 AGV工作節拍計算
AGV工作節拍計算

AGV以電池為動力,裝備有電磁或光學等非接觸自動導引裝置,能夠沿規定的導引路徑行駛,是具有安全保護以及各種移載功能的無人駕駛運輸車。車體在軟件系統的控制下按導航規劃路徑和任務要求,精確地運行到在指定任務站點,完成一系列動作任務。
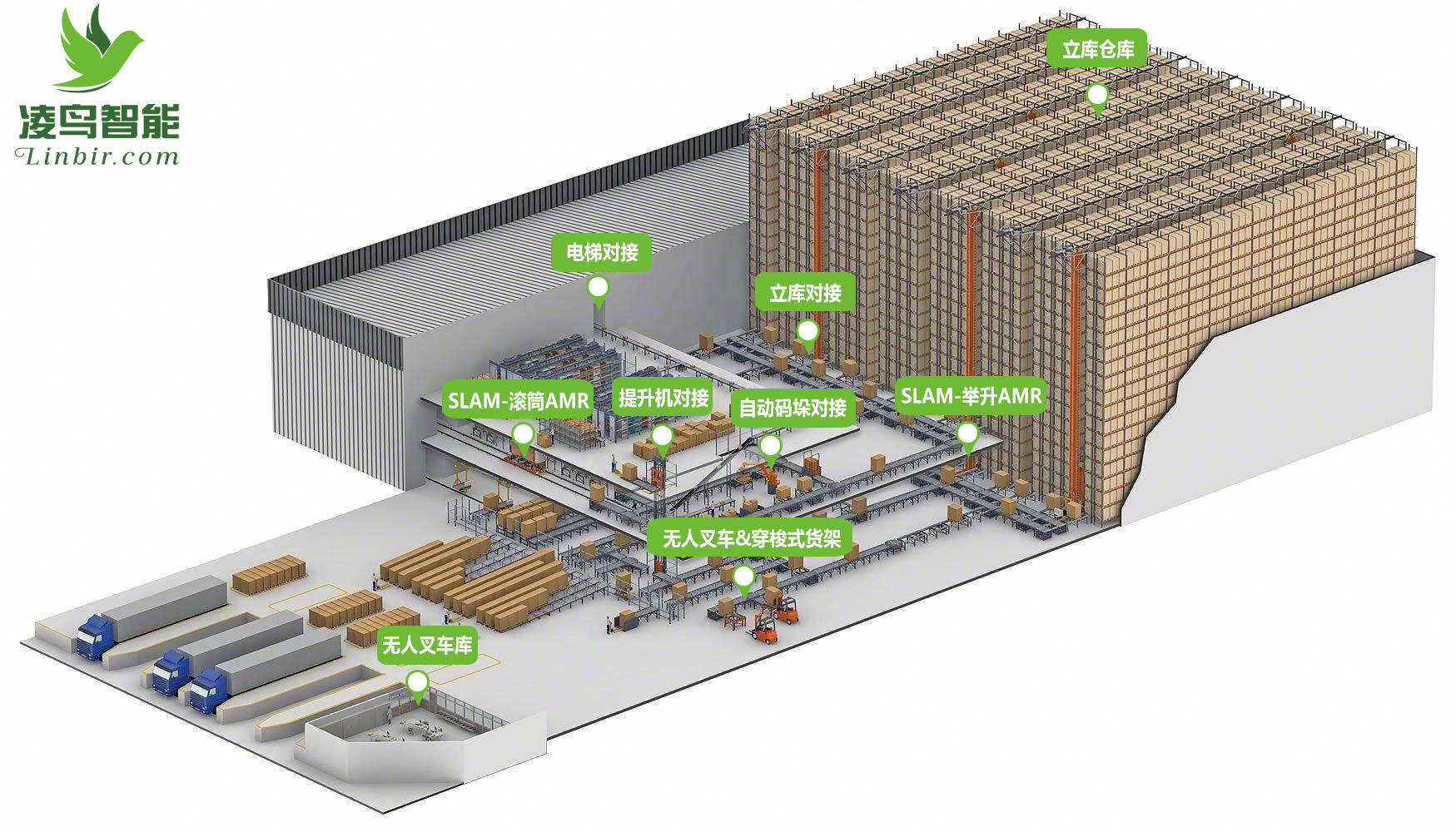 AGV倉儲
AGV倉儲
傳統制造型企業通過引進AGV物流系統實現車間各工位間物到人、點到點的自動物流配送方式,以提高車間物流效率和智能化水平。項目引進過程應在既有生產環境和工藝流程基礎上優化工藝路徑和物料流,具體實施路徑覆蓋生產過程評估、生產流程再造、AGV選型及技術參數符合性評估、自動化設備和專用載具設計開發、設備間互聯互通、供方管理和采購過程管理等。
 AGV小車
AGV小車
生產過程評估包括梳理生產流程、現有物流周轉方式、工作環境和既有設備評估。注塑車間生產流程為原材料供料→干燥→注塑→出模/裝箱→集中/后處理→檢測→包裝→入庫;物料流在注塑工位、集中處理工位、檢測室、后處理工位和庫房各車間生產區域流轉。其中,注塑工位到集中/后處理工位、各工位到檢測室、后處理工位到庫房的產品流和物料流均由人工完成。周轉用推車可容納每班次工序產品,周轉節拍為12h/次。
項目啟動階段充分收集溫度、濕度、地面平整度、坡度、臺階落差、地面縫隙區和水污、油污區域等環境信息;核實設備型號、尺寸和外部設備通訊協議,編制車間設備布局圖,確認AGV工作空間。注塑生產過程流程如圖所示。
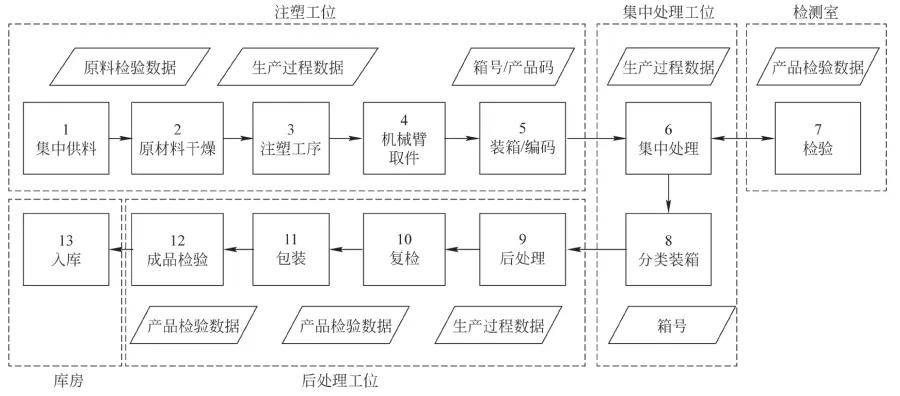 車間生產流程圖
車間生產流程圖
生產流程再造包括評估自動物流配送的點位和路徑、優化物流路徑、定義AGV工作流程、測算生產節拍和物流節拍。移動機器人自主移動關鍵技術需要解決3個關鍵問題:確定當前位置、確定目的地、實現流程。確定當前位置是確定機器人在環境中的位置,通常是在所給定環境地圖的坐標系中確定機器人的位置,即定位問題;確定目的地是目標規劃問題,與任務相關;實現流程則需尋找從機器人當前位置到目標位置的移動規劃和控制,即導航規劃。
 地牛AGV
地牛AGV
傳統制造企業引入新技術新裝備過程務必立足于自身產品制造工藝特點,發現薄弱環節和待優化項目,做好項目策劃和設計驗證工作,逐項解決,避免項目失敗風險。AGV物流系統和自動化設備項目同時設計、同時調試和同時驗收投入使用,可避免智能工廠改造升級過程中重復設計和設備參數不匹配等方面的風險。
AGV工作節拍計算是物流自動化系統設計中的關鍵環節。通過精確計算和持續優化,可以顯著提高生產效率,降低運營成本。隨著技術的進步,未來的AGV系統將更加智能化,節拍計算也將更加精準和高效。
 AGV無人叉車
AGV無人叉車
審核編輯 黃宇
-
AGV
+關注
關注
28文章
1566瀏覽量
43744
發布評論請先 登錄


AGV為何難以防水?


疆鴻智能PROFINET轉DEVICENET的車間對話:網關重塑AGV控制流
告別“充電暫停”:無線充電如何守護汽車智能制造的生命節拍?
AGV中IGPS定位精度提升方法
AGV的種類以及如何進行合理選擇
AGV越長越“高”:如何讓智能搬運更高效?

AGV視覺導航:智能物流的“智慧之眼”


如何選擇合適的背負式AGV小車
AGV充電連接解決方案




 工商網監
工商網監
評論