 當 RDK X3 遇上倉儲機器人,智鏈團隊讓效率原地起飛
當 RDK X3 遇上倉儲機器人,智鏈團隊讓效率原地起飛

倉儲界現在是 "卷王" 爭霸賽!2023 年全國消費狂飆 47 萬億,網購更是坐火箭般漲了 11%,但老派倉儲還在用 "人海戰術",設備像戴著近視眼鏡,看啥都不清不楚。
別急!我們帶著倉儲界的 "六邊形戰士" 來救場了!這臺智能倉儲機器人,堪稱倉儲界的 "瑞士軍刀"。無人叉車自帶 "聰明大腦",能讀手勢、懂指令,溝通毫無障礙;差速舵輪 + 四輪全向移動的設計,讓它在狹窄空間里像跳探戈一樣靈活走位;雙目深度相機搭配多源傳感器,直接給機器人裝上 "千里眼",高處障礙物無所遁形,專治傳統設備 "目光短淺" 的毛病。
立體倉庫更是 "省錢小能手",用極簡抬升裝置取代笨重的傳統碼垛機,成本直接 "打對折"。全流程自動化算法一上線,效率拉滿、成本清零,中小企業閉眼沖就完事了!——智鏈倉儲團隊
第一章 特色與創新
1.1 無人叉車特色與創新
1.1.1 差速舵輪底盤——四輪全向移動模組
- 靈活如“螃蟹”:四輪差速舵輪設計,實現全向移動(橫著走、斜著走、原地轉圈),在狹窄空間也能“絲滑”穿梭。
- 低趴車身:降低整體高度,提升穩定性,同時增加倉庫貨架密度,讓倉儲空間利用率“卷”出新高度。
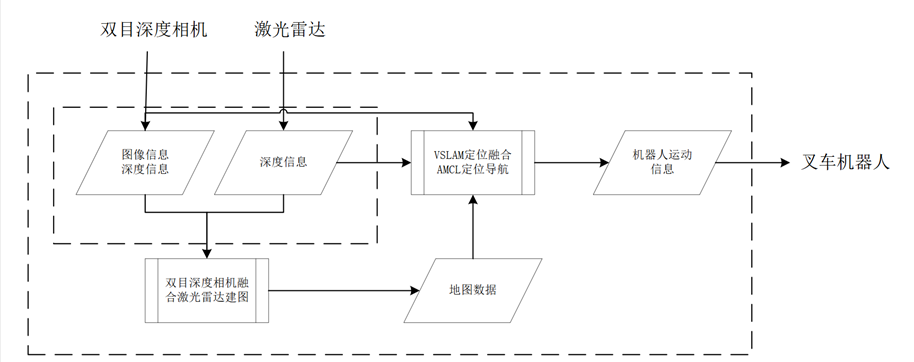
1.1.2 多源傳感器融合建圖
- 激光雷達+雙目攝像頭=“鷹眼”+“透視”:
- 傳統激光雷達:只能“平視”,遇到高處障礙物直接“裝瞎”。
- 我們的方案:結合雙目深度相機,實現3D立體感知,貨架頂層、懸空障礙統統“看得見”。
- 高精度導航:建圖更準、避障更穩,機器人再也不會“迷路”或“撞墻”。
1.2 智鏈倉儲特色與創新
1.2.1 全流程自動化控制
1.2.2 貨叉立體抬升結構
- 結構極簡,成本暴降:相比傳統碼垛機,省去復雜機械結構,維護成本低到“真香”。
- 萬能適配:不管貨物是方是圓、是大是小,都能穩穩抓取,再也不用人工“硬塞”。
1.2.3 倉庫智能管理算法
1.2.4 多機協同作業
- 機器人“團隊作戰”:
- 任務分工:A車搬貨、B車碼垛,配合默契如“流水線工人”。
- 實時通信:共享地圖和任務狀態,避免“搶活”或“摸魚”。
- 動態避障:即使“狹路相逢”,也能優雅錯身,絕不“打架”。
第二章 功能設計
2.1 機械設計
2.1.1 車體結構
- 輕量化+高強度:采用鋁合金框架+玻纖板外殼,重量輕、強度高,耐腐蝕,適應各種倉儲環境。
- 低重心穩定設計:貨叉立體抬升結構優化重心分布,防止傾覆,搬運更安全。
- 全向移動黑科技:差速舵輪實現橫移、斜行、原地旋轉,在狹窄空間靈活穿梭,底盤更低,貨叉更容易深入貨架底層。
2.1.2 貨叉系統
- 玻纖板貨叉:輕量化設計,強度高,適配不同尺寸貨物。
- 電動絲桿驅動:比傳統液壓/氣動更精準、響應更快,升降平穩,節能易維護。
2.1.3 結構優化
- 有限元分析(FEA):對關鍵部件進行應力仿真,優化材料強度,確保長期耐用。
- 動態受力分析:針對不同負載、速度、轉彎工況優化結構,提升整車剛性和穩定性。
2.2 電控設計
2.2.1 硬件配置
- 主控:RDK X3(Linux系統)+ 大疆A型開發板(FreeRTOS),算力強大,支持多任務并行。
- 傳感器融合:
- RPLidar A1激光雷達:360°掃描,8000次/秒測距,高精度建圖。
- 樂視深度攝像頭:雙目立體視覺,識別高處障礙,彌補激光雷達盲區。
- RFID模塊:自動掃描貨架標簽,實現無人化出入庫。
- 環境傳感器:溫濕度、紫外線監測,保障倉儲環境安全。
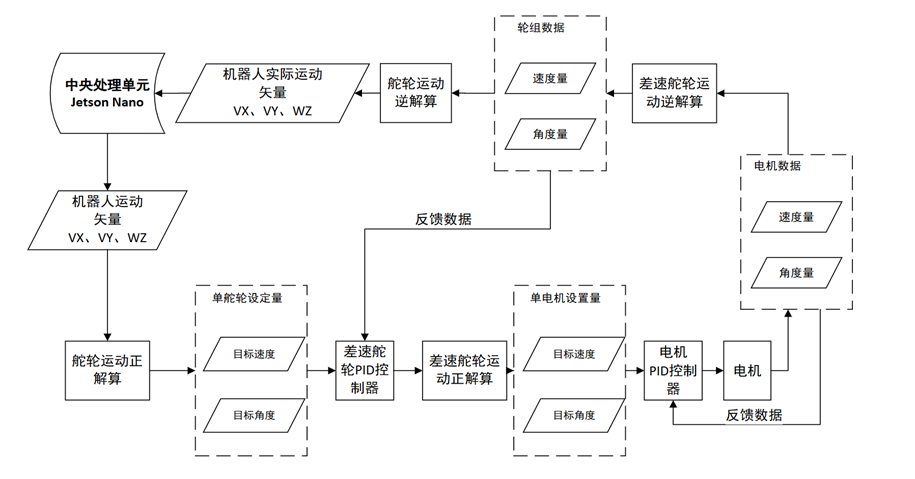
2.2.2 智能算法
- 導航定位:
- vSLAM視覺定位+激光雷達AMCL算法,精準確定機器人位置。
- A*路徑規劃,動態避障,效率提升50%。
- 運動控制:
- 串級PID控制,差速舵輪角度/速度閉環調節,移動精準如“尺子量過”。
2.2.3 自動化流程
- 入庫→存儲→出庫全自動:RFID識別+云端數據庫聯動,庫存管理零誤差。
- 多機協同:任務動態分配,路徑實時優化,機器人之間“默契配合不打架”。
第三章 系統實現
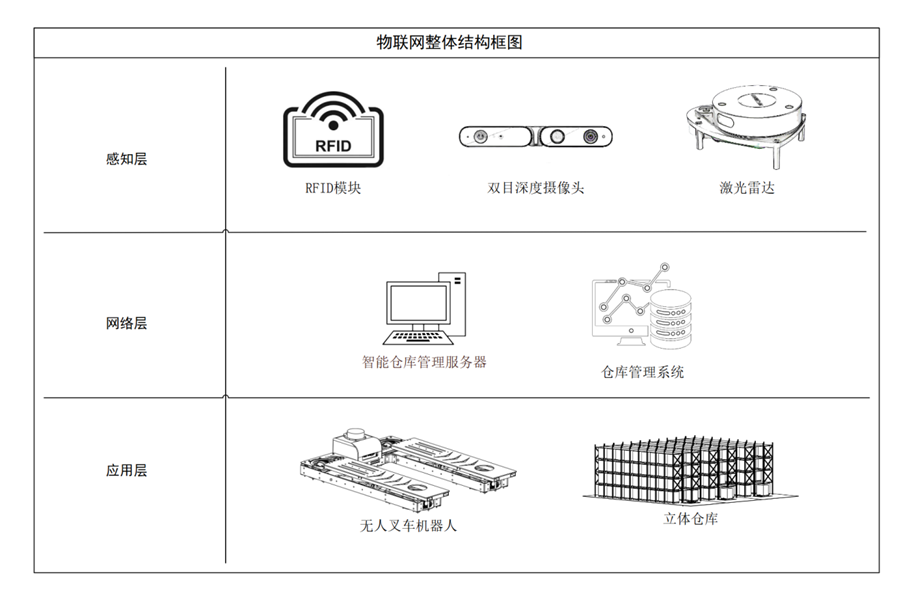
3.1 感知層
感知層是系統第一層,通過傳感器等設備收集環境信息,轉化為網絡可理解格式,為機器人決策和行動提供數據支持。
- 組成結構
- 貨物感知:用二維碼、AI、聲音分析、RFID 技術標識定位貨物,識別物品信息,自動記錄進出庫數據。
- 倉庫環境感知:安裝溫濕度、光照傳感器,監測環境條件,保證倉儲符合要求。
- 移動感知:利用雙目相機、激光雷達,實現機器人導航避障,感知周圍環境。
- 信息感知:預處理和提取數據特征,用 AI 技術分析貨物條件,調整分區。
- 功能
- 數據采集:采集環境和貨物數據,計入云端數據庫。
- 數據預處理與特征提取:濾波、去噪、校驗數據,提取特征。
- 環境理解與識別:理解環境,識別對象和事件,保證倉儲條件。
- 數據傳輸與通信:將信息傳輸到應用層或網絡層。
- 應用
- 智能庫存管理:用視覺識別和 AI 技術,記錄貨物進出庫數據。
- 快速分揀:結合 RFID 和 AI 技術及云端數據庫,實現快速分揀。
- 自主導航與避障:利用激光雷達和雙目相機,實現導航避障和精準叉取。
- 倉內環境監測:用溫濕度、光照傳感器,調整倉儲區塊。
- AI 技術運用:分析貨物圖像和人物動作、聲音,讓機器人識別指令。
- 總結:感知層為機器人提供關鍵數據,通過多種功能確保系統穩定高效運行。
3.2 網絡層
網絡層負責將感知層數據傳輸到應用層,完成接入和傳輸功能。
- 組成結構
- 數據傳輸協議:采用 MQTT、CoAP、HTTP/2 等協議,滿足數據傳輸需求。
- 無線網絡技術:應用 LPWANs 技術,廣域覆蓋、低能耗。
- 數據加密與安全:用 TLS/SSL 等確保數據安全,保護隱私。
- 不同網絡橋接:橋接本地和云端網絡,有接口標準化等優勢。
- 功能
- 設備連接管理:管理設備接入,驗證身份。
- 地址管理:分配設備標識符和地址。
- 路由和轉發:確定數據路徑,優化網絡效率。
- 數據傳輸控制:保證數據可靠性和時效性。
- 安全和隱私保護:加密認證,管理訪問控制。
- 網絡管理和監控:監控網絡性能和設備狀態。
- 服務質量(QoS)管理:提供服務質量保證。
- 應用
- 實時數據監控:傳輸實時數據,輔助決策。
- 遠程控制與管理:遠程控制機器人,物聯網平臺提供 API。
- 數據分析與挖掘:傳輸數據,提取有價值信息。
- 不同網絡橋接:實現邊緣緩存、就近訪問等功能。
- 總結:網絡層通過多種措施確保數據可靠高效傳輸,支持機器人智能決策和行動。
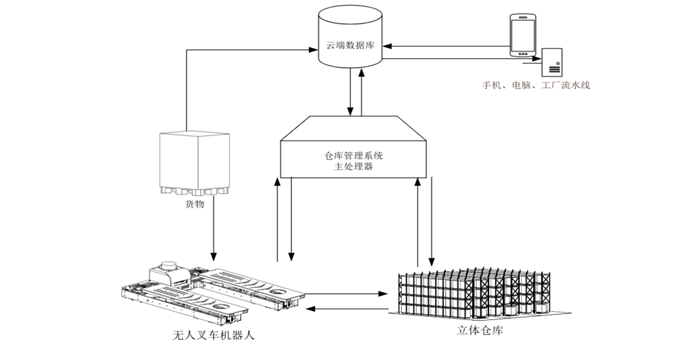
3.3 應用層
- 產品層
- 無人叉車:全向底盤設計,多源傳感器建圖,結合倉庫系統或識別人動作聲音,車有兩個 RFID 模塊。
- 立體倉庫:貨架有 RFID 標簽,與機器人通信,倉庫有多種傳感器,系統調配貨物。
- 叉車托盤:有 RFID 標簽,無人叉車可獲取位置信息。
- 倉庫管理系統:用蟻群算法迭代,調配機器人,獲取傳感器信息,提供可視化界面,上傳日志到云端。
- 底層
- 通信方式:串口通信用于機器人內部,RFID 通信用于機器人與立體倉庫,WIFI 通信建立局域網。
- 控制方式:RDK X3 派為核心控制器,大疆 A 型開發板為下位控制器。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
人工智能
+關注
關注
1819文章
50200瀏覽量
266371 -
電動叉車
+關注
關注
5文章
48瀏覽量
9062 -
倉儲機器人
+關注
關注
0文章
34瀏覽量
6932
發布評論請先 登錄
相關推薦
熱點推薦
半年參與3萬輛寶馬X3生產,人形機器人“進廠打工”真成了
了其人形機器人“進廠打工”的最新成果。 ? Figure 02:半年參與3萬輛寶馬X3生產,進入退役階段 ? 根據Figure AI的說法,在過去的六個月內,其第二代人形機器人Figu

廣州團隊研制出機器人“觸覺皮膚”
機器人的發展日新月異,廣州團隊研制出機器人“觸覺皮膚”!廣州團隊研制的亞毫米級雙模態觸覺傳感器陣列,是機器人觸覺技術發展的重要里程碑,它不僅
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
顧客展示信息或廣告,提升服務體驗與商業價值。物流與配送機器人· 應用領域:倉儲機器人、快遞配送機器人、室內運輸機器人· 多攝像頭輸入:360
發表于 10-29 16:41
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
,也推動著機器人應用場景變革。昆泰芯 KTH71 系列傳感器芯片工作溫度范圍擴展至 - 40℃~125℃,讓機器人首次能在 “極寒救援模擬”“高溫焊接挑戰” 等極端項目中穩定運作,某團隊
發表于 08-26 10:02
RDK × 腿臂機器人:這只 “機械汪” 竟會說人話、走花路!
,基于RDKX3平臺進行AI大模型算法開發,提出了一種融合AI大模型的創新性解決方案,提升腿臂機器人的綜合性能。-項目首先強化了機器人的多模態感知能力,利用雷達、攝像

算控一體新物種發布!百TOPS算力,地瓜為具身機器人量產“夯地基”
此前發布的RDK X3平臺(5TOPS)和RDK X5(10TOPS)形成互補,進一步豐富地瓜機器人在不同應用場景下的開發支持能力,滿足從入

80 TOPS 算力、大小腦超級異構!地瓜機器人發布 RDK S100 算控一體化機器人開發套件
,驅動具身機器人大小腦協同進化。RDK S100 提供豐富的外圍接口和軟硬協同、端云一體的全鏈路開發基礎設施支持,助力具身機器人開發者一路通關,快速實現產品搭建和多場景部署,加速具身智
發表于 06-11 14:41
?1786次閱讀

當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
在汽車焊裝車間的技術角,工程師小陳的筆記本記滿了“跨協議難題”:當搭載Profinet的庫卡機器人遇上CCLINKIE總線的三菱PLC,數據交互像隔著玻璃喊話——PLC發送的坐標指令要“繞地球半圈
發表于 06-04 14:31
RDK X3 帶飛的智能護理系統:讓機器人秒變貼心小棉襖
濟往開來團隊帶著超燃黑科技來了!基于 RDK X3 開發的老年智能監控系統,跌倒秒報警、手勢一鍵呼叫、還能陪嘮嗑!最絕的是 開源代碼直接甩鏈接 ,技術黨狂喜!

RDK X3新玩法:超沉浸下棋機器人開發日記
下棋平臺,能夠帶給對弈者如同真人對弈的完美沉浸式體驗——棋開得勝團隊。該智能下棋機器人具備3個顯著優點:真實棋盤棋子對弈:通過使用真實棋子、棋盤和機械臂,給對弈者
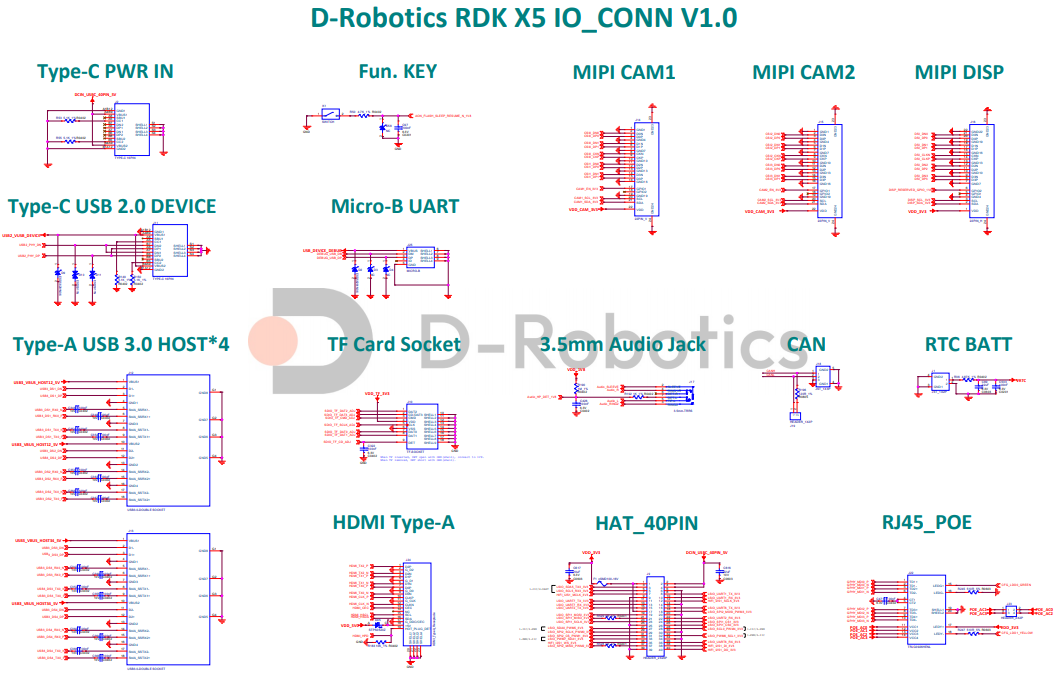
地瓜機器人RDK X5 規格書與地瓜機器人RDK X5原理圖
、割草機等細分場景下與全球超過 200+中小創客、50,000+個人開發者開展深度合作,創造了超過 50+品類的智能機器人。 旭日智能計算芯片相關資料下載鏈接: 地瓜機器人RDK X5
大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機
摘要大象機器人全新推出輕量級高性能教育機械臂myCobot280RDKX5,該產品集成地瓜機器人RDKX5開發者套件,深度整合雙方在硬件研發與智能計算領域的技術優勢,實現芯片架構、軟件算法、硬件結構

九號公司Segway Navimow X3割草機器人獲TüV萊茵"高效割草"Quality-mark認證
巴黎當地時間4月1日,九號公司(Segway-Ninebot)旗下子公司未嵐大陸在巴黎舉辦產品發布會,發布其最新款割草機器人Segway Navimow X3。該產品獲國際獨立第三方檢測、檢驗和認證

基于RDK X3的“校史通”機器人:SLAM導航+智能交互,讓校史館活起來!
智慧校園:校史館也瘋狂在科技狂飆的今天,連校史館都卷起來了!我們給校史館配了個“社牛”機器人:主動迎賓:機器人通過視覺識別,主動上前打招呼,告別“自助式”參觀。語音互動:邊帶路邊講解,校史知識隨問隨




 工商網監
工商網監
評論