 AGV視覺導航:智能物流的“智慧之眼”
AGV視覺導航:智能物流的“智慧之眼”

AGV
導航一直是智能小車AGV的核心技術,磁條導航、激光導航、二維碼導航、自然導航等技術之后,最近,視覺導航從后臺走向了前臺,引起AGV行業的重視。
視覺導航即通過視覺攝像頭捕捉圖像信息,以獲取移動物體在空間中所處的位置、方向和其他環境信息,并用一定的算法對所獲信息進行處理,建立環境模型,進而尋找一條最優或近似最優的無碰路徑,實現安全移動,到達目的地。
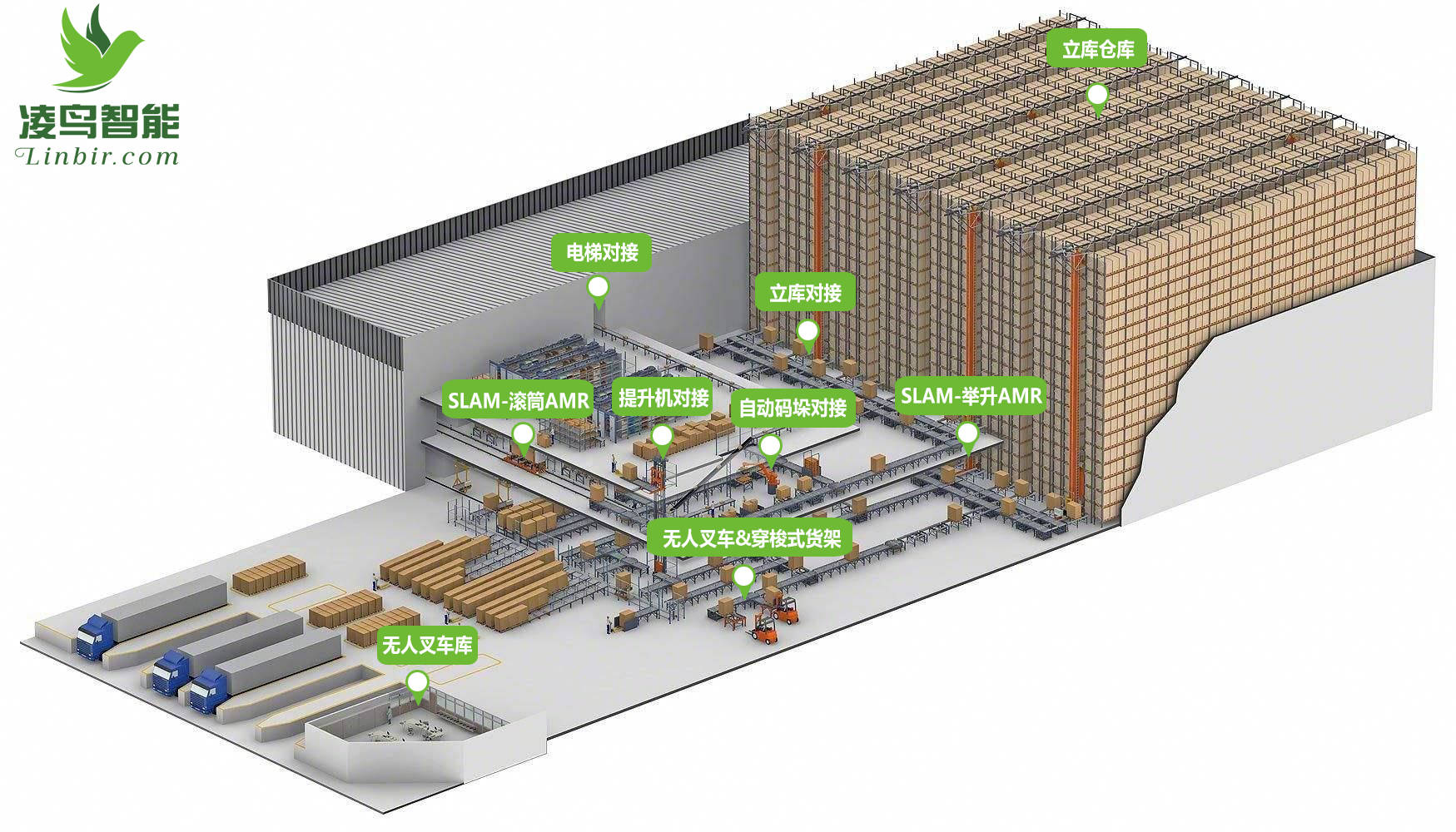
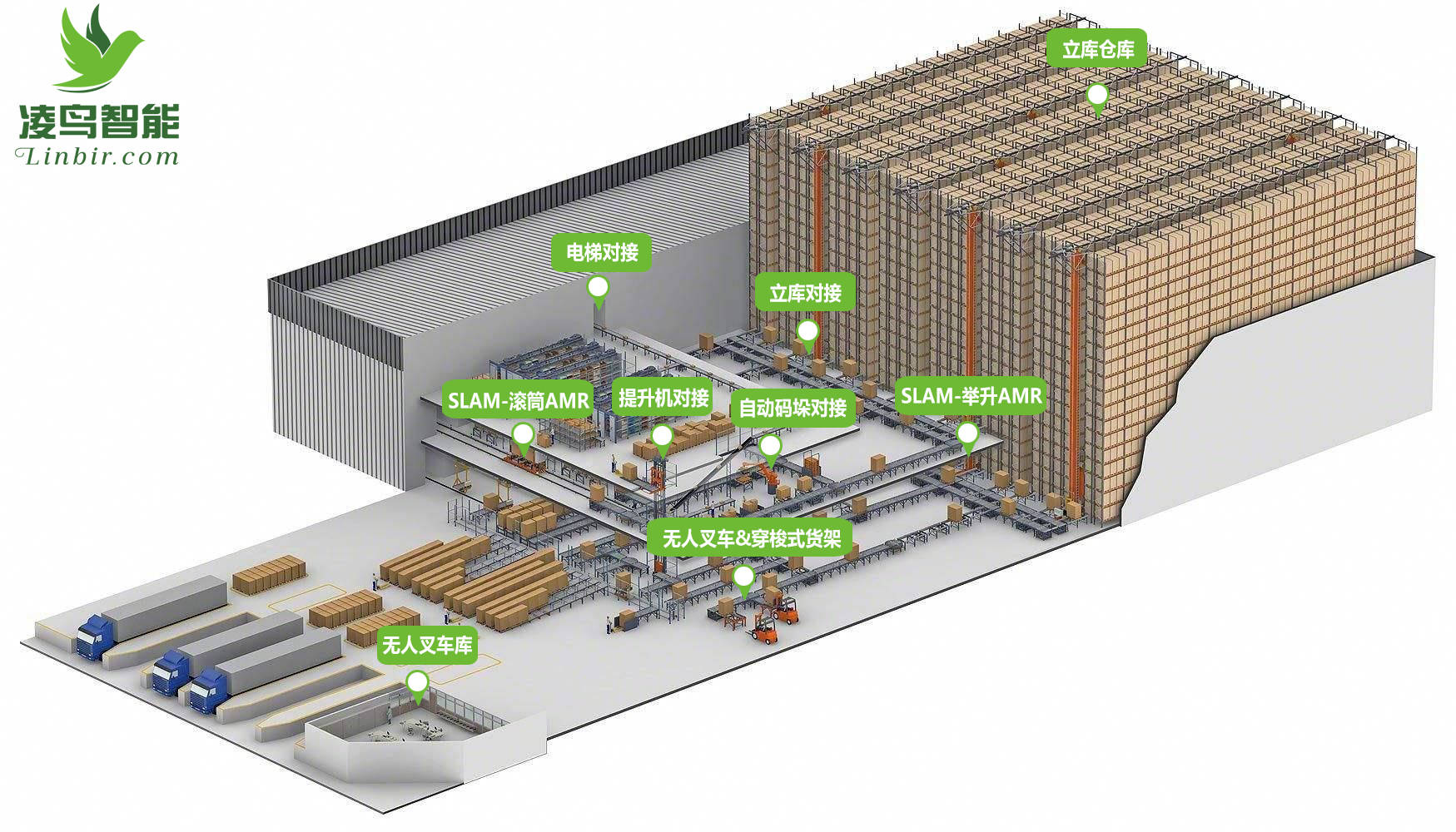
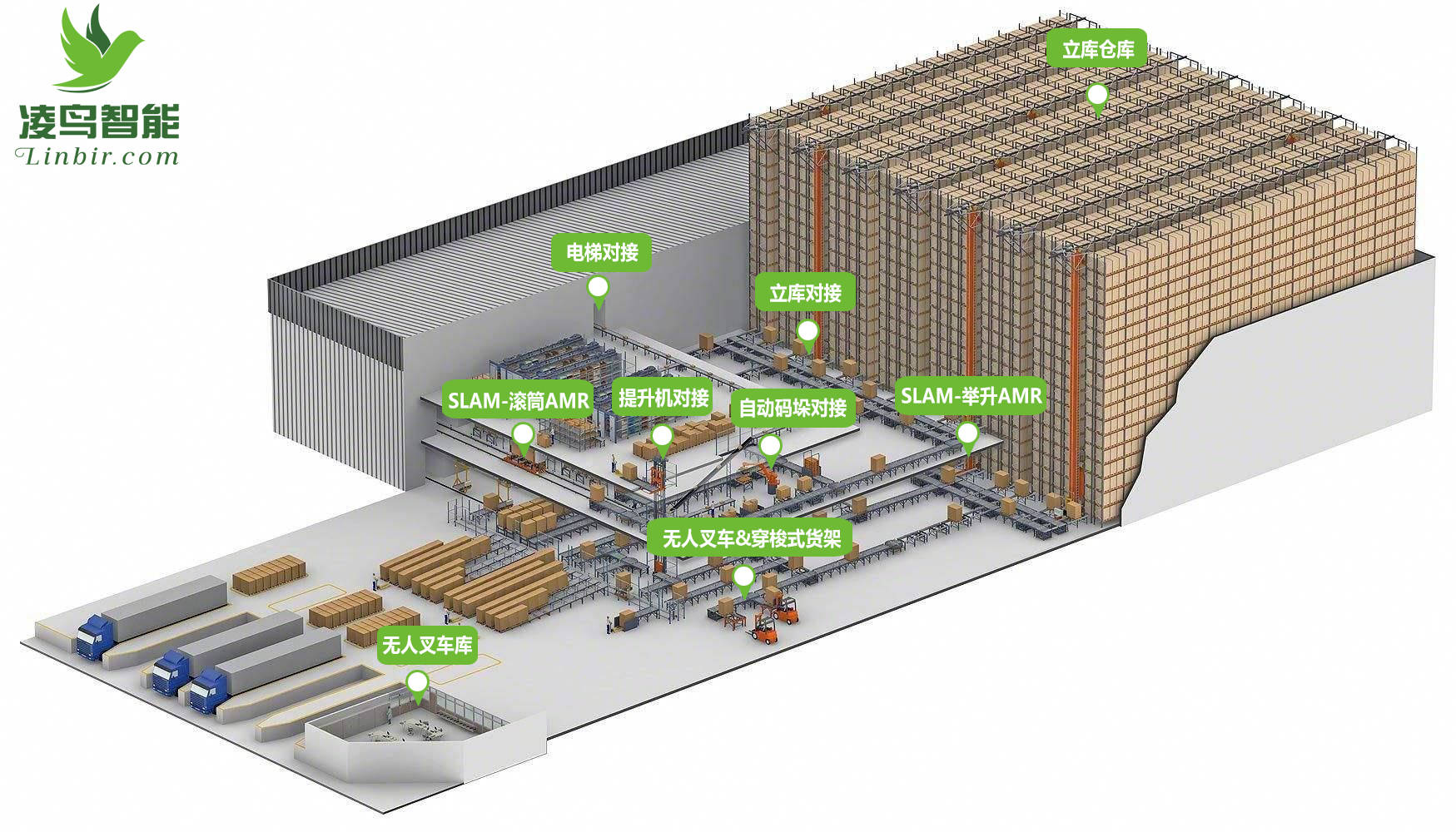 AGV物流倉儲
AGV物流倉儲
視覺導航的核心是通過攝像頭采集環境圖像,結合計算機視覺算法實現定位與路徑規劃。其技術邏輯可分為三個層次:
環境感知:通過攝像頭實時捕捉周圍環境,識別地面特征(如二維碼、紋理、顏色等)或動態障礙物(如行人、叉車)。
數據處理:利用深度學習模型對圖像進行特征提取與匹配,結合SLAM(同步定位與地圖構建)技術構建環境地圖。
決策控制:根據實時位置與目標點,動態規劃最優路徑,并通過電機驅動系統實現精準移動。
 AGV小車
AGV小車
視覺導航通過視覺傳感器采集周圍環境中的地理信息,經過圖像處理和識別,生成導航指令。與非視覺類傳感器相比,視覺傳感器具有無噪聲、無有害影響、信息量大等特點。在實際應用中,只需在路面上畫出路徑引導線或者路標圖形, AGV就可以通過視覺導航系統來控制自身行走。
相對于埋設導線/磁條、安裝磁釘等方法而言, 視覺導航進一步增強了系統的靈活性, 并且降低了安裝使用成本,同時視覺識別也可以避免出現如慣性導航等虛擬路徑導航方法存在的誤差積累問題(在部分應用中,視覺可以作為慣性導航的誤差校正方法)。相對于激光導航方法,視覺導航的優勢在于其低廉的系統硬件成本以及識別功能的擴展能力——只要軟件和模式識別功能足夠智能,自動導引車就可以實現多種導航和定位功能。
 AGV超薄車
AGV超薄車
盡管視覺導航技術已取得顯著進展,但仍面臨以下挑戰:
復雜環境適應性:在強光、反光或低光照環境下,攝像頭可能無法準確識別特征,需結合紅外或激光雷達增強精準性。
算法優化:深度學習模型需持續訓練以提升識別準確率,同時需平衡計算資源與實時性。
標準化缺失:目前視覺導航系統缺乏統一接口標準,導致不同廠商設備難以互聯。
視覺識別導航方法,由于其對地面適應性廣、地理標簽耐重載、導航精度高、硬件成本低等優點,已經在電子制造、家電生產、電氣制造等工業領域得到成功應用。由于視覺導航技術有一定的技術難度,因此目前國內的應用數量少。隨著視覺導航系統硬件成本逐漸下降,以及導航技術的不斷發展,這類AGV系統將進一步擴展在制造業廠內物流系統中的應用。
 地牛AGV
地牛AGV
AGV視覺導航不僅是技術的升級,更是物流自動化從“機械執行”到“智能決策”的跨越。隨著AI、5G等技術的成熟,視覺導航AGV將成為智能制造與智慧物流的核心載體,推動行業向更高效、更柔性、更綠色的方向發展。未來,我們或許將看到AGV通過“視覺”與“智能”的結合,自主完成從倉儲到配送的全流程,真正實現“無人化”物流。
審核編輯 黃宇
-
AGV
+關注
關注
28文章
1562瀏覽量
43722 -
智能物流
+關注
關注
4文章
342瀏覽量
23368
發布評論請先 登錄
AGV安全防護:守護智能物流的隱形防線
AGV通道寬度的影響因素


AGV通道:智能物流運輸的“隱形高速公路”
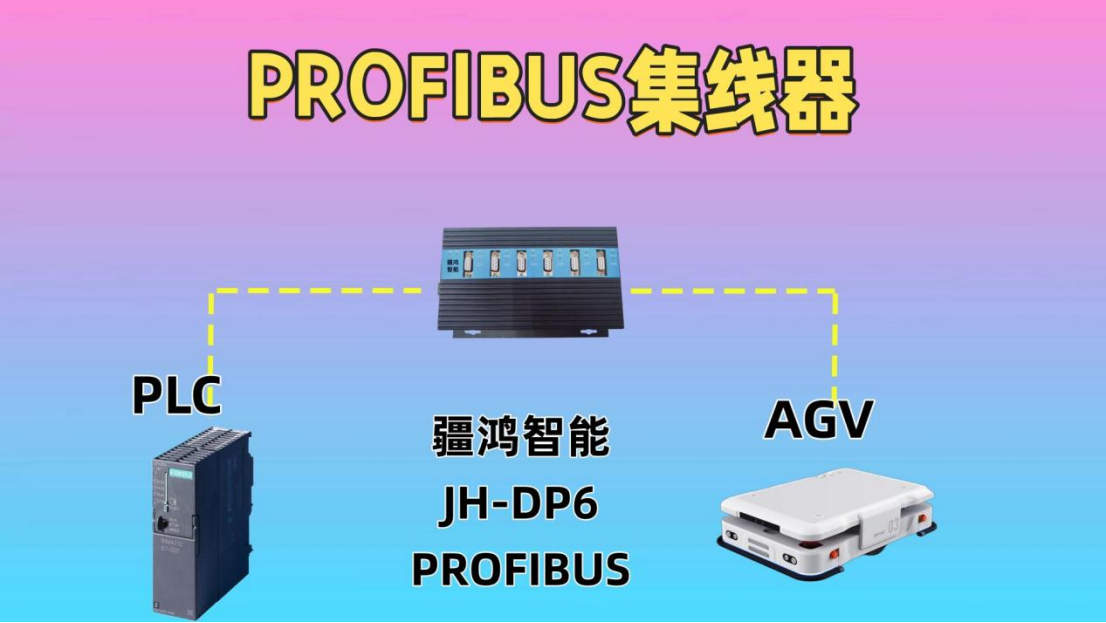
疆鴻智能PROFIBUS集線器:醫藥冷鏈AGV網絡的穩定之錨

AGV軟件:智能制造物流的“智慧大腦”

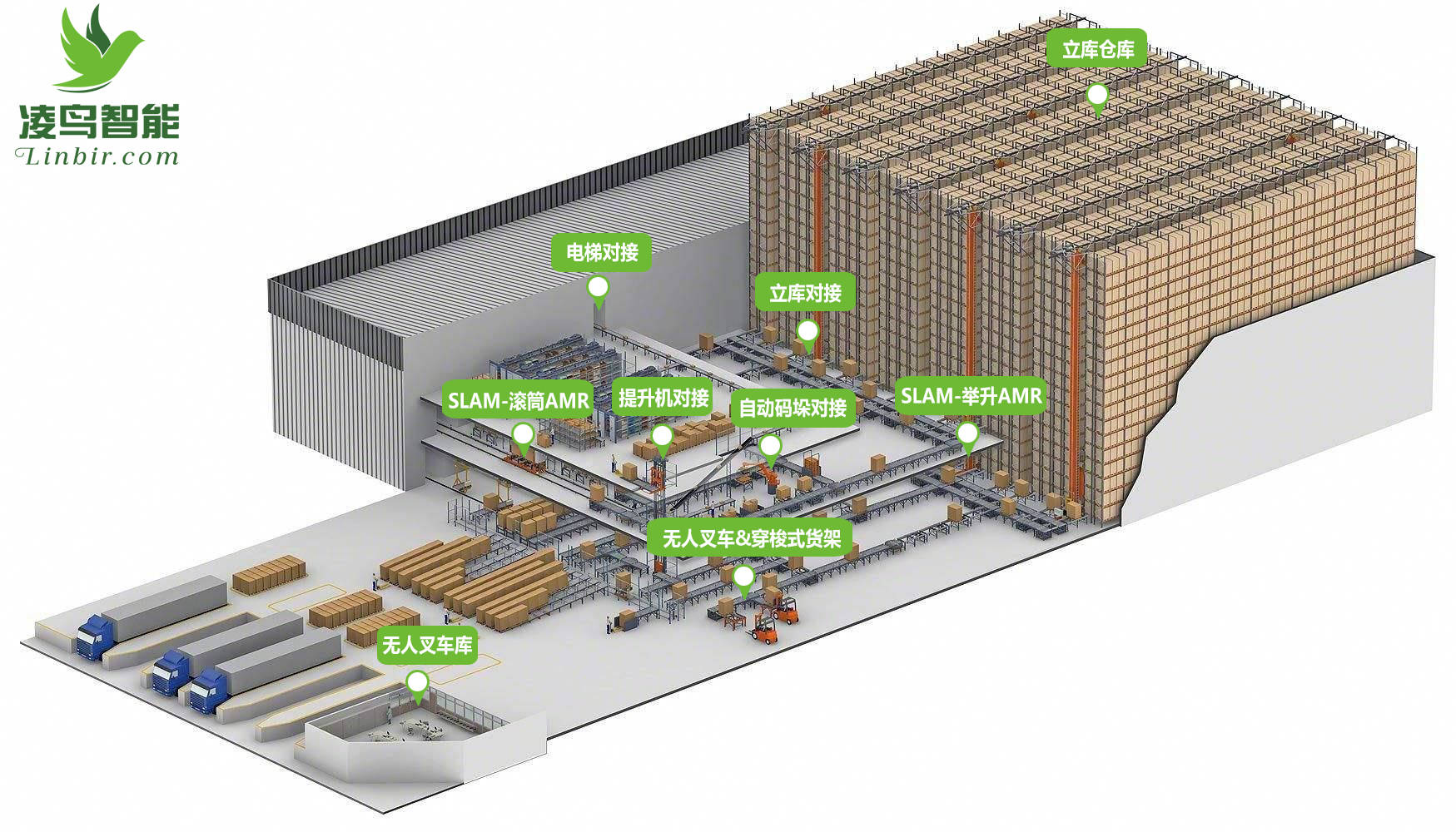
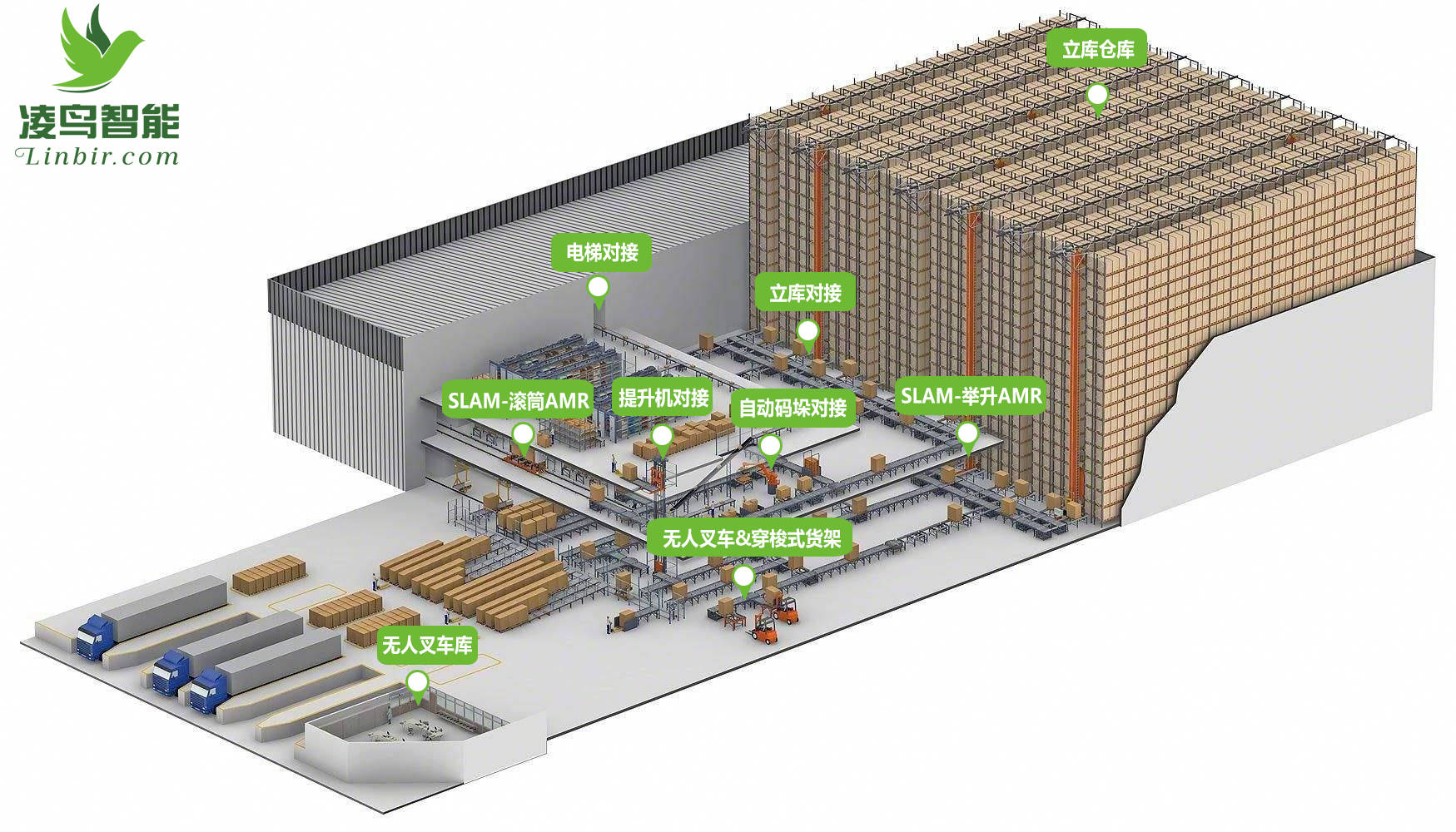
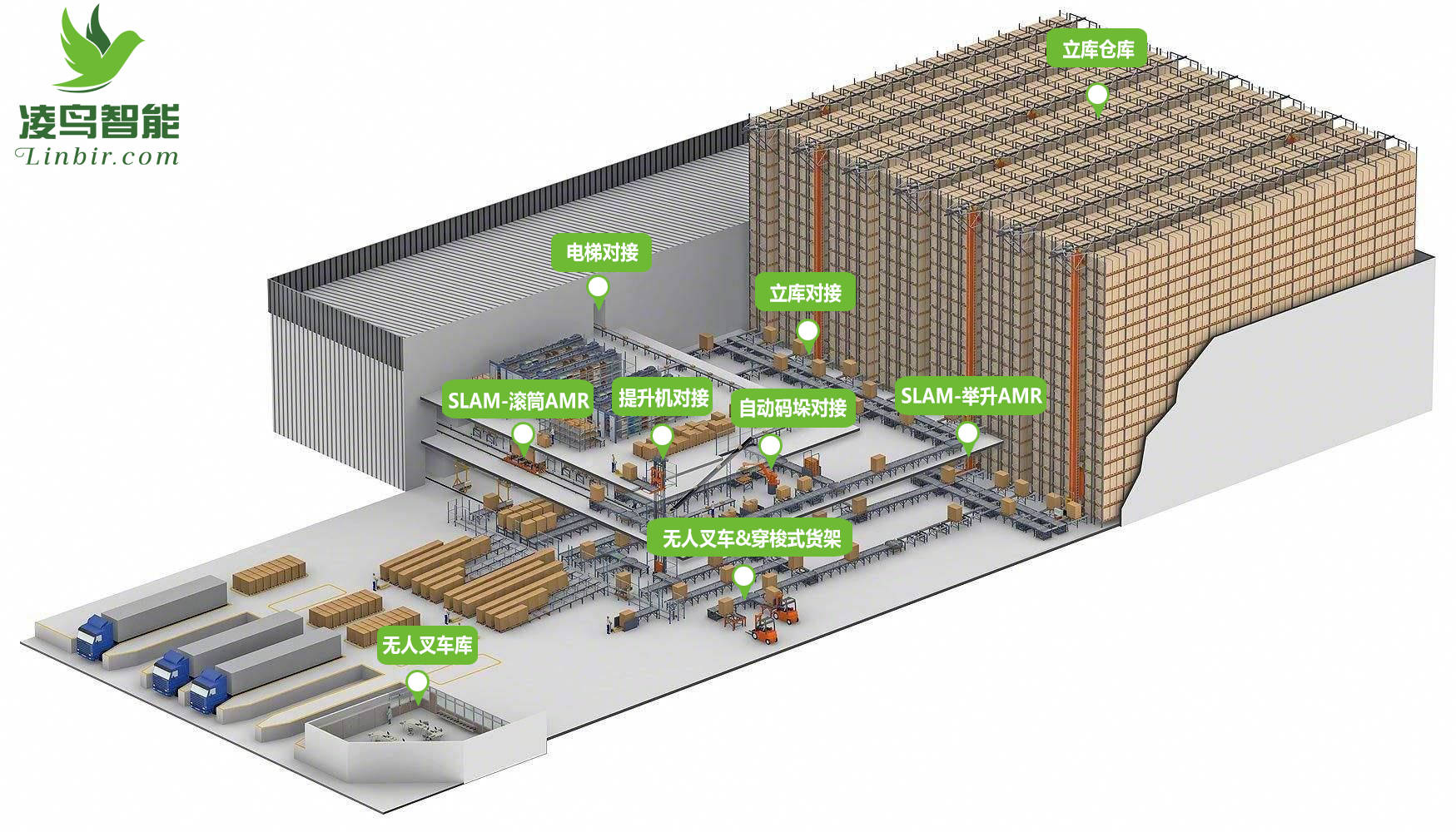
AGV立庫——重塑物流效率新標桿
AGV:智能制造時代的物流中樞
AGV機器人選型技術分析與應用策略
AGV:工廠里的隱形搬運工
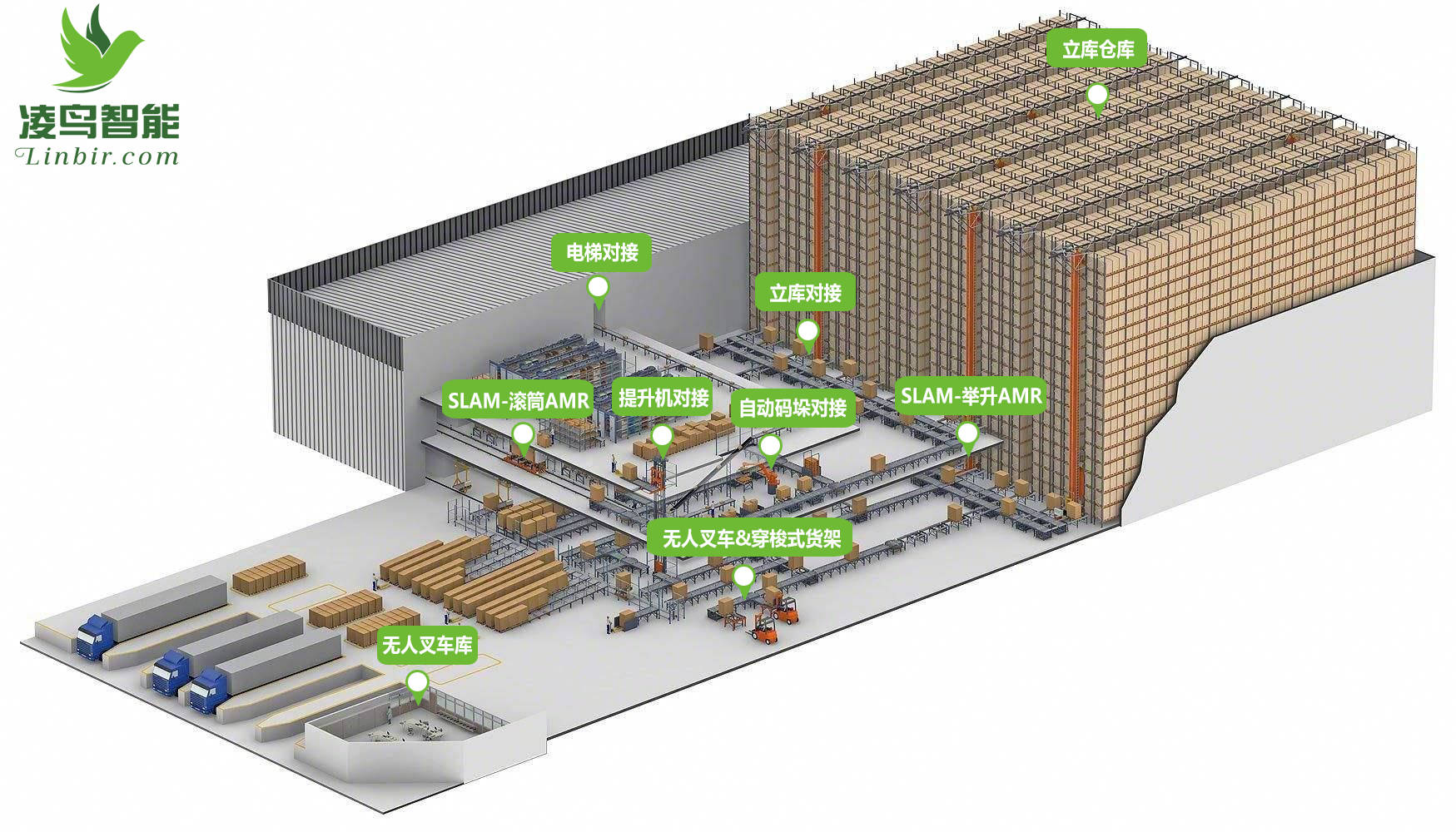
無人叉車AGV的智能物流樞紐邏輯:對接方式分類、技術原理及場景適配

AGV通信第1期 KAXA無線通信技術賦能AGV智慧物流系統升級

KAXA凱莎科技AGV通信方案如何賦能智能倉儲高效運作?
智慧工廠第2期 AGV集群通信:無線互聯技術賦能智慧工廠物流升級



 工商網監
工商網監
評論