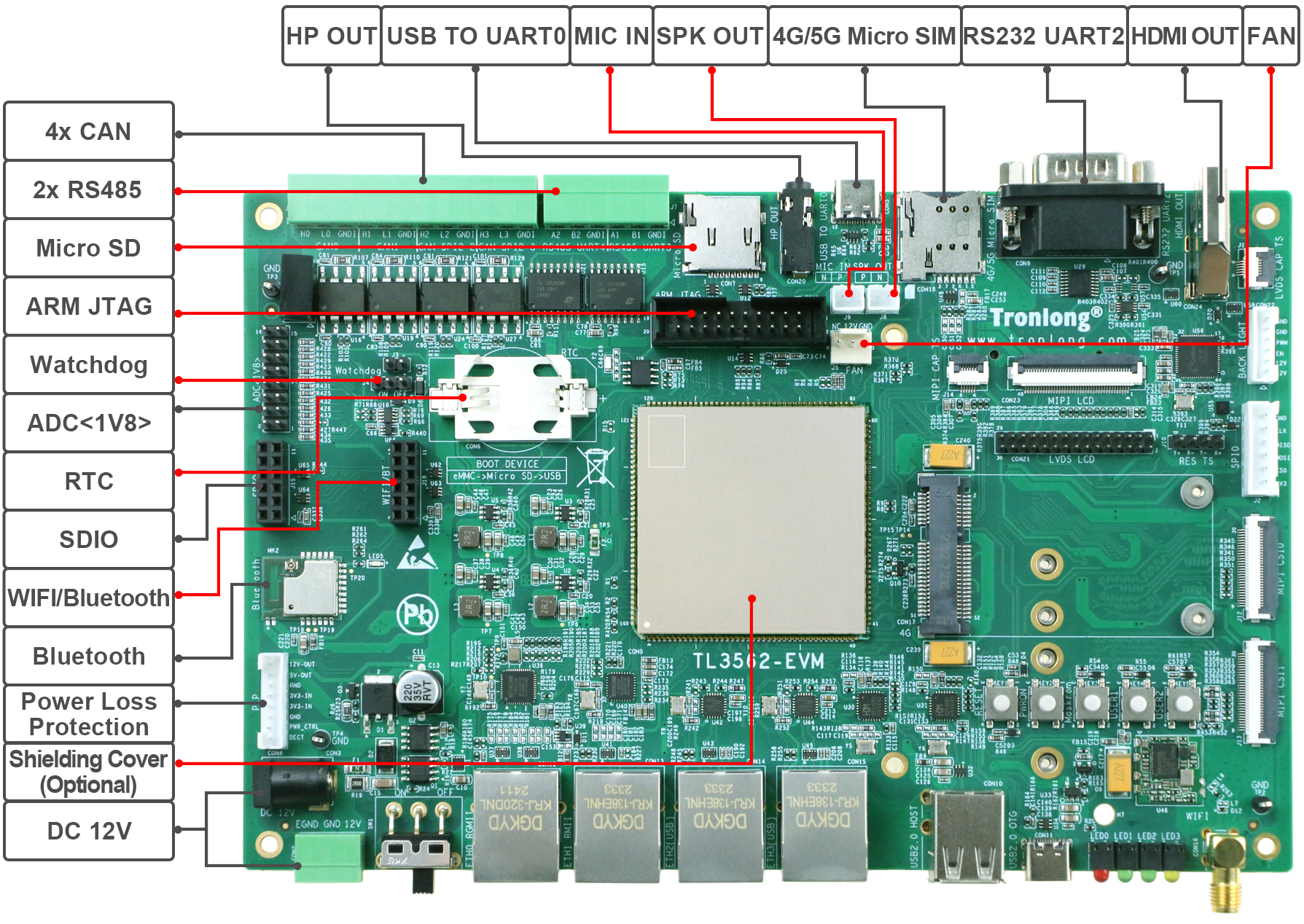
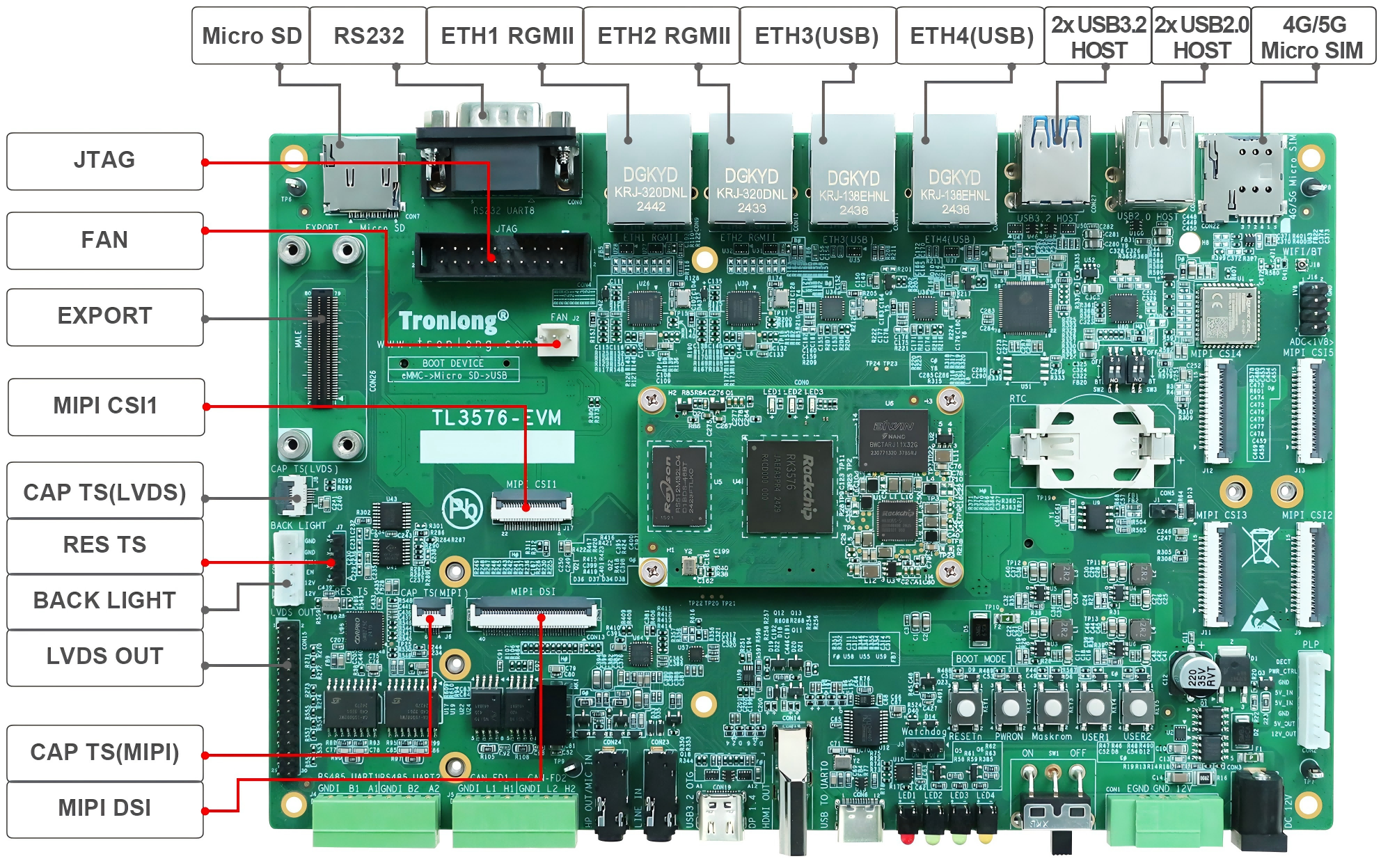
無特殊說明情況下,本文默認(rèn)使用USB TO UART2作為調(diào)試串口,使用SD啟動卡(Micro SD方式)啟動系統(tǒng),使用HDMI線將HDMI顯示器與評估板HDMIOUT接口連接,通過路由器與PC機進行網(wǎng)絡(luò)連接,請確保PC機、Ubuntu系統(tǒng)可正常訪問互聯(lián)網(wǎng)。
ROS系統(tǒng)測試
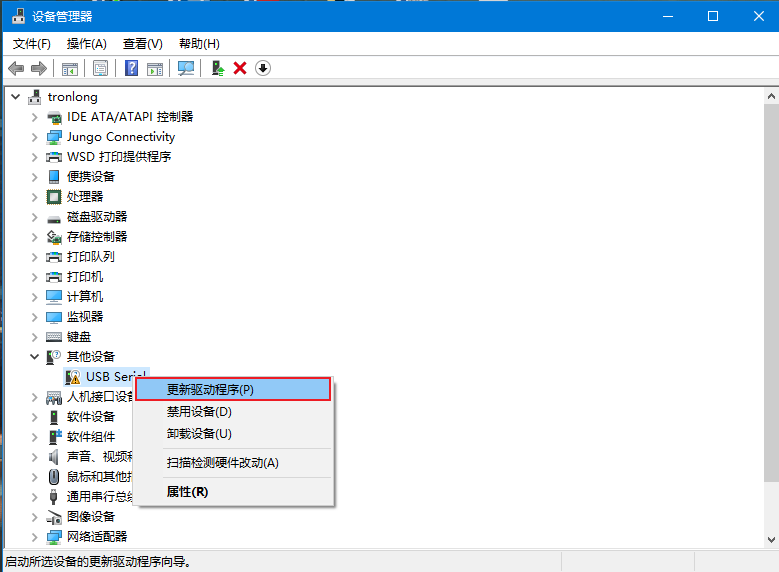
我司提供的ROS系統(tǒng)啟動鏡像文件update.img位于產(chǎn)品資料“4-軟件資料Demoplatform-demosros2_foxybin”目錄下,請先參考《系統(tǒng)啟動卡制作及系統(tǒng)固化》文檔,將鏡像文件update.img通過“瑞芯微創(chuàng)建升級磁盤工具”制作SD啟動卡(即ROS系統(tǒng)啟動卡),然后將SD啟動卡插至評估板Micro SD卡槽。亦可通過USB固化方式將系統(tǒng)固化至eMMC。
備注:目前暫不支持通過SD升級卡固化系統(tǒng)至eMMC方式。
執(zhí)行如下命令,配置評估板測試環(huán)境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh
 圖 2
圖 2
執(zhí)行如下命令,創(chuàng)建Log目錄,用于保存ROS程序運行的Log。
Target# mkdir -p /root/.ros/log
 圖 3
圖 3
執(zhí)行如下命令,啟動ROS節(jié)點訂閱消息。
Target# ros2 run demo_nodes_py listener &
 圖 4
圖 4
執(zhí)行如下命令,啟動ROS節(jié)點發(fā)布消息,實現(xiàn)訂閱消息節(jié)點與發(fā)布消息節(jié)點之間的通信。此時評估板串口調(diào)試終端將會打印兩節(jié)點間通信的信息,如下圖所示。按"Ctrl + C"可退出測試程序,即讓發(fā)布消息的節(jié)點退出。
Target# ros2 run demo_nodes_py talker
 圖 5
圖 5
執(zhí)行如下命令,查看并根據(jù)系統(tǒng)進程號關(guān)閉所有ROS節(jié)點。進程號請以實際情況為準(zhǔn)。
Target# ps -a
Target# kill 2835
Target# kill 2836
 圖 6
圖 6
基于C++的通信功能測試
執(zhí)行如下命令,配置評估板測試環(huán)境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh
 圖 7
圖 7
執(zhí)行如下命令,啟動ROS節(jié)點訂閱消息。
Target# ros2 run demo_nodes_cpp listener&
 圖 8
圖 8
執(zhí)行如下命令,啟動ROS節(jié)點發(fā)布消息,實現(xiàn)訂閱消息節(jié)點與發(fā)布消息節(jié)點之間的通信。此時評估板串口調(diào)試終端將會打印兩節(jié)點間通信的信息,如下圖所示。按"Ctrl + C"可退出測試程序,即讓發(fā)布消息的節(jié)點退出。
Target# ros2 run demo_nodes_cpp talker
 圖 9
圖 9
執(zhí)行如下命令,根據(jù)系統(tǒng)進程號關(guān)閉所有ROS節(jié)點。進程號請以實際情況為準(zhǔn)。
Target# ps -a
Target# kill 3539
Target# kill 3540
 圖 10
圖 10
小海龜測試
請使用HDMI線將HDMI顯示器與評估板HDMIOUT接口連接。然后執(zhí)行如下命令,配置評估板測試環(huán)境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh
圖 11
執(zhí)行如下命令,后臺運行小海龜程序。
Target# ros2 run turtlesim turtlesim_node &
 圖 12
圖 12
 圖 13
圖 13
執(zhí)行如下命令,發(fā)布話題消息,使小海龜轉(zhuǎn)圈。
Target# ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
 圖 14
圖 14
參數(shù)解析:
ros2 topic pub:發(fā)布消息到主題;
--rate 1:發(fā)布消息速率,設(shè)置為1次每秒;
/turtle1/cmd_vel:主題名稱;
geometry_msgs/msg/Twist:發(fā)布消息類型;
{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}:發(fā)布消息的內(nèi)容,線速度(linear)為x方向上的2.0、角速度(angular)為z軸方向上的1.8。
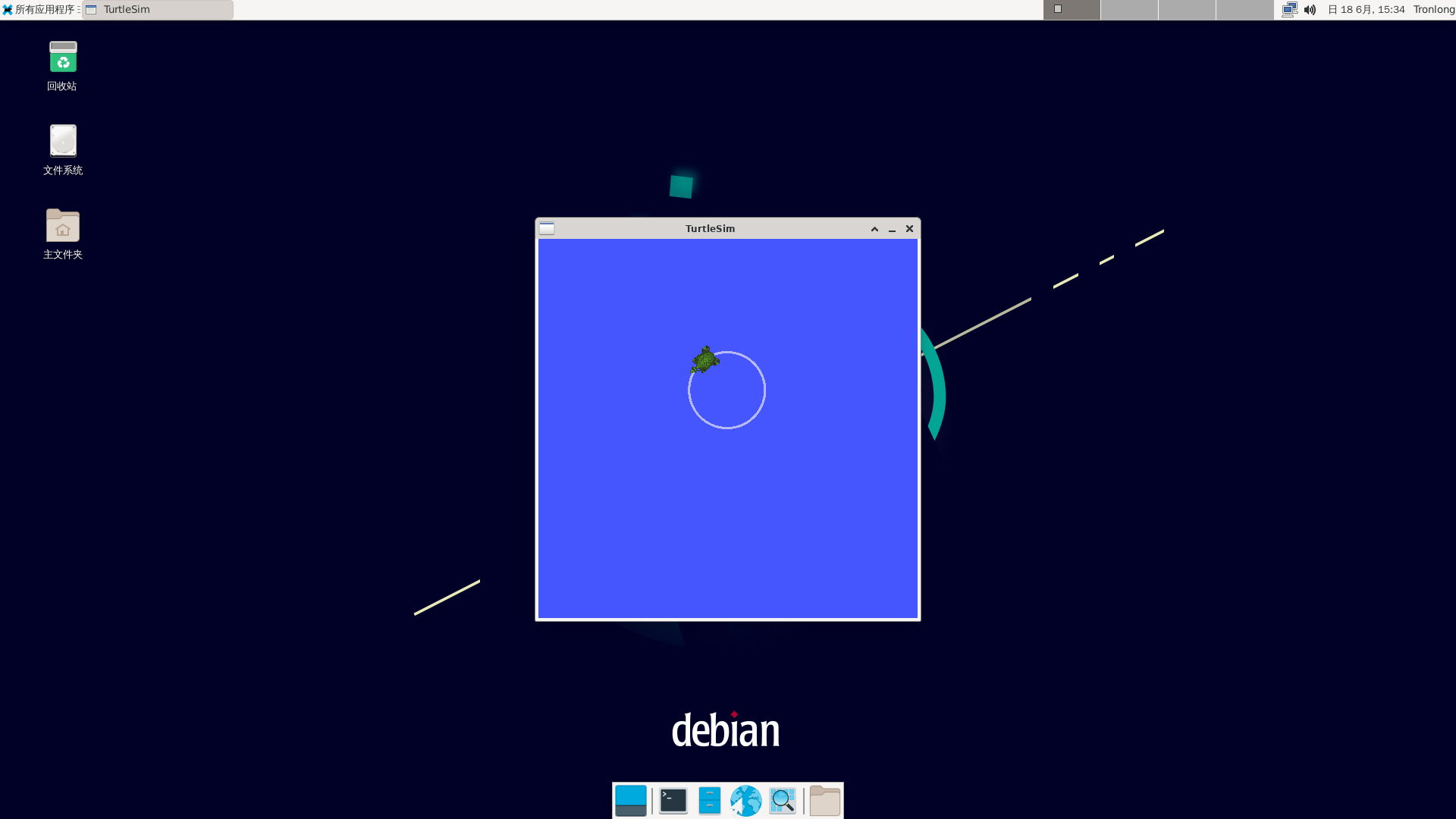 圖 15
圖 15
由于篇幅過長等原因,部分內(nèi)容均不逐一展示,如需獲取完整版詳細資料,請關(guān)注創(chuàng)龍科技微信公眾號或官網(wǎng),或者評論區(qū)留言,感謝您的支持!
審核編輯 黃宇
-
開發(fā)板
+關(guān)注
關(guān)注
26文章
6363瀏覽量
119919 -
RK3588
+關(guān)注
關(guān)注
8文章
576瀏覽量
7496
發(fā)布評論請先 登錄
瑞芯微 RK3588 平臺 Debian 系統(tǒng)開發(fā)案例與使用說明
創(chuàng)龍 瑞芯微 RK3588 國產(chǎn)2.4GHz八核 工業(yè)開發(fā)板—ISP圖像處理開發(fā)案例
創(chuàng)龍 瑞芯微 RK3588 國產(chǎn)2.4GHz八核 工業(yè)開發(fā)板—視頻圖像處理框架
創(chuàng)龍 瑞芯微 RK3588 國產(chǎn)2.4GHz八核 工業(yè)開發(fā)板—調(diào)試工具安裝
北京迅為itop-3588八核開發(fā)板瑞芯微NPU例程測試LPRNet車牌識別
迅為RK3588開發(fā)板Linux安卓麒麟瑞芯微國產(chǎn)工業(yè)AI人工智能
創(chuàng)龍 瑞芯微 RK3562 國產(chǎn) 2GHz 四核A53 工業(yè)開發(fā)板—IRIG-B碼對時案例
硬核上車!RK3576基于Ubuntu部署ROS機器人系統(tǒng)詳細攻略(上)

創(chuàng)龍瑞芯微 RK3562 國產(chǎn) 2GHz 四核A53 工業(yè)開發(fā)板—調(diào)試工具安裝
全國產(chǎn)!瑞芯微 RK3576 ARM 八核 2.2GHz 工業(yè)開發(fā)板—LVGL應(yīng)用開發(fā)案例



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論