電機(jī)分為發(fā)電機(jī)和電動(dòng)機(jī)兩類,馬達(dá)通常指?電動(dòng)機(jī)?,即利用電磁感應(yīng)原理將電能轉(zhuǎn)換為機(jī)械能的裝置,常見于起動(dòng)機(jī)、驅(qū)動(dòng)系統(tǒng)等場(chǎng)景。? 以下是關(guān)于馬達(dá)的詳細(xì)介紹: 1.基本原理 馬達(dá)的工作基于電磁感應(yīng)定律
2026-01-05 09:32:05 23
23 
,下面就為大家介紹其操作方法。(1)操作前準(zhǔn)備在開始操作前,要對(duì)汽車油箱氣密性檢漏進(jìn)行全面檢查。查看設(shè)備外觀是否有損壞,各個(gè)連接部件是否牢固,確保設(shè)備的電源或氣源正常
2025-12-30 11:48:32101 
隨著智能制造與物流自動(dòng)化浪潮的推進(jìn),AGV(自動(dòng)導(dǎo)引車)叉車作為倉(cāng)儲(chǔ)物流、智能制造場(chǎng)景中的核心搬運(yùn)設(shè)備,其應(yīng)用規(guī)模持續(xù)擴(kuò)大。據(jù)相關(guān)行業(yè)報(bào)告顯示,2024年全球AGV叉車市場(chǎng)規(guī)模突破150億美元
2025-12-29 14:17:3244 
射線的穿透和差別吸收成像,但存在用途、設(shè)計(jì)標(biāo)準(zhǔn)和安全要求等方面差異。基本原理設(shè)備通過X射線管發(fā)射高能X射線,射線穿透被測(cè)物體,不同材料會(huì)對(duì)X射線產(chǎn)生不同程度的吸收
2025-12-27 14:25:18120 
在智能工廠的物流線上,AGV(自動(dòng)導(dǎo)引車)正用機(jī)械臂般的精準(zhǔn)度搬運(yùn)著數(shù)噸重的貨物。當(dāng)傳統(tǒng)叉車需要駕駛員彎腰操作時(shí),舉升式AGV卻能通過毫米級(jí)精度的升降系統(tǒng),將貨架穩(wěn)穩(wěn)托起——這背后,是舉升機(jī)構(gòu)與負(fù)載
2025-12-24 17:05:47125 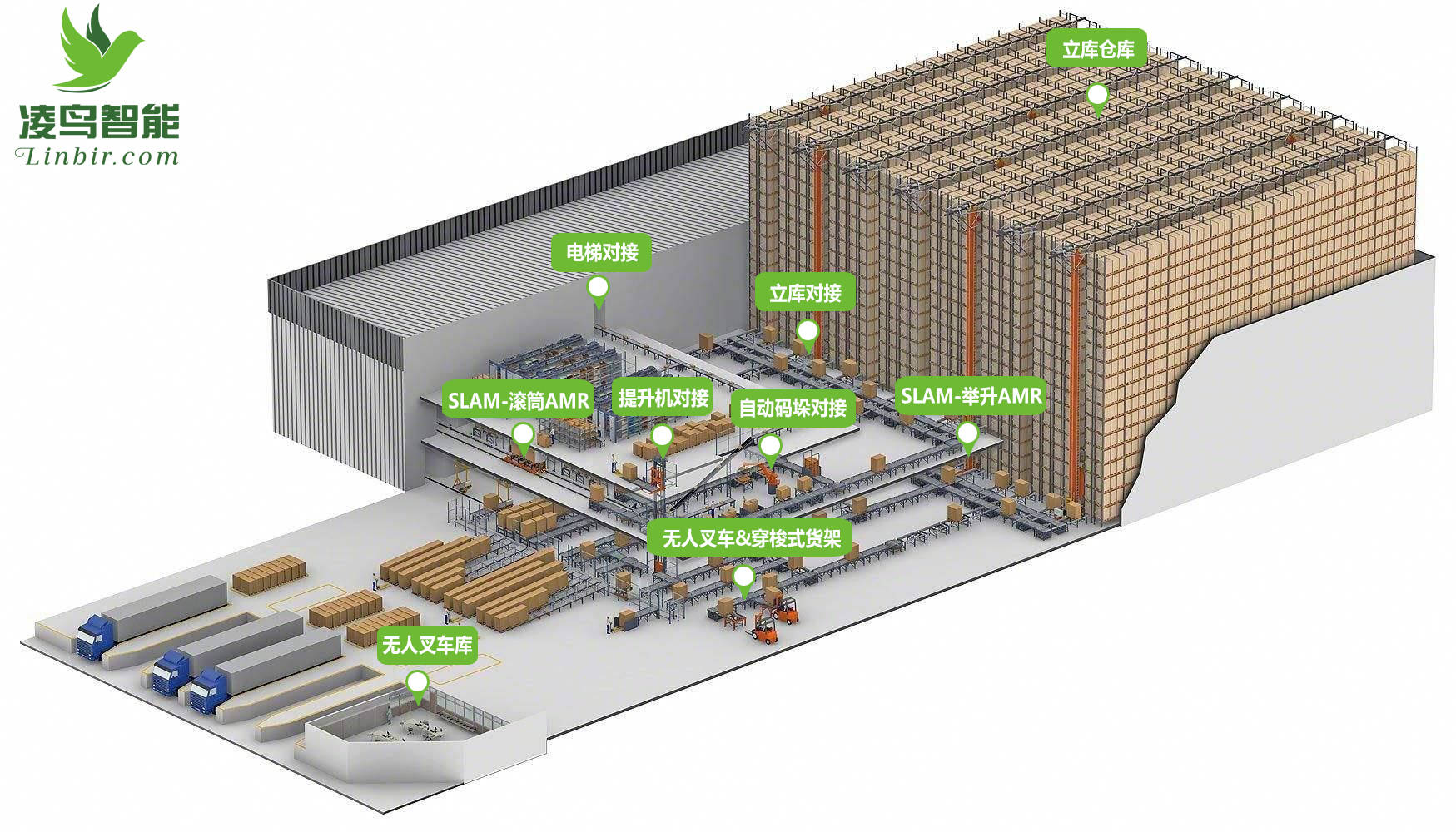
UWB 模組(BU 系列),倉(cāng)庫(kù)可以真正實(shí)現(xiàn)—— 托盤可視化、AGV 精準(zhǔn)調(diào)度、人員安全協(xié)同、貨位全流程監(jiān)控 。 倉(cāng)庫(kù)為什么必須要 UWB?(痛點(diǎn)很真實(shí)) 倉(cāng)儲(chǔ)現(xiàn)場(chǎng)變量太多:托盤堆高、貨架金屬多、叉車高速穿梭、AGV 來回調(diào)度…… 倉(cāng)儲(chǔ)管理真正
2025-12-03 09:56:52250 
進(jìn)行實(shí)時(shí)監(jiān)測(cè)與分析,從而實(shí)現(xiàn)對(duì)電纜及其附件進(jìn)行狀態(tài)評(píng)估和故障診斷。 常見電纜帶電檢測(cè)方法有紅外熱像檢測(cè)技術(shù)、局部放電檢測(cè)技術(shù)以及磁感應(yīng)檢測(cè)技術(shù)、電場(chǎng)感應(yīng)檢測(cè)技術(shù)等。如紅外熱像檢測(cè)技術(shù)應(yīng)用,主要是通過紅外熱像儀
2025-11-28 10:10:36284 
AGV以電池為動(dòng)力,裝備有電磁或光學(xué)等非接觸自動(dòng)導(dǎo)引裝置,能夠沿規(guī)定的導(dǎo)引路徑行駛,是具有安全保護(hù)以及各種移載功能的無人駕駛運(yùn)輸車。車體在軟件系統(tǒng)的控制下按導(dǎo)航規(guī)劃路徑和任務(wù)要求,精確地運(yùn)行到在指定
2025-11-24 17:04:07542 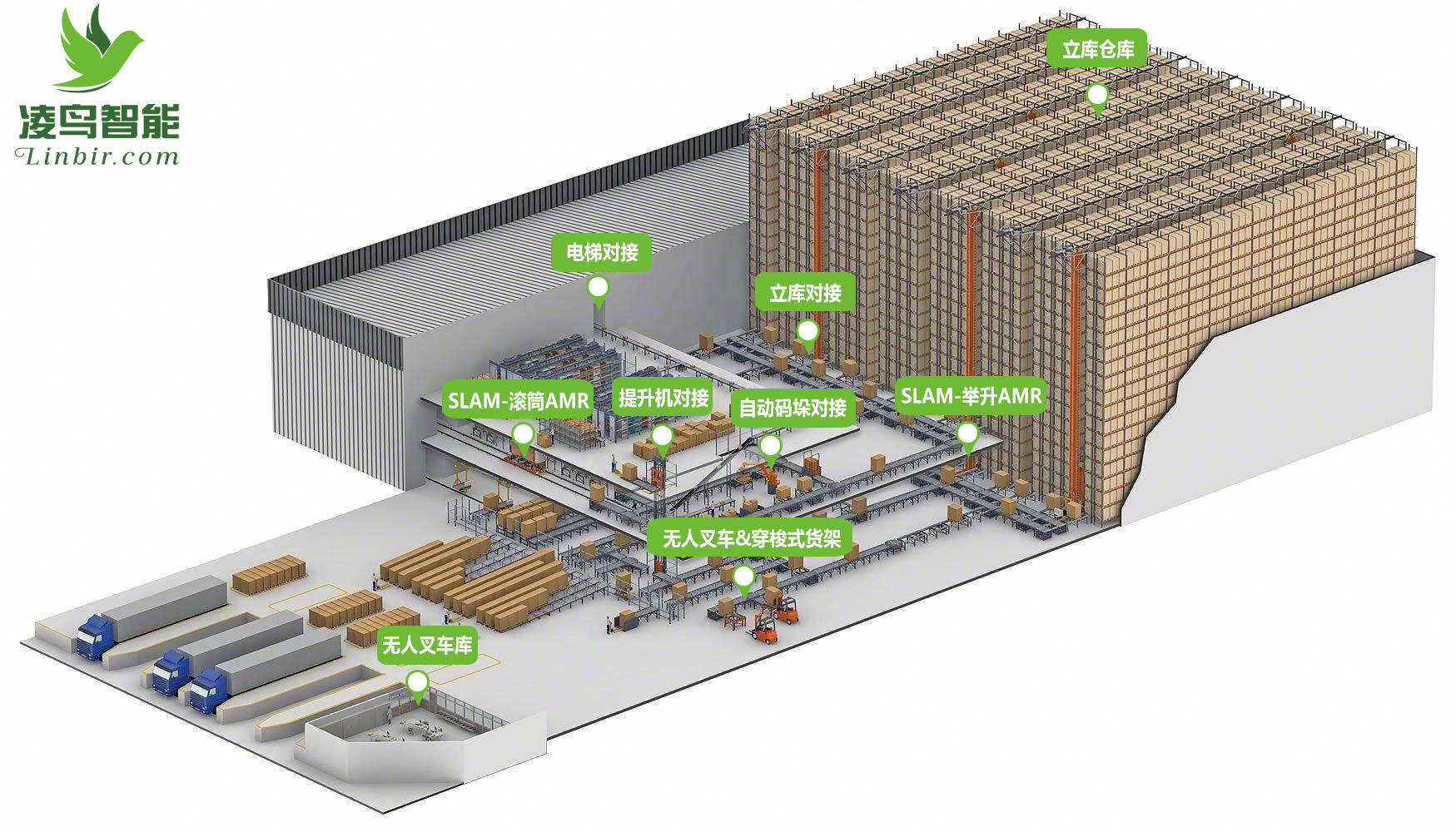
領(lǐng)域的核心導(dǎo)航技術(shù)。以下是提升 IGPS 定位精度的系統(tǒng)方法: 一、硬件系統(tǒng)優(yōu)化 1.? IGPS 基站布局優(yōu)化 多基站交叉覆蓋 :部署 4 個(gè)以上基站形成空間交叉覆蓋,確保 AGV 在任意位置至少有
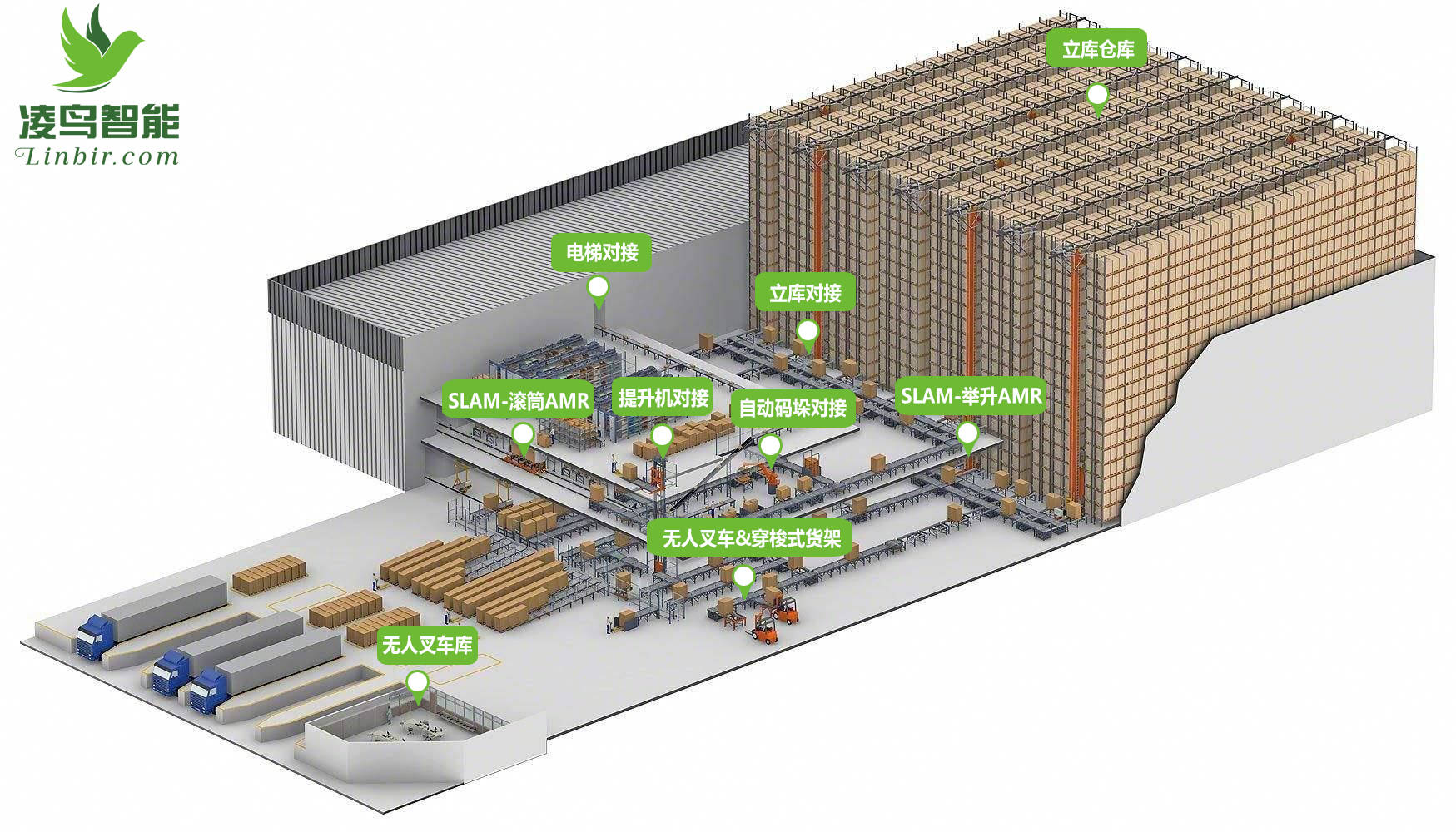
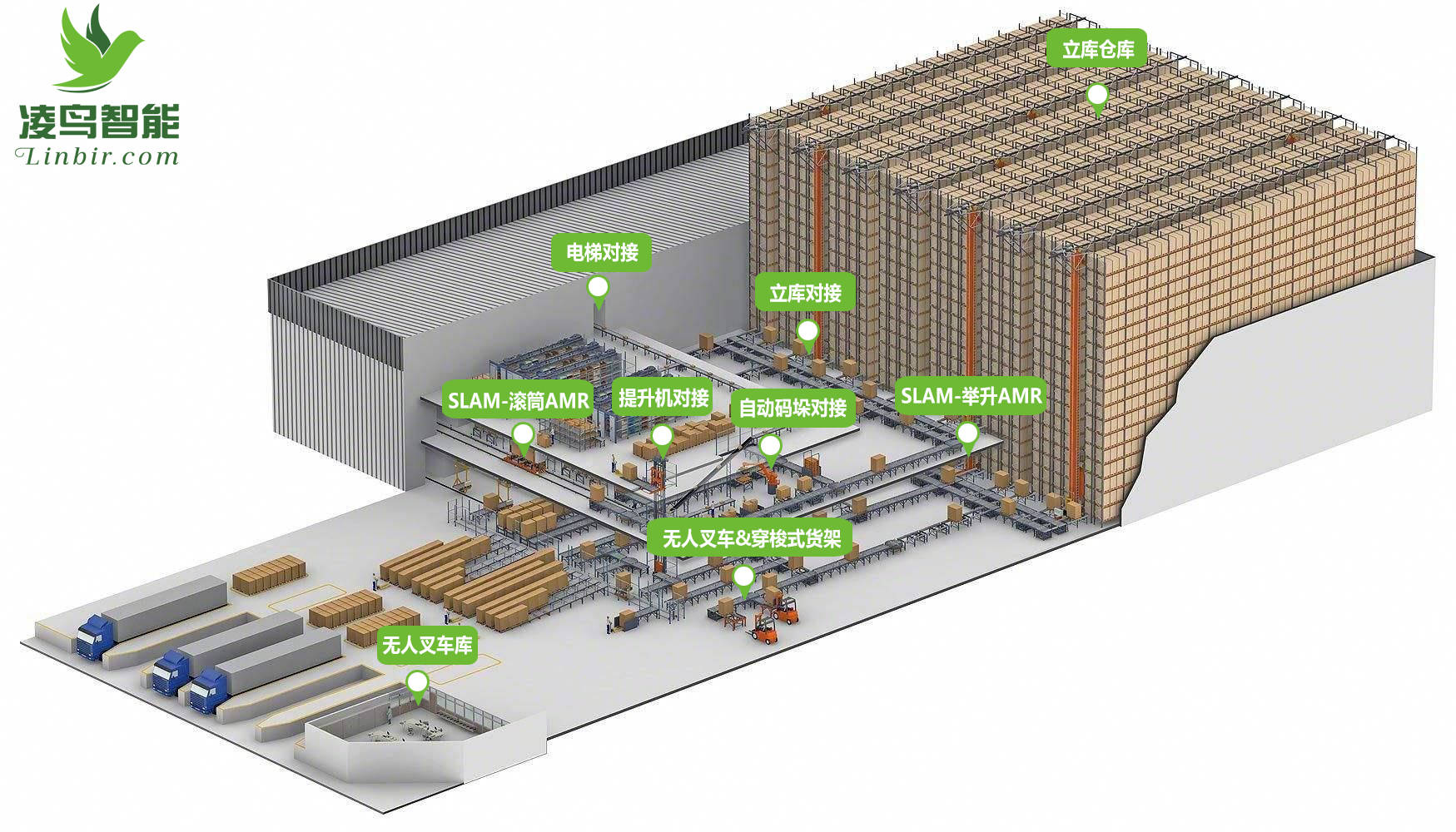
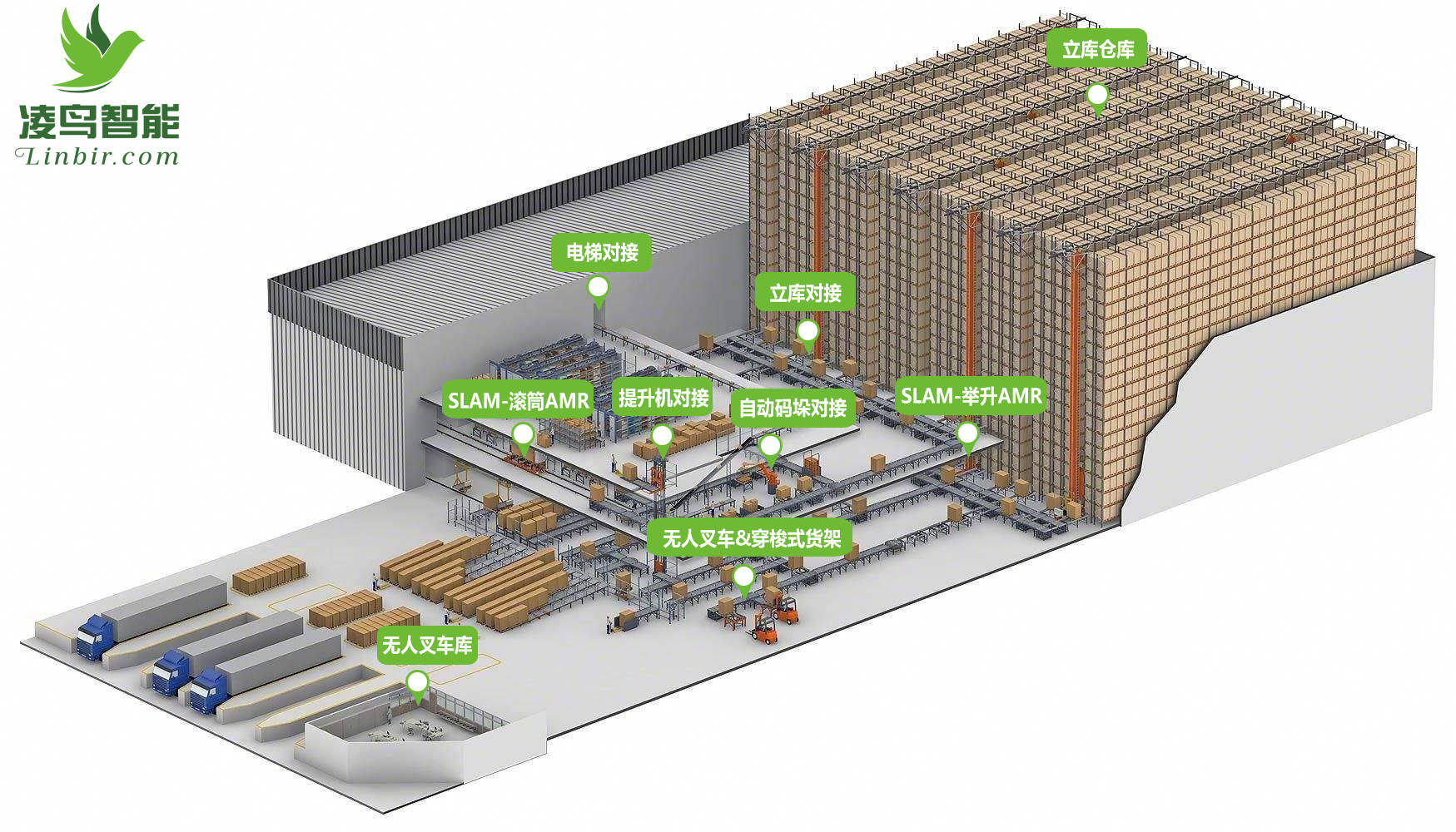
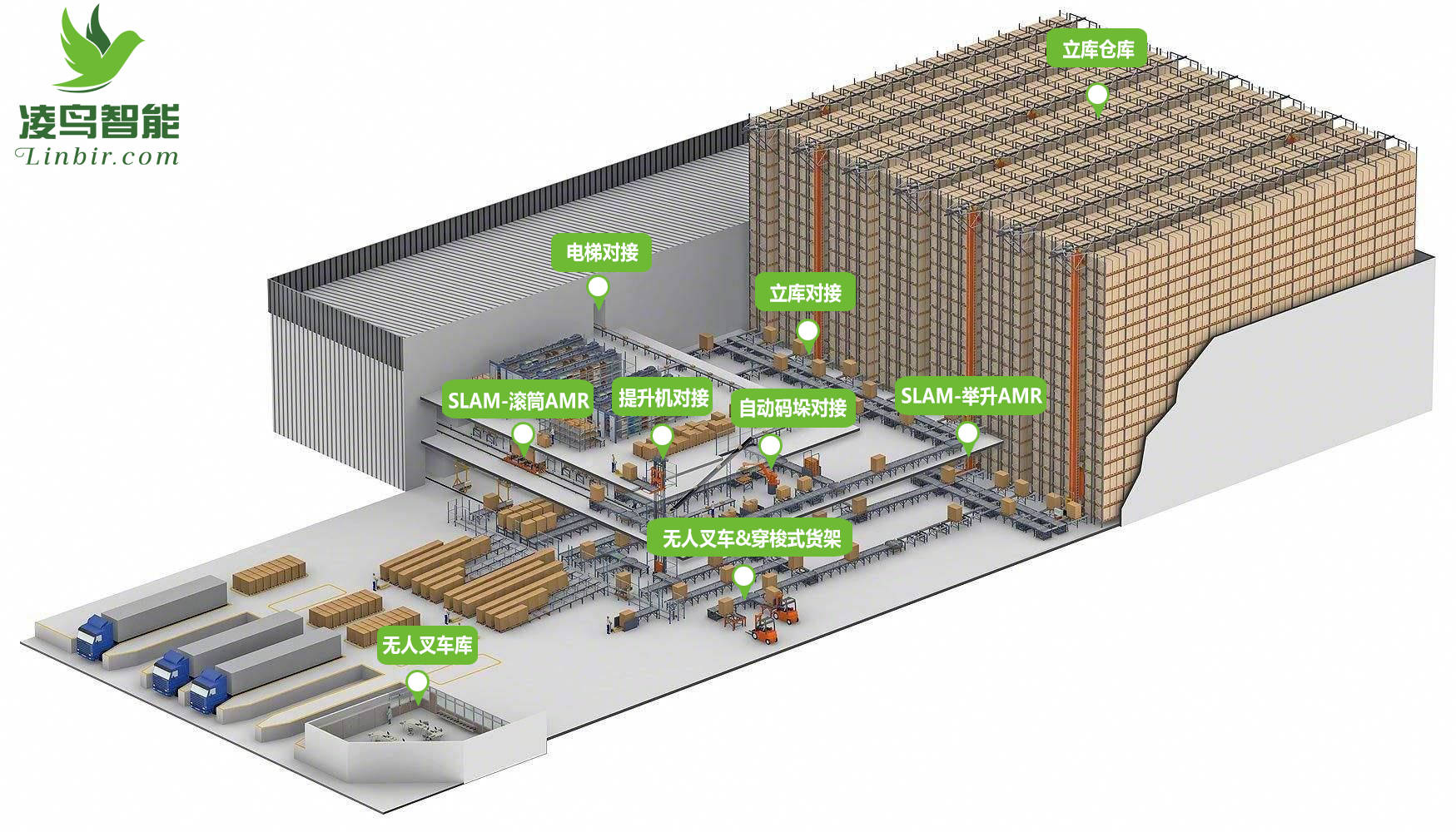
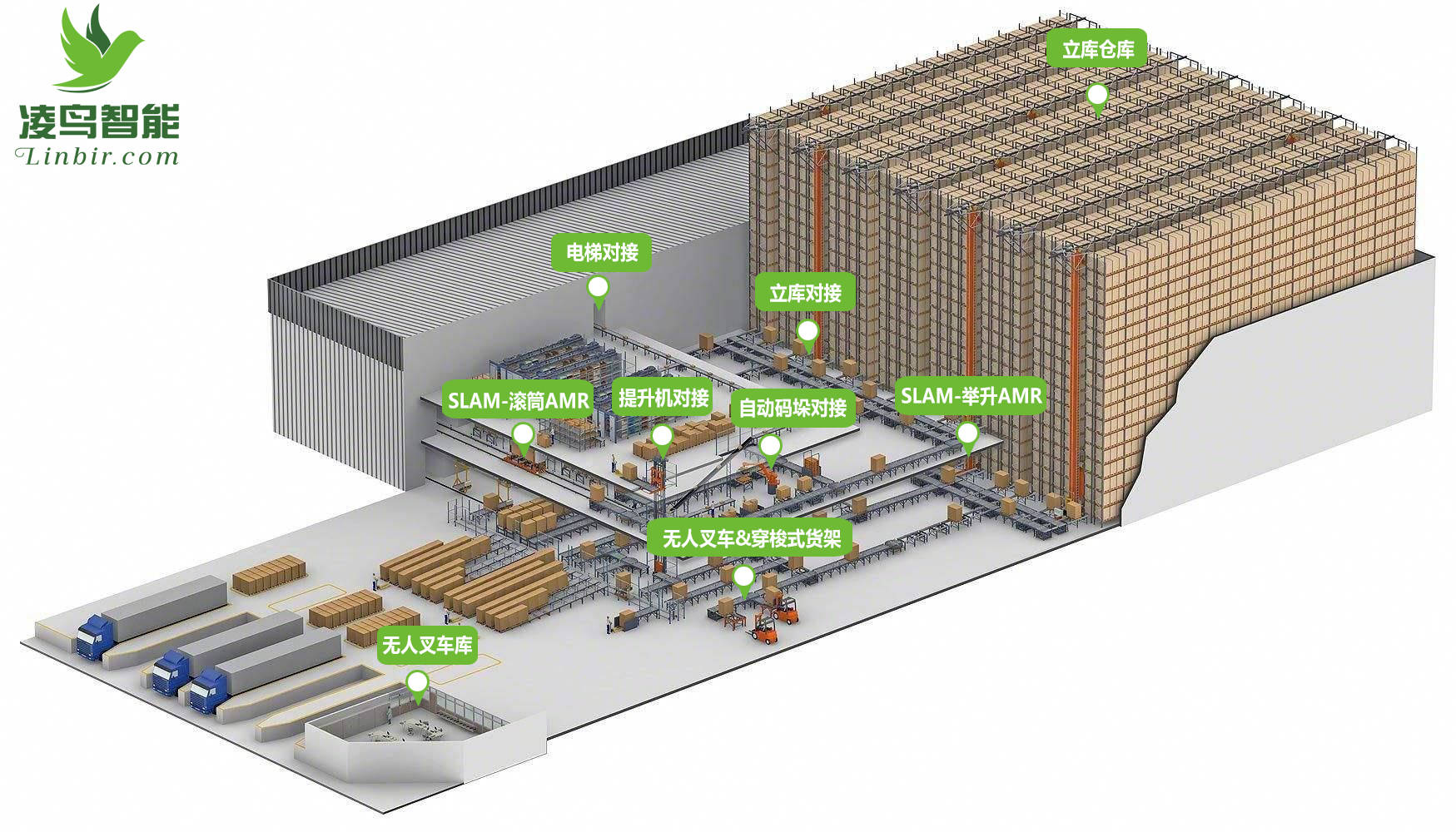
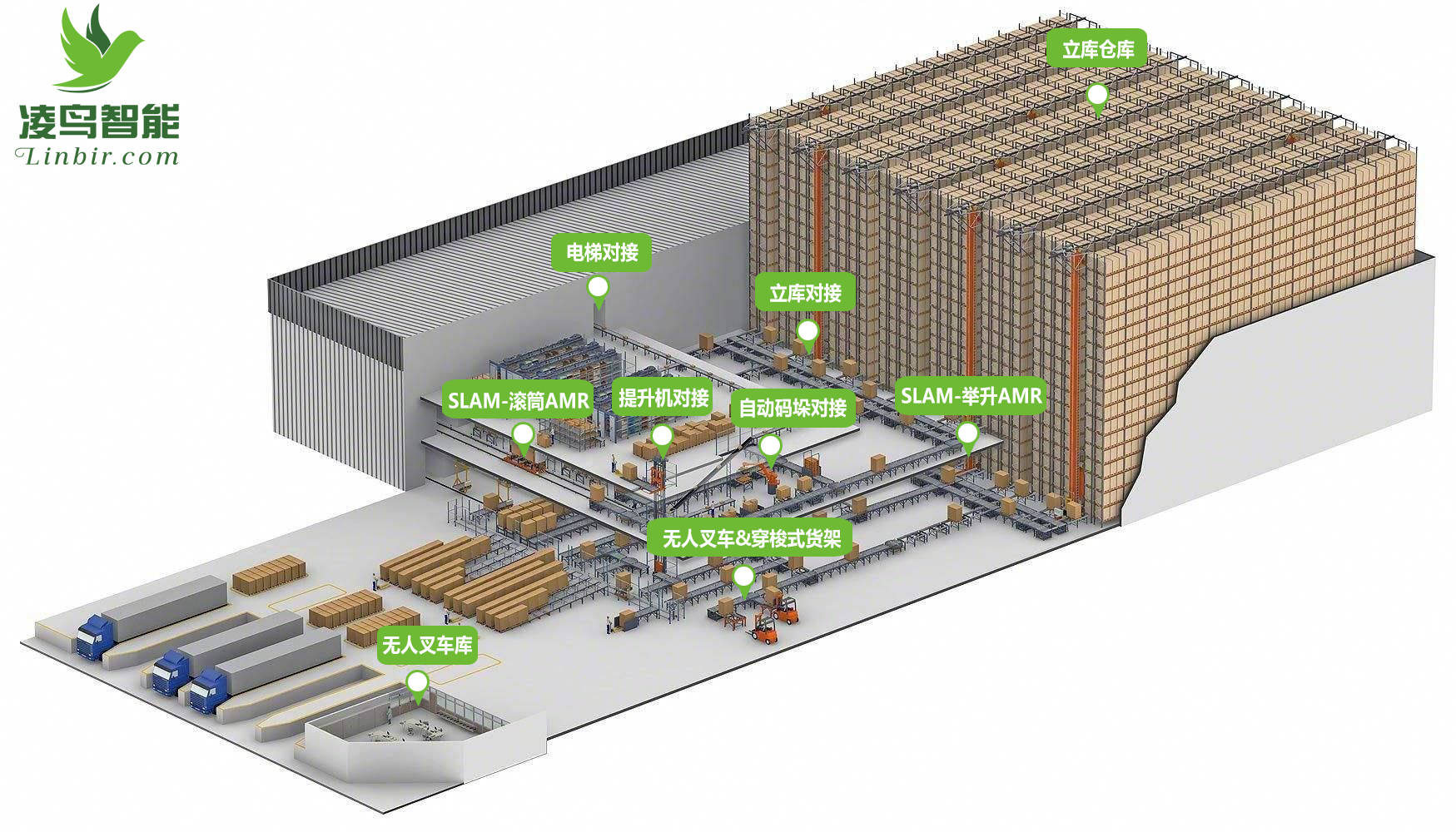
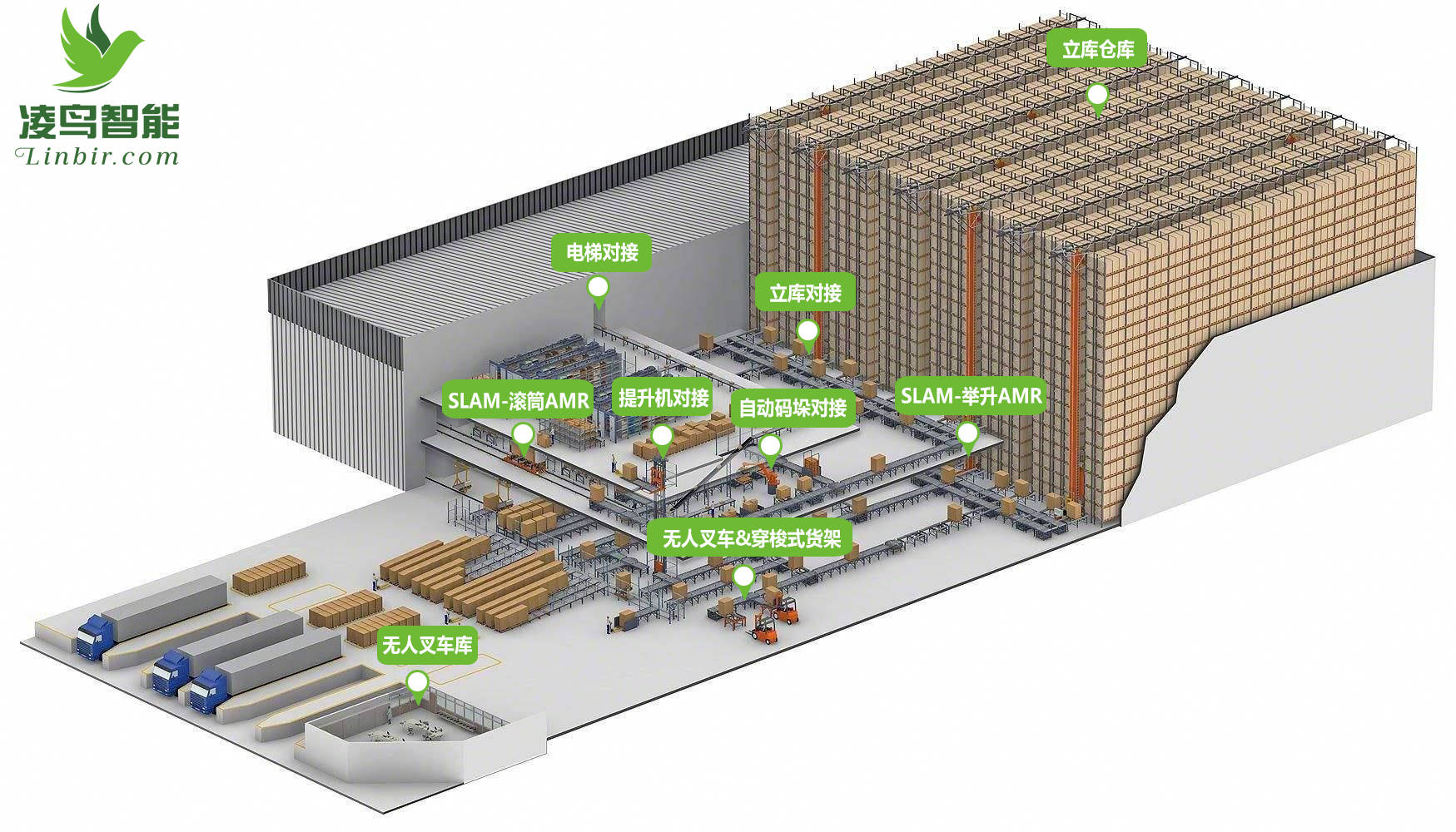
2025-11-21 11:07:24291 在當(dāng)今物流行業(yè)快速發(fā)展的背景下,AGV(自動(dòng)導(dǎo)引車)立庫(kù)作為智能倉(cāng)儲(chǔ)系統(tǒng)的核心組件,正以其高效、精準(zhǔn)、靈活的特性,成為企業(yè)提升物流效率、降低成本的關(guān)鍵利器。
2025-11-20 17:07:38423 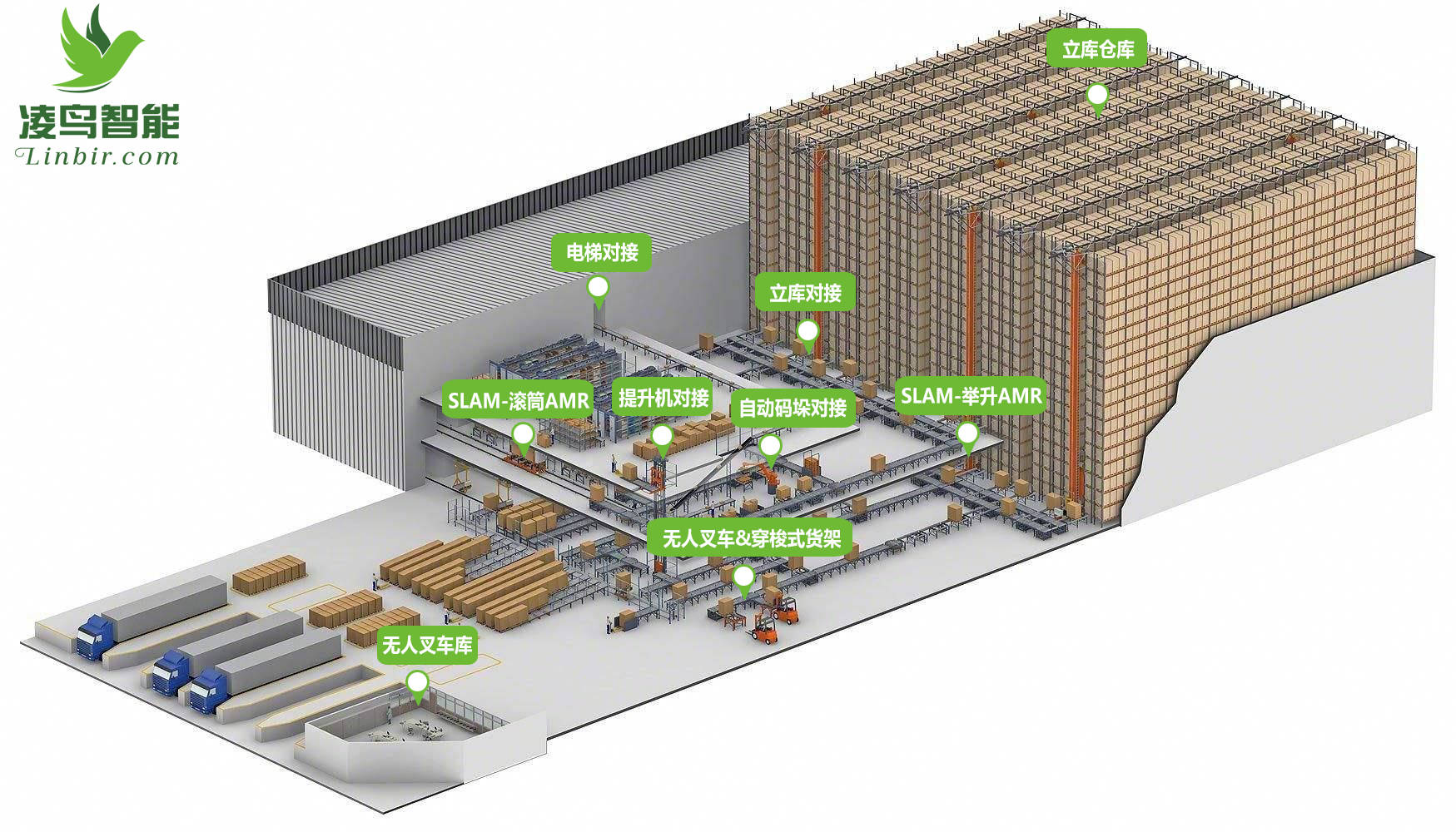
1. 應(yīng)用挑戰(zhàn) 在生產(chǎn)和倉(cāng)儲(chǔ)物流環(huán)節(jié)中,越來越多的自動(dòng)駕駛車輛和具有自主導(dǎo)航功能的自動(dòng)導(dǎo)引小車AGV被投入使用,裝卸過程變得更加自動(dòng)化。當(dāng)使用自動(dòng)叉車時(shí),我們需要將相應(yīng)的貨叉位置信息,準(zhǔn)確地反饋
2025-11-18 15:39:49507 你正在尋找的東西。 各個(gè)行業(yè)對(duì)AGV的采用率越來越高。根據(jù)《財(cái)富》商業(yè)觀察,2020年AGV全球市場(chǎng)規(guī)模為18.3億美元。據(jù)預(yù)測(cè),該市場(chǎng)將以9.3%的年復(fù)合增長(zhǎng)率增長(zhǎng),到2028年達(dá)到37.2億美元。 AGV倉(cāng)儲(chǔ)物流 AGV的種類 AGV車型種類繁多,根據(jù)不同的分類標(biāo)準(zhǔn),
2025-11-14 17:01:161031 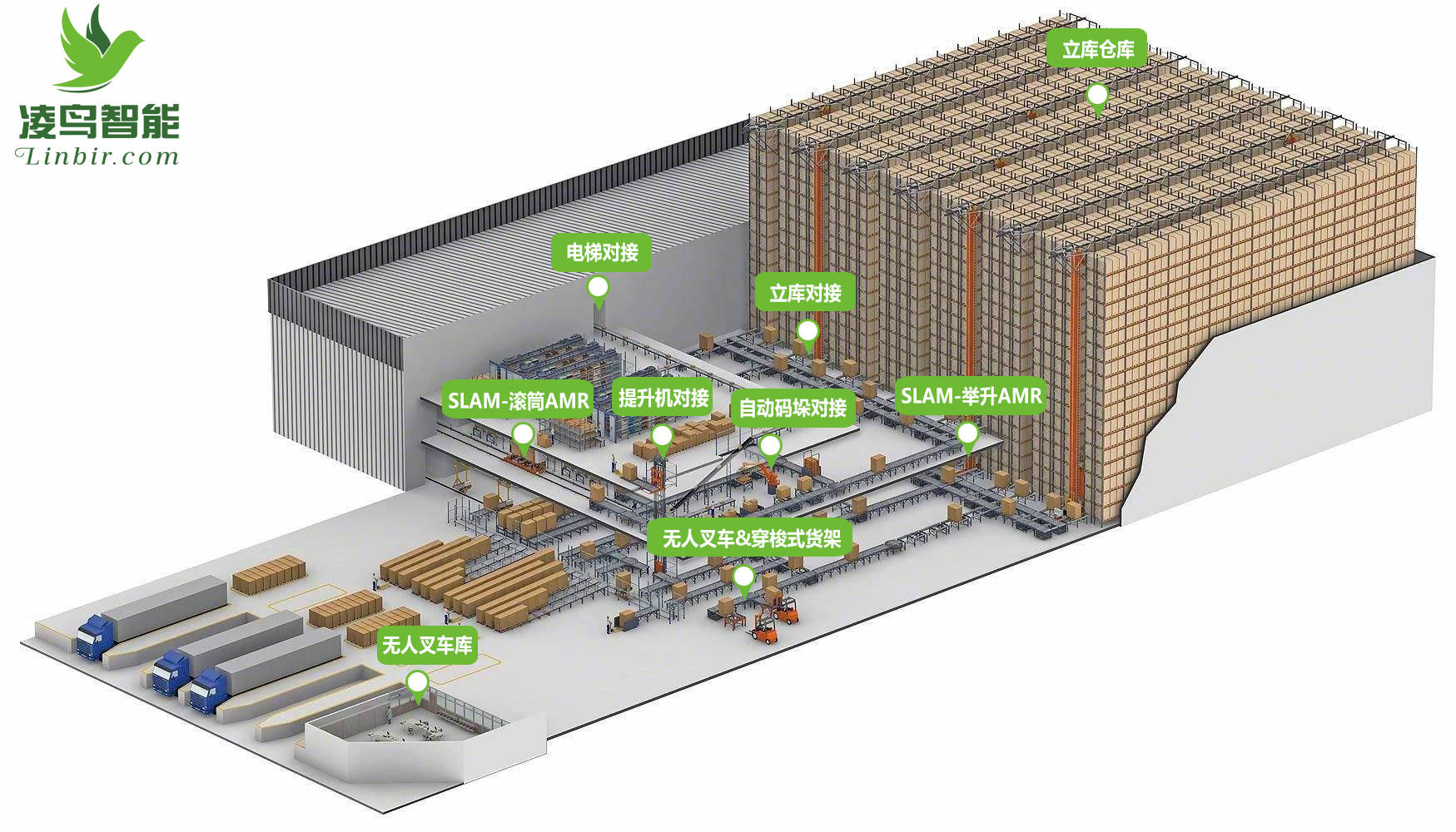
,現(xiàn)在有越來越多的工廠開始使用智能設(shè)備,取代人工的裝箱、碼垛、廠內(nèi)轉(zhuǎn)運(yùn)以及產(chǎn)品檢驗(yàn)等工作,而AGV自動(dòng)導(dǎo)引運(yùn)輸車(Automatic Guided Vehicle)便是其中之一。 AGV倉(cāng)儲(chǔ)物流 在物流與制造業(yè)的自動(dòng)化浪潮中,AGV(自動(dòng)導(dǎo)引車)已成為高效搬運(yùn)的核
2025-11-12 17:02:59521 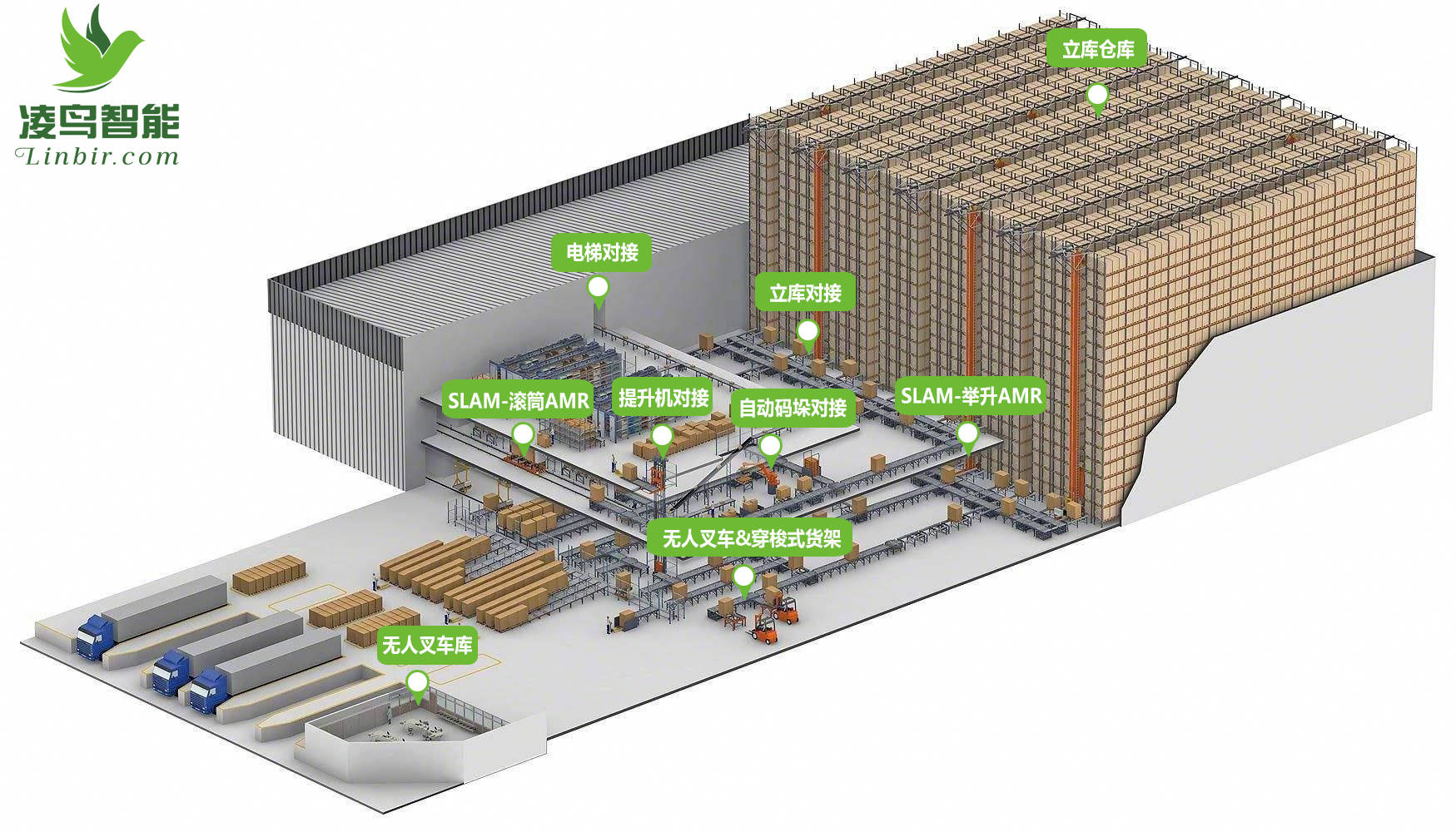
9米、10米、12米…… 這是叉車AGV不斷突破的舉升高度。 通常情況下,市場(chǎng)上大多數(shù)叉車AGV舉升高度為5-8米。但近兩年卻相繼推出舉升高度超10米的高位AGV,探索“高空”作業(yè)。 AGV無人倉(cāng)
2025-11-11 09:43:20354 
獲取移動(dòng)物體在空間中所處的位置、方向和其他環(huán)境信息,并用一定的算法對(duì)所獲信息進(jìn)行處理,建立環(huán)境模型,進(jìn)而尋找一條最優(yōu)或近似最優(yōu)的無碰路徑,實(shí)現(xiàn)安全移動(dòng),到達(dá)目的地。 AGV物流倉(cāng)儲(chǔ) 視覺導(dǎo)航的核心是通過攝像頭采集環(huán)境圖像,結(jié)合計(jì)算
2025-11-04 15:54:06353 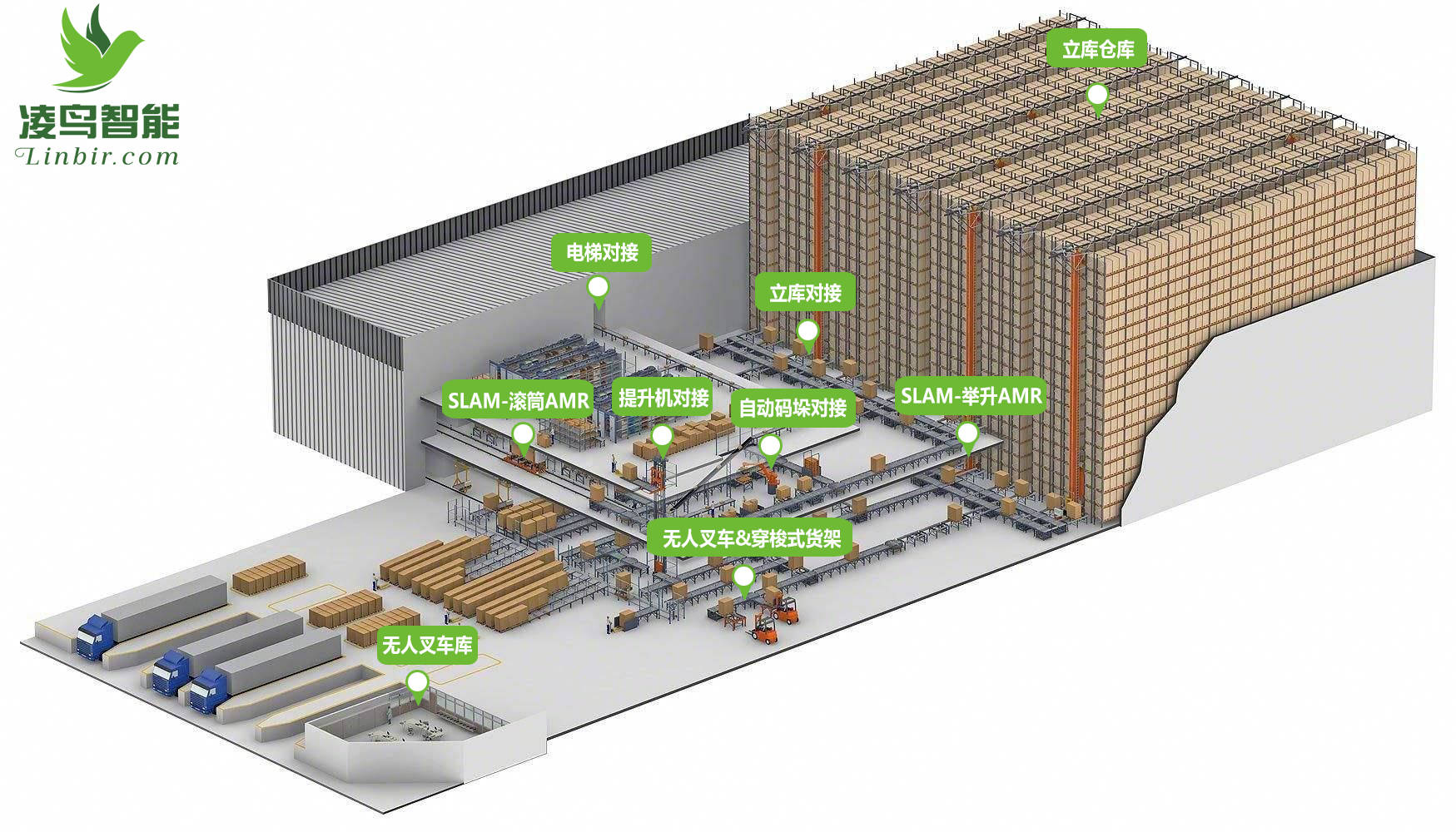
、汽車、家電等自動(dòng)化行業(yè),眾多新行業(yè)對(duì)AGV的需求量上升,推動(dòng)著AGV的發(fā)展。隨著制造業(yè)智能化、自動(dòng)化的發(fā)展,AGV在原材料上線、成品下線、倉(cāng)儲(chǔ)及貨物出庫(kù)等方面,成為物流倉(cāng)儲(chǔ)的必然選擇。 AGV無人倉(cāng) AGV的核心優(yōu)勢(shì)在于其高效性和精準(zhǔn)
2025-10-30 09:33:01168 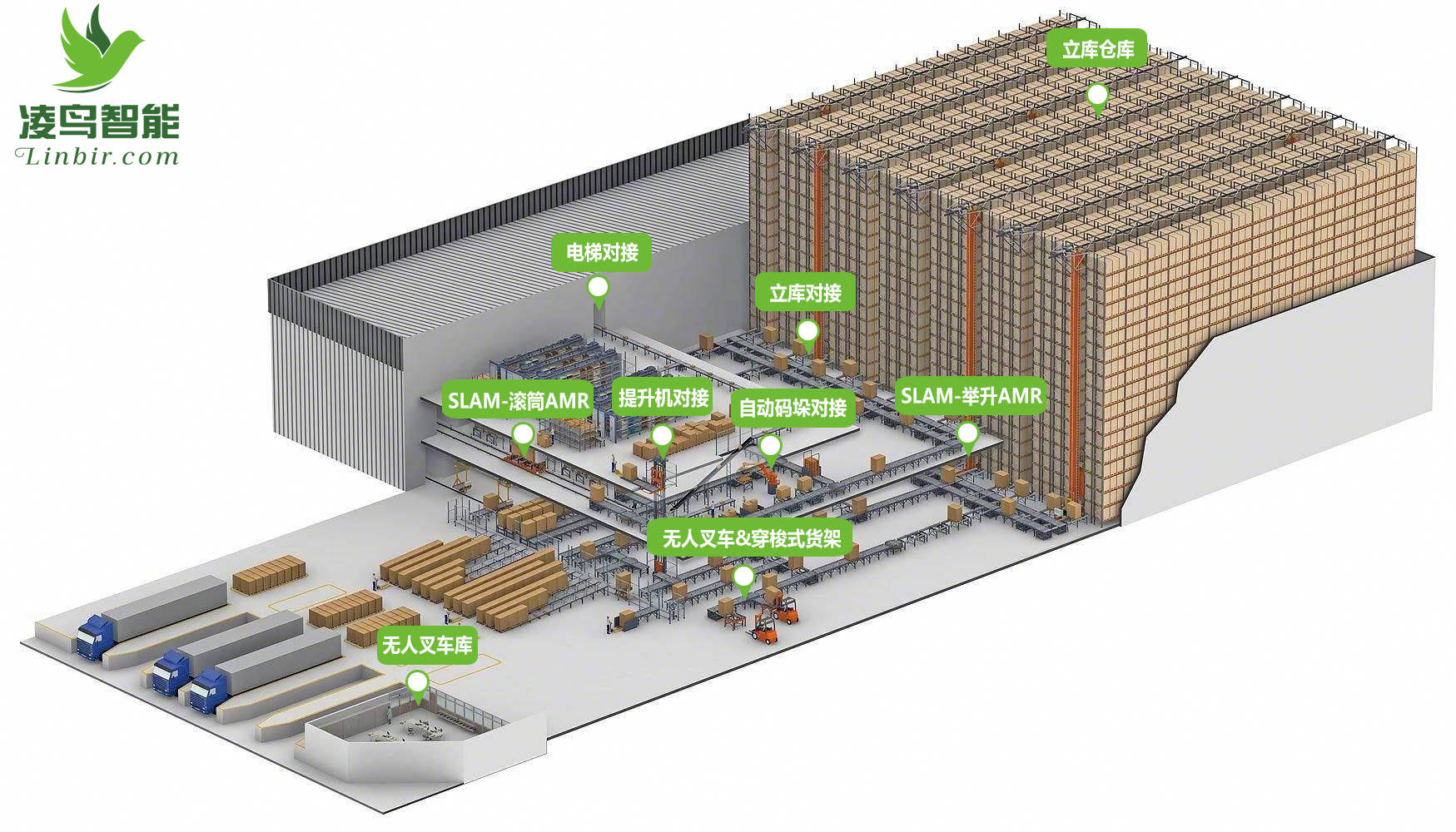
本次分享的內(nèi)容是基于級(jí)聯(lián)分類器的人臉檢測(cè)基本原理
1) 人臉檢測(cè)概述
關(guān)于人臉檢測(cè)算法,目前主流方法分為兩類,一類是基于知識(shí),主要方法包括模板匹配,人臉特征,形狀和邊緣,紋理特征,顏色特征
2025-10-30 06:14:29
AGV合集在當(dāng)下的工廠運(yùn)作中,物流環(huán)節(jié)就像一條無形的紐帶,串聯(lián)起生產(chǎn)、倉(cāng)儲(chǔ)、配送等各個(gè)關(guān)鍵節(jié)點(diǎn)。
2025-10-23 17:02:07139 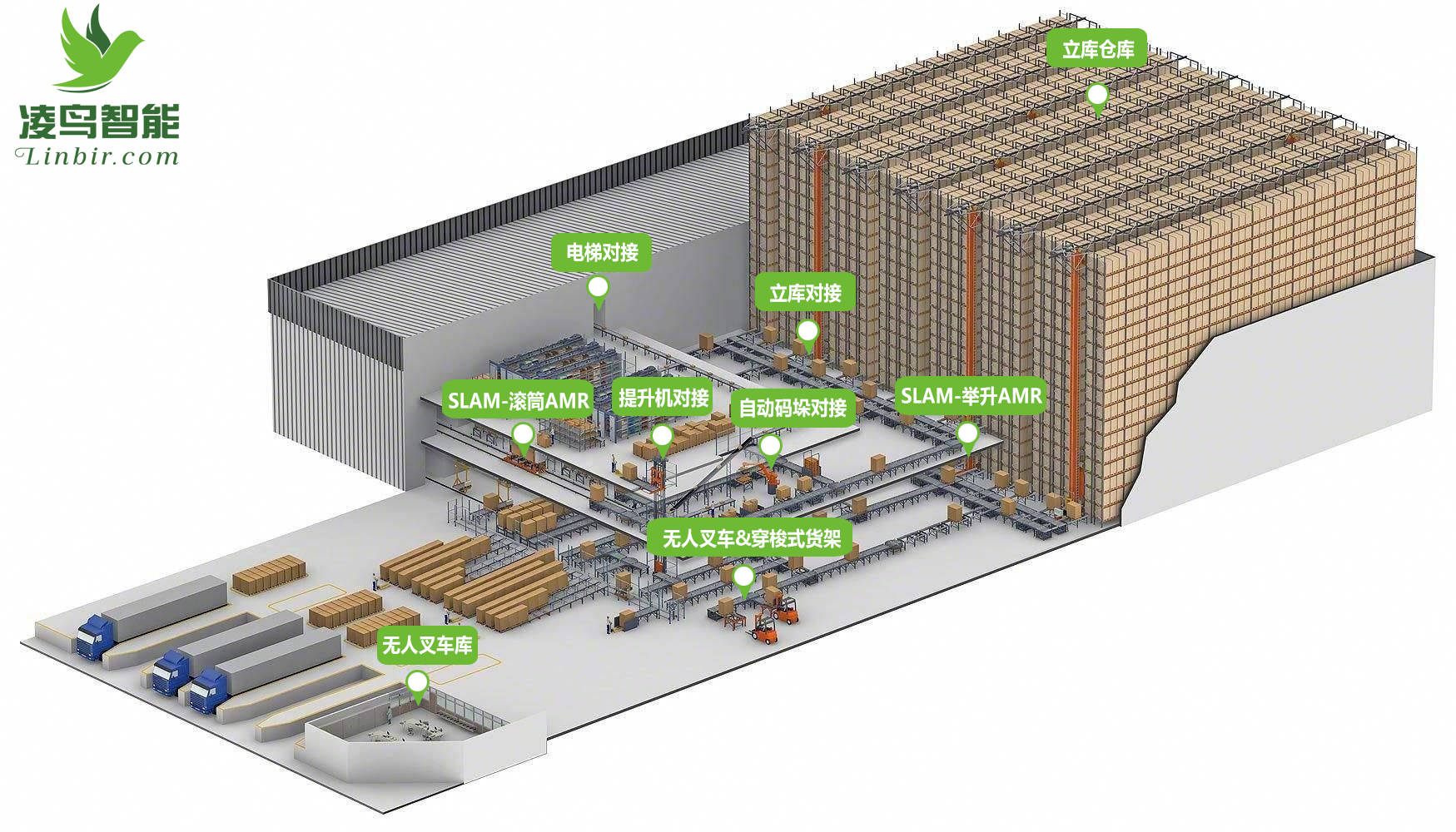
沖擊電壓發(fā)生器的基本原理是 “電容并聯(lián)充電、串聯(lián)放電”,核心流程分三步:
先通過整流電路,將工頻交流電轉(zhuǎn)換為直流電,給多組電容器并聯(lián)充電,儲(chǔ)存足夠電能并達(dá)到設(shè)定電壓;
當(dāng)充電完成后,觸發(fā)高壓開關(guān)使
2025-10-17 14:10:16
羅德與施瓦茨RTB2004示波器憑借其強(qiáng)大的網(wǎng)絡(luò)接口功能,可實(shí)現(xiàn)遠(yuǎn)程控制、數(shù)據(jù)傳輸與團(tuán)隊(duì)協(xié)作,廣泛應(yīng)用于工業(yè)自動(dòng)化、科研測(cè)試等領(lǐng)域。本文將詳細(xì)介紹其網(wǎng)絡(luò)操作方法,幫助用戶高效利用該功能。
2025-10-14 16:55:43443 
隨著制造業(yè)數(shù)字化升級(jí)和電商物流快速發(fā)展,傳統(tǒng)倉(cāng)儲(chǔ)正在向“無人化”“柔性化”“智能協(xié)同”全面邁進(jìn)。AMR/AGV市場(chǎng)規(guī)模進(jìn)一步擴(kuò)大,自動(dòng)搬運(yùn)機(jī)器人已成為智能倉(cāng)儲(chǔ)系統(tǒng)的核心組成部分。3C電子配件倉(cāng)庫(kù)在
2025-10-10 18:11:23365 
?AGV 近年來,隨著智能制造的快速發(fā)展,越來越多的生產(chǎn)、制造型企業(yè)也加快了升級(jí)改造的步伐。柔性化、自動(dòng)化的生產(chǎn)線及倉(cāng)儲(chǔ)物流系統(tǒng)受到眾多企業(yè)的青睞。A GV是柔性生產(chǎn)線和智能倉(cāng)儲(chǔ)物流系統(tǒng)的關(guān)鍵設(shè)備
2025-10-09 16:26:45719 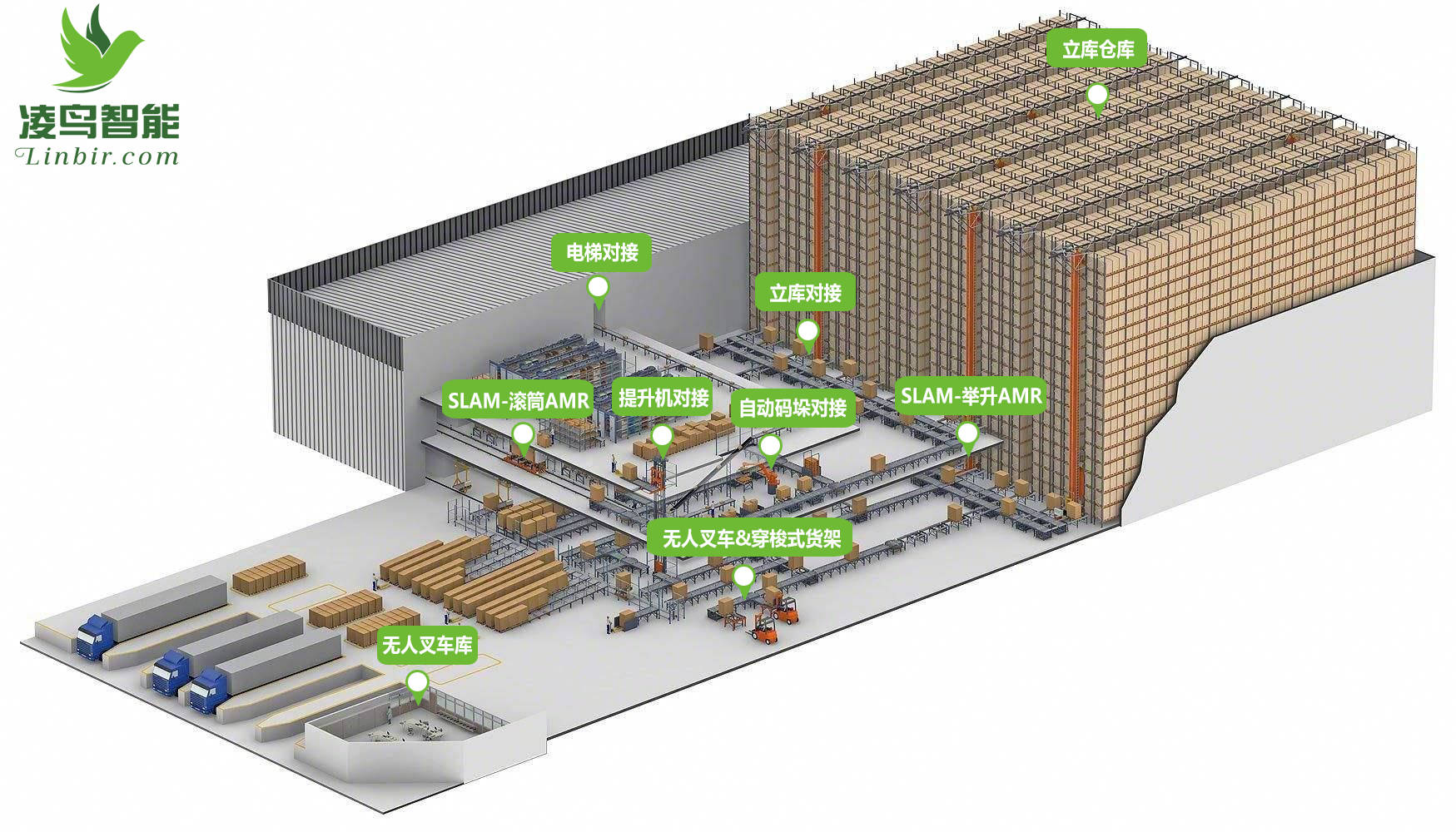
? AGV 毋容置疑,AGV小車投用之后帶來的產(chǎn)能提升效益是明顯的。通過設(shè)備替代人工,也能一定程度上減少叉車造成的車輛傷害、擠壓傷害等事故,畢竟是減少了人員暴露在危險(xiǎn)環(huán)境中的頻率。 AGV運(yùn)輸系統(tǒng)
2025-09-28 14:57:02272 
1. 技術(shù)適配性評(píng)估 導(dǎo)航方式選擇 根據(jù)現(xiàn)場(chǎng)環(huán)境選擇最適合的導(dǎo)航技術(shù): 環(huán)境穩(wěn)定、路徑固定:考慮磁導(dǎo)引或二維碼導(dǎo)航AGV叉車 環(huán)境復(fù)雜、需頻繁變徑:激光導(dǎo)航或視覺導(dǎo)航無人叉車機(jī)器人更合適 負(fù)載能力
2025-09-22 17:30:03569 
科技官網(wǎng)-AGV叉車十大品牌-無人叉車廠家-自動(dòng)化叉車-智能搬運(yùn)碼垛機(jī)器人-智能叉車系統(tǒng)解決方案專家 一、需求分析:從“模糊想象”到“場(chǎng)景畫像” 典型誤區(qū):某車企未評(píng)估搬運(yùn)頻次,導(dǎo)致AGV自動(dòng)化無人叉車機(jī)器人充電頻率過高,項(xiàng)目回本周
2025-09-19 10:56:41419 在智能制造與智慧物流場(chǎng)景中,自動(dòng)化AGV無人駕駛叉車機(jī)器人通過多維度技術(shù)融合構(gòu)建了立體化安全防護(hù)體系,覆蓋環(huán)境感知、決策控制、設(shè)備協(xié)同、應(yīng)急響應(yīng)全流程,確保人機(jī)貨場(chǎng)高效協(xié)同作業(yè)。 ? 一、核心技術(shù)
2025-09-17 17:16:26518 叉車是工業(yè)物流、倉(cāng)儲(chǔ)轉(zhuǎn)運(yùn)及生產(chǎn)車間物料搬運(yùn)的核心設(shè)備,其運(yùn)行穩(wěn)定性、作業(yè)效率、安全管控及維護(hù)及時(shí)性,直接影響物流周轉(zhuǎn)效率、運(yùn)營(yíng)成本、人員安全與生產(chǎn)連續(xù)性。 傳統(tǒng)叉車管理存在明顯痛點(diǎn):運(yùn)行數(shù)據(jù)依賴人工
2025-09-10 17:08:02603 
 電子發(fā)燒友App
電子發(fā)燒友App








































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論