當前不少人形機器人、四足機器狗等仍需遙控器操控行走,酷似大號遙控玩具。若能實現智能伴隨功能——自主跟隨主人身后、并行側方乃至引領前行,同步完成負重運輸、攝像頭跟拍等任務,將大幅升級用戶體驗,為消費級
2026-01-05 11:19:14 247
247 
全跡ONE1000具備以下核心特性:單錨點實現360°半球形3D定位;可復用為UWB雷達,檢測周圍人員存在,用于機器人低功耗休眠喚醒或其他智能交互;除了支持UWB標簽外,還可擴展支持
2026-01-05 11:07:25
的特性,重新定義精準搬運的未來。 富唯智能復合機器人創新性地將協作機器人的靈活操作、移動機器人的自主導航,以及先進的視覺引導技術融合于一體。其搭載的ICD系列核心控制器,實現了對整個系統的一體化控制,不僅提升了運
2025-12-31 17:01:221202 
達成真正意義上的無遙控自主移動。 當前需要什么樣的機器人?維他動力認為,需從三個維度考量:本體智能(小腦)、空間智能(大腦)、Agent智能(專業)。以無人機為例,其本體智能為四旋翼飛控系統,空間智能體現為雙目視覺避障能力,Agent智
2025-12-28 09:57:561623 近日,禾賽科技與高仙機器人正式宣布達成戰略合作,高仙商用清潔機器人將全線升級搭載禾賽 JT 系列 3D 激光雷達。此次合作,禾賽與高仙將共同推進清潔機器人在多場景中的自主導航與精準避障的能力升級,進一步助力智能清潔設備在商業、工業、公共服務等復雜環境區域內的工作效率、場景適應性與作業安全性。
2025-12-16 16:34:401171 近年來,隨著機器人技術不斷演進,傳統特定任務型機器人逐漸演變成更智能、自主的人形機器人。受勞動力短缺、AI 自動化需求提升等因素的推動,市場關注度和需求不斷提升,人形機器人正從概念走向規模化應用。
2025-12-15 10:05:061018 Pro則運行控制節點,通過Wi-Fi網絡接收Gazebo發布的傳感器信息(如激光雷達數據),并發布控制指令(速度指令)來驅動機器人模型移動和避障。
? 體驗: MUSE Pi Pro的K1 CPU在處理
2025-12-03 14:40:05
一、評測前言
非常感謝CW32生態社區,開源分享了許多比較好玩、優質的項目。這次活動都尾聲了還能有幸申請購買到 四足機器人+小車-智能小車(套件數量不多)的評測套件,多謝C32生態社區的大力支持
2025-11-24 23:44:54
3000W機器人雙工位翻轉平臺激光焊接機這款設備是現代高端智能制造的典型代表,它集成了大功率激光器、工業機器人、自動化雙工位翻轉平臺及先進控制系統,實現了高效率、高精度、高質量的自動化激光焊接。一
2025-11-24 13:56:24
前言隨著物聯網與智能移動設備的快速發展,高精度定位技術已成為AGV、智能跟隨設備及自動化系統的核心需求。穩傳測控推出的超寬帶基站定位板,采用國產UWB芯片與創新的PDOA算法,僅需單基站即可實現
2025-11-22 15:49:30
一、背景:機器人邁向“微米級控制時代”
隨著智能制造和自動化產業的持續升級,工業機器人不再僅僅承擔重復搬運,而是被要求在裝配、檢測、精密加工等高精度場景中完成微米級控制任務。
在這些“高精度機器人
2025-11-14 15:48:29
科義軌道式巡檢機器人:高精度智能巡檢解決方案精準定位系統:毫米級路徑控制技術科義軌道式巡檢機器人搭載激光導航系統,實現±5毫米級定位精度,支持多機協同作業,形成無死角巡檢網絡。
2025-11-06 09:44:02
機器人· 應用領域:迎賓機器人、養老機器人、導覽機器人· 多攝像頭輸入:同時實現人臉識別(迎賓)、跌倒檢測(養老)、自主導航避障(導覽)等多種視覺任務。· 多屏顯示:主機身屏幕提供功能操作,輔助屏幕向
2025-10-29 16:41:20
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
2025-10-23 05:24:26
核心技術,突破場景局限 科義履帶式巡檢機器人以 雙導航系統為核心,搭配綜合懸掛系統,輕松跨越復雜地形,實現靈活移動與≤30° 爬坡能力,7×24 小時全天候運行無憂。雙光云臺集成可見光
2025-10-16 10:29:44
服務機器人是一種以滿足人類生活、工作需求為核心,通過自主或半自主方式提供服務的智能機器人,與工業機器人專注于生產制造不同,其核心價值在于替代或輔助人類完成非生產性服務任務。
2025-10-15 10:09:141786 
的定義。機器人的定義,真如表面看起來那么簡單直白?還是比我們所認為的更為復雜呢? 從本質上講,機器人是一種可編程機器,能夠感知、處理信息,并自主或在一定程度的人工指令引導下執行任務。與傳統工具不同,機器人能夠依據環境變化進行自
2025-10-02 16:32:004452 
本白皮書聚焦于移動機器人領域的進展與挑戰,重點探討三個核心主題:機器人運動控制、復雜環境中的感知與導航,以及在適應新任務時的模塊化與靈活性。此外,文中還重點介紹了機器人系統從簡單的固定機械臂到復雜人形機器人的演進歷程,強調了具身智能在實現多功能高靈活性機器人中的重要性。
2025-09-29 16:46:213023 GTS運動機器人位置標定激光跟蹤儀是建立在激光和自動控制技術基礎上的一種高精度三維測量系統,主要用于大尺寸空間坐標測量領域。它集中了激光干涉測距、角度測量等技術,基于球坐標法測量原理,通過測角、測距
2025-09-18 13:49:42
在現代工業場景中,自主移動與精準操作相結合的復合機器人正逐漸成為智能制造的核心裝備之一。集協作機器人、移動機器人和視覺技術于一身的富唯智能復合機器人,不僅擴展了機械臂的工作范圍,更通過智能感知與實時
2025-09-16 17:02:05698 
在德國,自主生產目前主要被選擇性地用于工具層面,例如質量保證或過程監控。機器人應用層面是一個特別有活力的領域,在這一層面,正在創建半自動化自動化單元。這是向完全網絡化生產系統邁出的第一步。智能生產員工
2025-09-15 15:08:01
今天給大家分享一款人工智能AGV自主導航小車,該款小車主要是基于NXPi.MX8MPlus主控。i.MX8MPlus應用處理器是NXP推出的一款致力于推動機器學習(ML),機器視覺,多媒體與工業邊緣
2025-09-10 17:04:48703 
中圖儀器GTS運動機器人位置激光跟蹤儀集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工
2025-09-09 15:05:00
長期以來,自動化機器人一直被視為科幻小說中的概念,而如今這一技術已成為現實,并正在大規模部署。在機器人技術領域,自主移動機器人 (AMR) 是發展最快的創新技術之一。
2025-09-03 15:01:443889 
引言隨著人工智能、大數據、傳感器技術和先進驅動技術的發展,人形機器人在制造業、醫療、服務業和家庭助手等領域展現出巨大潛力。其核心競爭力在于高精度運動控制、強大計算與決策能力,以及在復雜環境中的自主
2025-08-30 10:56:281573 
在工業自動化和智能醫療快速發展的今天,富唯智能憑借先進的復合機器人力控技術,推出了新一代復合機器人解決方案。該方案深度融合協作機器人、自主移動機器人(AMR)及高精度視覺引導技術,在多類復雜場景下實現超柔性、高精準的作業能力,顯著提升流程自動化水平。
2025-08-26 16:54:26620 正運動線路板跟隨灌膠解決方案
2025-08-26 11:13:37596 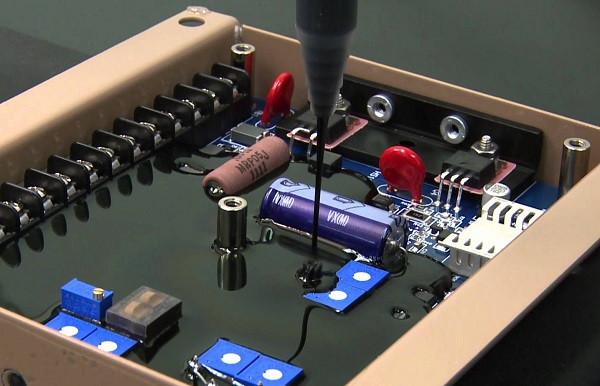
幫助機器人實時修正重心,大幅降低翻倒風險。
在關節運動控制上,磁傳感器芯片實現 “毫米級精度保障”。以昆泰芯 KTM59 系列磁編碼器的離軸應用為例,其非接觸式磁信號捕捉技術,解決了傳統光學編碼器在
2025-08-26 10:02:02
個賽項的487場比拼。賽事不僅呈現了精彩競技瞬間,更成為人形機器人技術進步的集中展示窗口。技術突破:從遙控到自主本屆運動會的顯著特點是機器人全自主能力的突破。北京
2025-08-22 14:49:001589 
正運動喇叭跟隨點膠解決方案
2025-08-19 10:59:30769 
醫院HDU高依賴康復病房病人/養老場景易發病老人江智病癥監護機器人JZR15605201應用場景:專對醫院HDU高依賴康復病房病人病癥監護專對養老場景易發病老人病癥監護2 機器人
2025-08-18 16:19:17
電子發燒友網綜合報道 割草機器人的避障技術是其智能化水平的核心體現,主要通過傳感器技術、環境感知算法和路徑規劃方法實現安全、高效的自主作業。隨著智能化水平提升,割草機器人避障正從單一傳感器向多模態
2025-08-17 00:03:003972 一分鐘速覽:從設備連接到編程控制,演示關節機器人的±180度精準轉動。關節機器人±180度轉動例程在科技高度發達今天,越來越多的智能機器人進入我們的日常生活中。究竟這些機器人是如何實現運動?工程師
2025-08-15 11:36:07684 
UWB為什么是最靠譜的自動跟隨技術?原理是什么?需要做什么算法融合、優化?我們在開發過程中踩過的坑。
2025-08-14 17:45:501265 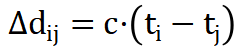
,車身可定制物料緩存架。應用場景1、自動上下料:AGV自主導航結合機械臂柔性抓取,實現跨工序物料轉運、CNC精準上下料。單機器人可服務多臺CNC設備,適應多品種、小批
2025-08-13 15:52:54
。技術優勢經世智能復合機器人產品使用了自主研發的復合機器人一體化控制系統和復合機器人車身姿態動態補償技術,有效保障抓取的精度和穩定性,抓取綜合重復定位精度達到行業領先的
2025-08-13 13:53:28
產品簡介經世智能檔案存取復合機器人,在智慧檔案庫房行業主要應用于檔案自動存取與轉運、涉密檔案管理等環節,通過“AGV移動底盤+協作機械臂+視覺系統”一體化控制方案實現高效自動化作業。機器人機械臂末端
2025-08-13 13:36:24
產品簡介經世智能半導體行業晶圓盒轉運復合機器人,復合機器人在半導體行業主要應用于晶圓盒轉運、機臺上下料等環節,通過“AGV移動底盤+協作機械臂+視覺系統"一體化控制方案實現高效自動化作業。機器人
2025-08-13 13:28:39
控制方案實現高效自動化作業。機器人機械臂末端可定制末端夾具,車身可定制物料緩存架。技術優勢經世智能復合機器人產品使用了自主研發的復合機器人一體化控制系統和復合機器人
2025-08-13 10:06:22
夾具,車身可定制物料緩存架。技術優勢經世智能復合機器人產品使用了自主研發的復合機器人一體化控制系統和復合機器人車身姿態動態補償技術,有效保障抓取的精度和穩定性,抓
2025-08-13 09:47:30
新一代視覺避障模組
2025-08-08 15:54:25688 的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。而智能制造裝備中工業
2025-07-26 11:22:07
換電系統。根據介紹,這款機器人的核心技術在于機器人無需人工干預或關機,可以在3分鐘內實現自主換電。 ? 這項技術避免了因充電停機導致的任務中斷,可連續作業,另一方面,人形機器人自主換電可以減少人力維護成本,提升整體生產效率。可以實現24/7連續
2025-07-24 09:44:363776 
在科技的浩瀚星空中,機器人領域無疑是一顆璀璨的明星。而在機器人的關鍵技術中,運動控制宛如機器人的“神經系統”,直接影響著機器人的性能表現。今天,我們要聚焦的主角——MT6701磁編芯片,正以其卓越的性能,開創著機器人運動控制的新時代。
2025-07-23 18:18:08702 隨著工業自動化進程加速,工廠正日益依賴先進機器人技術來提升生產力和運營韌性。在工業環境成功部署機器人的關鍵在于精準運動規劃、精確空間感知及可靠避障等能力。AI 驅動的機器人技術與軟件定義的自動化有助于提高工廠的自動化、可擴展性和抗風險能力,高性能機器人軟件已成為現代制造業不可或缺的核心要素。
2025-07-14 11:43:471112 實現應用. 工作流程為:1) 收到充電指令后, 天軌搭載機器人移動到對應的充電樁, 移動過程中3D智能相機偵測移動前方是否有障礙物, 3D相機偵測充電槍
2025-07-07 08:47:04
當自動駕駛算法應用于真實道路和物流運輸,當專業級機械臂走進課堂示教編程,在這個人工智能與機器人技術的快速發展的時代,人們不再滿足于基礎編程實踐,而是渴望在仿真環境中探索多機協同算法等前沿課題。與此同時,實驗室對機器人模擬場景中測試識別、抓取、避障、搬運全鏈路也提出了更高期待。
2025-07-02 16:35:15907 
在機場的洶涌人潮中,一只行李箱自主避讓行人,穩穩跟隨主人穿越安檢區;在智慧工廠里,載貨小車精準識別操作員位置,自主規劃路徑并行進——這些曾屬于科幻電影的景象,正通過飛睿智能UWB技術成為現實。當行李箱學會“認主”,當物流小車擁有“方向感”,一場由厘米級空間感知引發的移動革命已然到來。
2025-06-30 11:20:321453 
OriginBot是一款智能機器人開源套件,搭載地瓜RDKX5開發板,通過完全開源的TuyaOpen開發框架(點擊查看TuyaOpen能開發哪些AI硬件?),能夠實現激光雷達避障、智能聯網、目標檢測
2025-06-26 18:35:241539 
從被動避障到主動預判,視覺避障技術比預想的更快實現。
2025-06-18 14:09:37964 機器人的“姻緣簿”上,它們竟成了最佳“CP”,聯手解決設備通信難題。
耐達訊通信技術CC-Link IE基于以太網,擅長快速處理海量數據,就像工業界的“閃電快遞員”;DeviceNet網關作為現場總線
2025-06-12 14:35:10
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動機器人電機驅動
2025-06-11 14:30:14
隨著機器人技術的快速迭代升級,協作機器人、復合移動機器人和人形機器人等新興應用場景對實時控制與智能決策的深度融合提出了迫切需求。然而,當前機器人操作系統架構面臨以下關鍵挑戰:算力瓶頸制約智能化發展
2025-06-09 09:23:181387 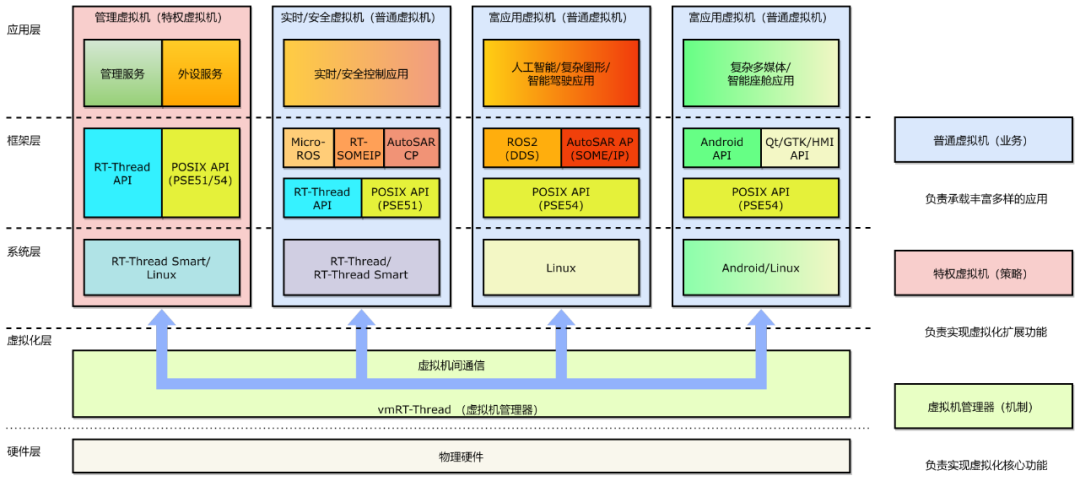
已成為核心競爭力。CCLINKIE轉Profinet網關的價值,不僅是解決“語言不通”的表層問題,更是通過協議互聯釋放設備潛能——正如某主機廠技術總監所言:“在智能制造時代,能讓10年前的設備與最新機器人并肩作戰,才是真正的降本增效。”
2025-06-04 14:31:21
MOVESYNC指令實現同步/皮帶跟隨應用
2025-06-04 11:17:53729 
。本文將聚焦于其核心的高精度驅動與實時控制技術,展示ADI如何提供從指尖到關節的全棧解決方案,賦能機器人實現更卓越的運動性能。
2025-05-30 10:03:032009 
STM32+Android實現的智能家政機器人電路代碼論文及項目部分截圖:
2025-05-28 21:22:43
一、AGV多傳感器融合實時避障系統介紹 1.簡介 傳感器融合技術是機器人實現全覆蓋避障的關鍵,其原理仿效人腦綜合處理信息的方式:通過協調多種傳感器(如激光雷達、視覺攝像頭等)進行多層次、多維度的信息
2025-05-28 14:21:231163 
在人工智能快速發展的今天,語音機器人逐漸成為人們生活和工作中的得力助手。明遠智睿SSD2351開發板憑借強大性能與豐富功能,為語音機器人的發展注入新動力,成為該領域的變革力量。 SSD2351開發板
2025-05-28 11:36:54
今天為大家推薦一款功能強大的STM32多功能智能小車——華清遠見STM32F103智能云控小車。這款小車集紅外遙控、遠程物聯控制、智能循跡、超聲波避障和交互式顯示屏五大核心功能于一體,融合了物聯網云
2025-05-16 17:11:141938 
圖,電子技術資料網站具身智能機器人****開發平臺——Fibot廣和通發布機器人開發平臺-電子發燒友網NVIDIA Isaac 英偉達綜合性機器人開發平臺NVIDIA Isaac 是英偉達推出的綜合性機器人開發平臺-電子發燒友網
2025-05-13 15:02:04
路徑。路徑規劃算法會考慮多種因素,如距離最短、避開人流密集區域、優先選擇寬闊通道等,以確保旅客能夠快速、順暢地到達目的地。
實時導航與避障 :在機器人引導旅客的過程中,導航系統會實時監控機器人的運動狀態
2025-05-10 18:26:31
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和自主導航的核心技術有了更深入的理解。以下是我的心得體會
2025-05-03 19:41:47
//在機器人跟隨、智能物流、消費服務等領域,傳統視覺識別與激光雷達技術長期面臨復雜環境適應性不足的挑戰:光線突變、障礙物遮擋、動態目標丟失等問題頻發,導致設備響應延遲、軌跡偏移甚至跟丟目標。UWB
2025-04-30 18:20:58817 
的非常好的,特別是一些流程圖,很清晰的闡釋了概念
很適合作為初學者入門的引路書
還能了解很多技術和框架,破除初學者的自負困境,讓初學者知道功能是由很多開發者維護的,前人已經為各種產品搭建了完善的框架。避免陷入得一個人單打獨斗的錯覺
一直蠢蠢欲動ros2和機器人的同學,有了這本書就行動起來吧!
2025-04-30 01:05:09
的知識,還需要對ROS 2的節點通信和數據處理有一定的了解。通過實踐這一部分內容,我掌握了如何在ROS 2中實現二維碼識別,這對于提高機器人的智能性和交互性具有重要意義。
地圖構建:SLAM技術
2025-04-27 11:42:22
應用案例:書中提供了多個機器人應用案例,幫助讀者將所學的 ROS 2 知識應用到實際的機器人項目中。例如,在自主移動機器人案例中,詳細講解了如何實現機器人的自主導航、避障、任務執行等功能,包括硬件選型
2025-04-27 11:24:32
摘要 :隨著機器人技術的飛速發展,對運動控制系統的性能要求日益嚴苛。本文聚焦于基于先進MCU(微控制單元)的機器人運動控制系統設計,深入剖析其理論基礎、實踐方法與前沿技術。以國科安芯的MCU芯片
2025-04-27 10:58:41761 識別聯調。
進迭時空致力于為智能機器人提供完整全棧優化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI視覺感知、AI語音處理、自動避障、路徑規劃、運動控制等
2025-04-25 17:59:18
肇觀智能自主防護傳感器IOCAMERA-M1基于雙目主動光技術,以抗強光干擾、多場景適配、RGB-D時空對齊、內置避障算法直接輸出通行/減速/停車信號、不占用上位機算力為核心優勢,助力移動機器人從室內到室外,從低速到高速,無需上位機算力避障方案的全場景智能化升級;
2025-04-24 17:29:07875 
近日,人形機器人技術要求系列國家標準正式獲批立項,在全國機器人標準化技術委員會(TC591)秘書處承擔單位北京機械工業自動化研究所有限公司的統籌下,優必選聯合北京人形機器人創新中心有限公司、上海人工智能
2025-04-24 15:09:12727 在機器人技術、人工智能技術飛速發展的今天,全球機器人產業正在加速重構,據智庫數據顯示,2025年中國教育機器人市場規模將突破800億元,其中高校實驗室設備采購占比超40%。中國教育機器人生態正從“技術跟隨”邁向“自主定義”的關鍵轉折。
2025-04-16 15:21:361493 
摘要大象機器人全新推出輕量級高性能教育機械臂myCobot280RDKX5,該產品集成地瓜機器人RDKX5開發者套件,深度整合雙方在硬件研發與智能計算領域的技術優勢,實現芯片架構、軟件算法、硬件結構
2025-04-15 22:05:051185 
GTS機器人位置精度激光跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機。它集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,主要用于百米大尺度空間三維坐標
2025-04-14 11:00:17
正運動龍門跟隨點膠解決方案
2025-04-01 10:40:58625 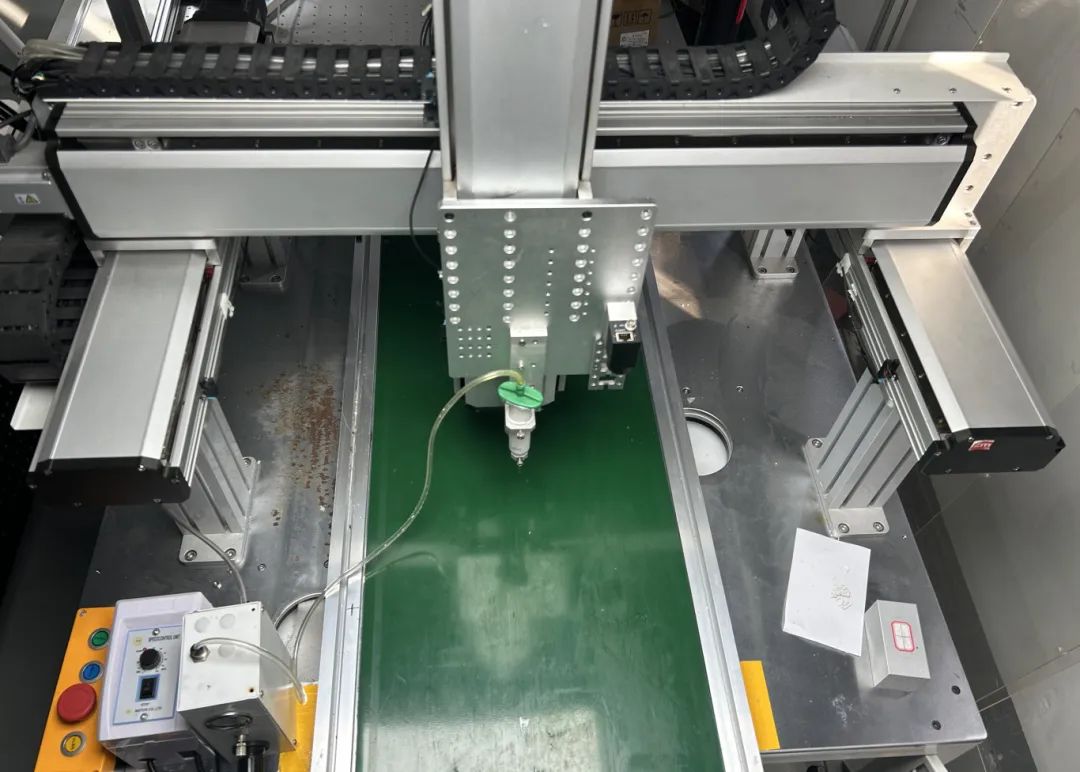
在工業4.0與智能制造深度融合的今天,傳統路徑規劃算法已難以滿足動態生產環境的需求。面對復雜場景下的高精度避障、實時決策與多任務協同挑戰,具身智能工業機器人路徑規劃算法成為破局關鍵。作為具身智能領域
2025-03-28 15:01:53844 機器人激光焊接機:高精度自動化焊接的未來1. 概述機器人激光焊接機是一種集成了工業機器人和激光焊接技術的先進自動化設備,通過高能量密度的激光束實現快速、精準的焊接。該系統結合了機器人的靈活運動
2025-03-28 14:04:12
在工業4.0與人工智能深度融合的浪潮中,“什么是具身智能工業機器人”成為制造業智能化轉型的核心議題。作為具備自主感知、決策與執行能力的下一代工業設備,具身智能工業機器人不僅重新定義了生產效率,更將
2025-03-21 14:47:441773 
近期,石頭科技發布新一代旗艦掃地機器人G20S和G30,主打智能化清潔和友好人機交互。其中,G20S集成高精度3D-TOF固態激光雷達,替代傳統外置LDS,導航技術精度和穩定性更高,完美避障;多
2025-03-19 11:24:511219 
在現代工業生產中,工業機器人工作站的建設已成為提升生產效率和產品質量的關鍵舉措。隨著自動化技術的不斷發展,工業機器人工作站不再局限于單個機器人的作業,而是通過整合工裝夾具、多臺機器人協同工作以及
2025-03-17 14:49:02
在智能機器人與高端設備的世界里,關節電機驅動是賦予它們靈動身姿的關鍵。它集成電機、減速器、傳感器和驅動電路,精準控制運動。本文將深入剖析其核心技術,揭秘兩款高性能驅動模塊,一同探尋智能運動的奧秘
2025-03-13 11:37:452395 黑芝麻智能與中國科學院院士、武漢大學工業科學研究院執行院長劉勝院士團隊正式達成戰略合作,共同聚焦人形機器人領域的技術突破與創新應用。此次合作以武漢大學自主研發的首個人形機器人“天問”為核心載體
2025-03-12 18:00:201643 研華科技近日舉辦“智能自主系統與機器人應用伙伴高峰論壇”,將攜手生態伙伴,打造靈活且ROS兼容的機器人解決方案。
2025-03-11 13:46:36750 一、移動機器人的核心技術有多難? 在智能化浪潮推動下,可移動智能硬件系統的應用正從服務于家庭的清潔機器人,逐步擴展至工/商業服務領域。而要想實現這類系統在精細場景下的靈活應用,核心技術就在于能夠實現
2025-03-07 19:01:49552 正運動天地蓋同步跟隨貼合解決方案
2025-03-06 14:29:38587 
講解使用ROS 2開發機器人視覺識別、地圖構建和自主導航等眾多應用的方法,讓機器人不僅動得了,還能看懂和理解周圍的環境,并且產生進一步的交互運動。
本書特色
本書采用 最新穩定版本ROS 2系統和全新
2025-03-03 14:18:22
慣性測量單元(IMU)傳感器可實現機器人的定位與導航,已成為機器人精確定位的重要組成部分。IMU集成了加速度計、陀螺儀和磁力計,通過提供實時響應,使機器人能夠準確地確定其方向、位置和運動,從而
2025-02-27 10:04:051812 
機器人起身站立的控制技術一直存在很多難題,據央視報道,近期,上海人工智能實驗室和上海交通大學發布算法技術,使人形機器人在可泛化地形上快速穩定站立,這意味著人形機器人可從各種狀態下實現快速、穩定地站立
2025-02-26 15:01:051145 正運動電煮鍋底座跟隨點膠解決方案
2025-02-25 10:50:19685 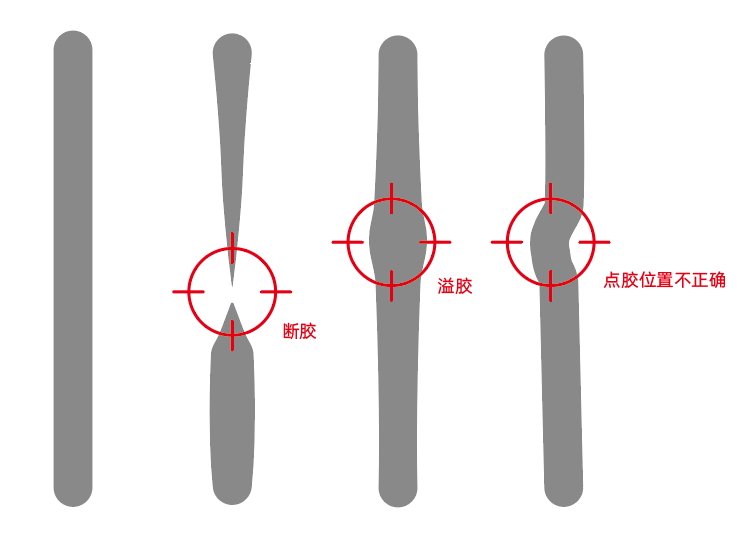
突破傳統避障局限,視覺方案為服務機器人拉滿安全感。
2025-02-21 16:27:29772 
結構設計,更輕、更小、更緊湊? 快速組裝人形機器人手臂,大幅縮短開發周期 人形機器人手臂輕量化人形機器人關節人形機器人關節參數
2025-02-21 15:04:19
HJR系列帶力控旋轉關節模組? 專為人形機器人應用研發,提供定制化服務? 集諧波減速器、電機、抱閘、編碼器、驅動器、扭矩傳感器于一體? 創新的諧波減速器結構,讓關節模組整體輕量化程度進一步提升
2025-02-21 14:59:52
HJL系列行星滾柱絲杠線性關節模組? 專為人形機器人應用研發,提供定制化服務? 集行星滾柱絲杠、電機、編碼器、拉壓力傳感器于一體? 強大推力,性能強勁,穩定可靠? 精巧結構設計,整體輕量化程度進一步
2025-02-21 14:55:54
電壓跟隨器與電流跟隨器在電子電路中各具特色,以下是對兩者的比較: 一、定義與工作原理 電壓跟隨器 : 定義:也稱為緩沖放大器或射極輸出器,是共集電極電路的一種。信號從基極輸入,射極輸出,具有高
2025-02-18 16:03:441532 電壓跟隨器的頻率響應是指其對不同頻率信號的響應能力,主要受到其內部電路結構和元件特性的影響。以下是對電壓跟隨器頻率響應的分析: 一、頻率響應特性 寬帶寬 : 電壓跟隨器通常具有較寬的頻率響應范圍,這
2025-02-18 15:42:001102 (AI)的圖像處理技術的創新企業,尤其在移動機器人定位領域擁有卓越的技術實力和豐富的經驗。其先進的AI算法和圖像處理技術,為移動機器人提供了精準、可靠的定位能力,極大地提升了機器人的自主性和智能化水平。 此次收購對于SICK來說,具有重要的戰略意義。通過整合Ac
2025-02-14 10:24:00932 將伺服電機自身優勢轉變成精確速度控制、精確位置控制和精確推力控制,從而實現高精度直線運動。這種特性使其成為人形機器人的核心運動部件,特別是在關節驅動方面。二、替代傳統驅動方式在人形機器人中,伺服電動缸
2025-02-06 09:04:39
是機器人感知環境的重要部件,如同機器人的 “眼睛”,能夠幫助機器人獲取周圍環境的三維信息、識別物體和障礙物等,為機器人在復雜環境下的導航、避障和操作提供了關鍵支持。
傳感器技術應用拓展:隨著物聯網
2025-02-04 06:48:00
?在機器人技術的發展中,“大腦+小腦”的架構模式逐漸成為推動機器人智能化的關鍵。其中, “大腦”作為機器人的核心決策單元,承擔著復雜任務規劃、環境感知和決策制定的重要角色,而“小腦”則專注于運動控制
2025-01-20 13:35:201017 ? 四足機器人憑借其獨特的地面接觸方式和對復雜地形的出色適應能力,已成為自動化與機器人工程技術研究的焦點。近年來,在結構設計、運動規劃和平衡控制等關鍵方面,四足機器人已取得重要進展。然而,如何進
2025-01-20 10:15:284067 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論