") UWB跟隨技術(shù)賦能機(jī)器人智能伴隨新體驗(yàn)
UWB跟隨技術(shù)賦能機(jī)器人智能伴隨新體驗(yàn)

當(dāng)前不少人形機(jī)器人、四足機(jī)器狗等仍需遙控器操控行走,酷似大號(hào)遙控玩具。
若能實(shí)現(xiàn)智能伴隨功能 —— 自主跟隨主人身后、并行側(cè)方乃至引領(lǐng)前行,同步完成負(fù)重運(yùn)輸、攝像頭跟拍等任務(wù),將大幅升級(jí)用戶體驗(yàn),為消費(fèi)級(jí)與企業(yè)級(jí)場(chǎng)景拓展更多應(yīng)用空間。
現(xiàn)階段智能伴隨的主流技術(shù)主要有兩種:一種是視覺方案,另一種是 UWB(超寬帶)定位方案。純視覺方案雖具備直觀感知的優(yōu)勢(shì),但存在顯著技術(shù)局限:攝像頭易受環(huán)境遮擋形成視覺盲區(qū);多人員場(chǎng)景下,若第三方介入機(jī)器人與跟隨目標(biāo)之間,極易引發(fā)目標(biāo)丟失;且當(dāng)機(jī)器人處于目標(biāo)后方或側(cè)方時(shí),人臉識(shí)別功能完全失效,轉(zhuǎn)而依賴背影、衣著體態(tài)等特征識(shí)別,穩(wěn)定性欠佳。
在實(shí)際應(yīng)用中,若要構(gòu)建高穩(wěn)定性、多場(chǎng)景適配的智能伴隨系統(tǒng),UWB 技術(shù)成為關(guān)鍵支撐。作為無線電定位領(lǐng)域公認(rèn)的最高精度技術(shù),UWB 的應(yīng)用方式極為便捷:主人僅需隨身攜帶一枚輕巧的 UWB 標(biāo)簽(如蘋果AirTag防丟器、汽車鑰匙的大小),或直接使用支持UWB功能的手機(jī)、手表;同時(shí)在機(jī)器人本體安裝UWB定位錨點(diǎn),機(jī)器人即可通過 UWB 信號(hào)實(shí)時(shí)捕捉主人位置,實(shí)現(xiàn)精準(zhǔn)、穩(wěn)定的智能伴隨。
當(dāng)前UWB伴隨主要存在以下幾類技術(shù)路徑:
多錨點(diǎn)TOF(飛行時(shí)間)定位
在機(jī)器人本體上布置至少3個(gè)UWB錨點(diǎn),基于TOF原理計(jì)算標(biāo)簽位置。
優(yōu)點(diǎn):原理簡(jiǎn)單,軟硬件易于實(shí)現(xiàn)。缺點(diǎn):由于機(jī)器人向地面的投影面積有限,多個(gè)錨點(diǎn)的間距在水平面上難以拉大(例如50cm以上),定位精度受到影響;錨點(diǎn)數(shù)量上升帶來成本增加;金屬機(jī)身對(duì)UWB信號(hào)遮擋明顯,對(duì)錨點(diǎn)的位置布局挑戰(zhàn)大。
UWB-AOA(到達(dá)角)結(jié)合TOF定位
利用UWB錨點(diǎn)的天線陣列測(cè)量信號(hào)到達(dá)角度(亦稱PDoA,到達(dá)相位差),結(jié)合TOF測(cè)距實(shí)現(xiàn)定位。該方案又可細(xì)分為:
方案一:?jiǎn)五^點(diǎn)固定式
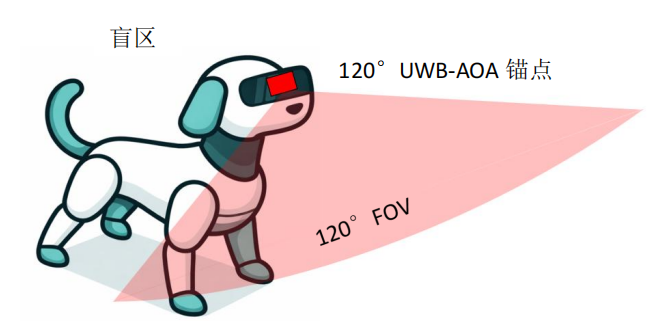
在機(jī)器人前方安裝一個(gè)120°FOV(視場(chǎng)角)的UWB-AOA錨點(diǎn)。此方案軟硬件設(shè)計(jì)難度不算大,但在機(jī)器人后方與側(cè)方存在定位盲區(qū),需要主人刻意走到機(jī)器人前方才能被定位到,或者機(jī)器人主動(dòng)旋轉(zhuǎn)才能找到主人的位置。此方案可以支持機(jī)器人在主人身后的有限自主跟隨,但無法讓機(jī)器人智能伴隨在主人側(cè)方甚至走在前方。
方案二:多錨點(diǎn)組合式

在機(jī)身不同方位安裝多個(gè)120°FOV的UWB-AOA錨點(diǎn),以擴(kuò)大FOV覆蓋范圍。但成本和功耗顯著提高,模塊間協(xié)同處理復(fù)雜,且仍可能存在盲區(qū)。
方案三:旋轉(zhuǎn)掃描式

將一個(gè)120°FOV的UWB-AOA錨點(diǎn)安裝在電機(jī)上,實(shí)現(xiàn)類似機(jī)械雷達(dá)的360°旋轉(zhuǎn)掃描,但在可靠性與安裝布局上面臨較大挑戰(zhàn),目前已經(jīng)很少有這種方案落地。
方案四:360°單錨點(diǎn)
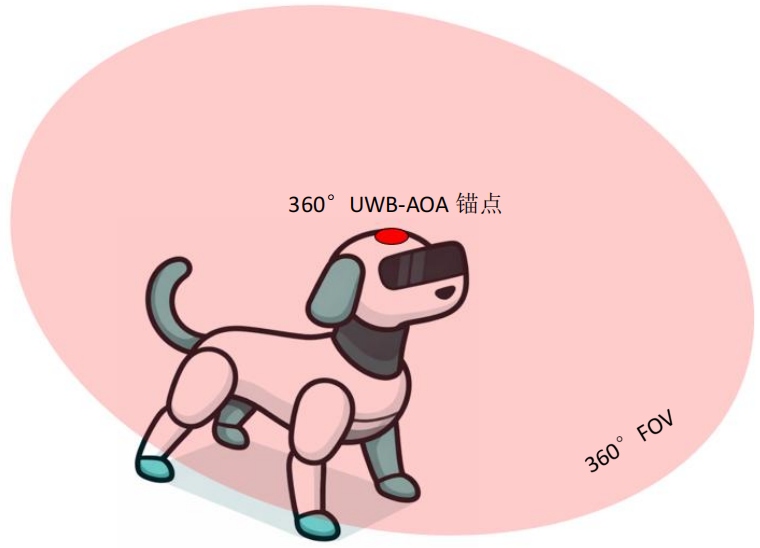
采用單個(gè)可實(shí)現(xiàn)360°FOV的UWB-AOA錨點(diǎn)。此種方案系統(tǒng)簡(jiǎn)潔、成本可控,但對(duì)UWB天線陣列的設(shè)計(jì)與算法要求非常高,從原型機(jī)到成熟可商用還存在很大的鴻溝,目前僅有極少數(shù)廠商有實(shí)際落地經(jīng)驗(yàn),此方案最有應(yīng)用前景。
全跡科技專注UWB定位近10年,可提供上述方案四。
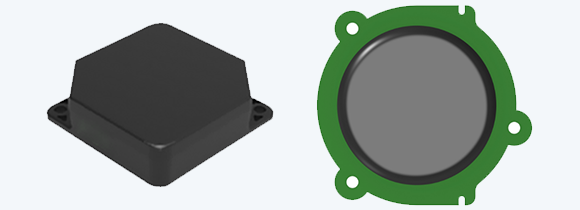
全跡已推出適合機(jī)器人智能伴隨應(yīng)用的小型化360°UWB-AOA錨點(diǎn)(型號(hào)ONE1000),并配合國(guó)內(nèi)頭部機(jī)器人初創(chuàng)公司維他動(dòng)力在Vbot超能機(jī)器狗上率先量產(chǎn)落地。
全跡ONE1000具備以下核心特性:
- 單錨點(diǎn)實(shí)現(xiàn)360°半球形3D定位;
- 可復(fù)用為UWB雷達(dá),檢測(cè)周圍人員存在,用于機(jī)器人低功耗休眠喚醒或其他智能交互;
- 除了支持UWB標(biāo)簽外,還可擴(kuò)展支持UWB手機(jī)與手表;
- 特殊天線設(shè)計(jì)保證了對(duì)UWB標(biāo)簽朝向不敏感,佩戴自由,無需刻意固定方向;
- 采用符合最新法規(guī)的CH9頻段,適用于全球市場(chǎng);
- 尺寸44mm x 5mm,UART數(shù)據(jù)接口,單3.3V供電;
- 核心芯片與生產(chǎn)工藝符合車規(guī)級(jí)標(biāo)準(zhǔn),具備高可靠性。
全跡 UWB-AOA 技術(shù)切實(shí)解決了跟隨盲區(qū)、天線朝向敏感、成本高昂等行業(yè)痛點(diǎn),為機(jī)器人智能伴隨這一領(lǐng)域的新興需求提供高可靠性的技術(shù)與產(chǎn)品支撐。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31074瀏覽量
222189 -
UWB
+關(guān)注
關(guān)注
33文章
1274瀏覽量
65158
發(fā)布評(píng)論請(qǐng)先 登錄
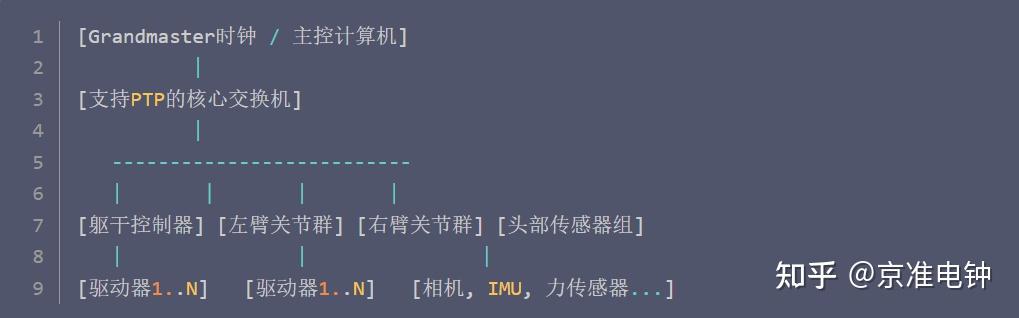
安徽京準(zhǔn):PTP時(shí)鐘同步精準(zhǔn)賦能AI機(jī)器人
UWB技術(shù)在機(jī)器人領(lǐng)域的創(chuàng)新應(yīng)用與前景

ALVA純視覺系統(tǒng)賦能具身智能機(jī)器人發(fā)展
工業(yè)人形機(jī)器人價(jià)格區(qū)間:賦能智能制造的新選擇

圖達(dá)通靈雀W賦能中力智能搬運(yùn)機(jī)器人,共筑智能物流新標(biāo)桿
工業(yè)機(jī)器人的特點(diǎn)
《人民日?qǐng)?bào)》報(bào)道!中科億海微“中國(guó)芯”賦能具身智能機(jī)器人

厘米級(jí)精準(zhǔn)定位+低功耗通信,飛睿智能UWB技術(shù)賦能機(jī)器人高效作業(yè)

厘米級(jí)精準(zhǔn)定位+低功耗通信,飛睿智能UWB技術(shù)賦能機(jī)器人高效作業(yè)

華沿機(jī)器人:以協(xié)作機(jī)器人技術(shù)賦能汽車智能制造新時(shí)代

成本下降+算法突破,UWB技術(shù)是否迎來在割草機(jī)器人領(lǐng)域爆發(fā)的拐點(diǎn)?

橋接智能制造:PROFINET與Devicenet混合架構(gòu)賦能汽車擦凈機(jī)器人升級(jí)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論