 關節電機驅動,解鎖智能機器人 的“靈動” 密碼
關節電機驅動,解鎖智能機器人 的“靈動” 密碼

在智能機器人與高端設備的世界里,關節電機驅動是賦予它們靈動身姿的關鍵。它集成電機、減速器、傳感器和驅動電路,精準控制運動。本文將深入剖析其核心技術,揭秘兩款高性能驅動模塊,一同探尋智能運動的奧秘。
 ?前言
?前言
什么是關節電機?簡單來說,它就好像人體的關節一樣,可以精確控制機器人的運動姿態,是機器人的核心動力部件。它將電機、減速器、傳感器和驅動電路集成在一起,能夠實現高精度的旋轉或直線運動,是四足機器狗、人形機器人、協作機械臂等設備的動力核心部件。
 ?關節電機:運動設備的“心臟”
?關節電機:運動設備的“心臟”
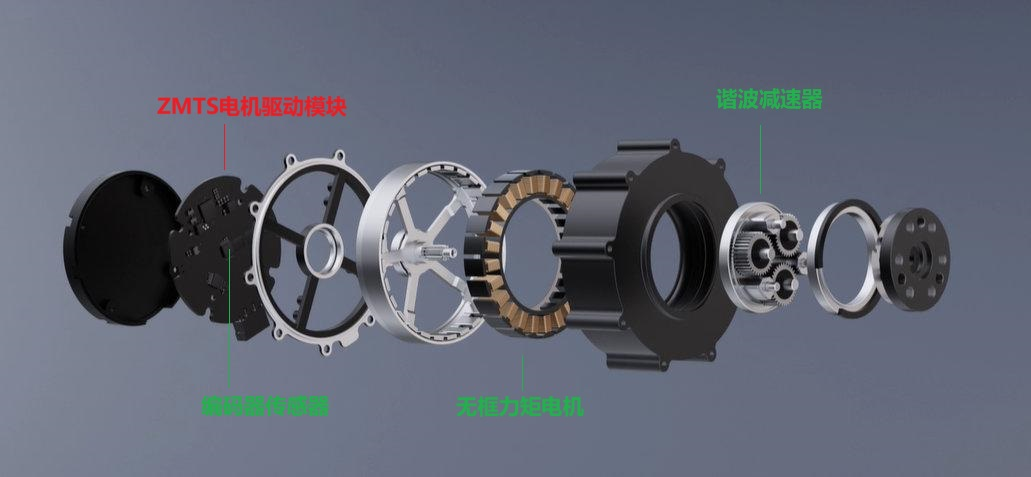
關節電機主要由以下四大核心組件構成,既保證了高扭矩密度,又實現了緊湊的空間布局:
1. 無框力矩電機
一般為外轉子式無刷直流電機,電機的轉子直接嵌入設備關節軸,定子與負載剛性連接,這樣就可以省去了傳統外殼,大幅減小體積。其扭矩密度高達35N·m/kg,非常適合仿生機器人、協作機械臂等對空間敏感場景。電機常用電壓為24V~48V,功率范圍為50W~1000W。
2. 諧波減速器
采用柔輪與波發生器的彈性嚙合結構,減速比為30:1~160:1,傳動效率超過85%,實現零背隙動力輸出,重復定位精度可達1弧分以內。
3. 高精度編碼器
集成17位(或更高精度)的絕對值編碼器,可實時反饋位置和轉速信息,為閉環控制提供精準數據。由于電機通過諧波減速器驅動負載時,電機和負載之間可能存在非線性位置誤差,因此部分高精度關節電機會在電機和負載端各安裝一個編碼器。
4. 電機驅動模塊
關節電機一般通過EtherCAT、CAN或RS485與主站通信。對于協作機器人等對實時性要求高的應用,通常采用EtherCAT總線并執行CIA402運動控制協議;而對于機器狗和人形機器人等對響應速度要求高的場景,則常采用MIT或廠家自定義的簡易通訊協議。
?驅動模塊,精準定位
ZLG致遠電子推出了兩款關節電機驅動模塊,專為高端運動控制設計,兼容性強、穩定性高,適用于工業和消費級場景,可輕松嵌入關節電機。

1.ZMTS-EB1200-JM(EtherCAT版)
適合高實時性、高位置精度的應用,如協作機器人。
寬壓動力:24V~48V輸入,7A輸出,直徑58mm,適配非穿孔電機。
雙編碼器:內置21位絕對值編碼器,可擴展SSI或正交編碼器。
實時通信:工業級EtherCAT總線,同步時間≤256μs。
協議兼容:支持CIA402標準協議(CSP/CSV/CST/PP/PV/HM模式)。
運動黑科技:雙環ADRC位置控制,結合“前饋+反饋”糾偏,顯著提升抗干擾能力和定位精度。
2.ZMTS-CB1200-JM(CAN版)適合響應速度快、位置精度要求不高的應用,如機器狗、人形機器人、攝影云臺等。
- 寬壓動力:12V~48V輸入,7A輸出,直徑58mm,適配非穿孔電機。
- 單編碼器:內置21位絕對值編碼器。
- 可靠通信:基于CAN總線,同步時間≤2ms,適應復雜電磁環境。
- 協議兼容:無縫適配MIT機器狗協議,支持運控/位置/速度/扭矩模式。
- 溫控黑科技:通過電流和電阻實時估算電機溫度,響應快、精度高,有效防止電機過熱。
- 兩款驅動模塊各具特色,滿足不同場景需求,助力機器人運動控制更高效、更智能。
?應用場景,解鎖智能未來
1. 工業協作臂 — 轉矩模式下的安全交互
ZMTS-EB1200-JM(EtherCAT版),在CIA402的轉矩模式(CST)下,驅動模塊實時感知外部阻力,遇碰撞時自動降低輸出力矩,保護人員與設備安全,適用于精密裝配、醫療輔助等場景。
2. 四足機器狗 — 速度模式下的動態適應
ZMTS-CB1200-JM(CAN版)在廢墟救援等復雜環境中表現出色。在運控模式下,機器狗能夠快速調整步頻,輕松跨越碎石、斜坡等地形。相比傳統的三環位置控制,其穩定性大幅提升,讓機器狗在復雜環境中行動自如。
3. 超穩云臺 — 平順且靈活
ZMTS-CB1200-JM(CAN版)在攝影穩拍器中也有出色表現。在運控模式下,它可以靈活配置響應速度和位置精度的關系,確保畫面始終保持穩定輸出。無論是在連續拍攝還是復雜運動場景中,都能讓畫面平滑流暢,滿足專業影視創作的需求。
?技術賦能,驅動無限想象
從工業生產線到家庭服務,從極限救援到影視創作,關節電機驅動板正在不斷突破“智能運動”的邊界。我們以算法創新為核心,以可靠性為基石,為開發者提供“開箱即用”的解決方案。無論是科研機構、機器人廠商,還是創客團隊,都能在這里找到最適合自己的動力驅動方案。
-
電機驅動
+關注
關注
60文章
1476瀏覽量
89616 -
智能機器人
+關注
關注
18文章
920瀏覽量
85939 -
機器人關節
+關注
關注
0文章
28瀏覽量
365
發布評論請先 登錄
春晚機器人跳舞背后:精密關節連接器的“絲滑”秘密

機器人關節電機灌封解決方案 | EP 1720柔性環氧膠

SiLM2026EN-DG DFN3×3封裝如何實現200V半橋驅動,為機器人關節電機注入高效動力?
基于兆易創新GD32H75EYMJ7 MCU的機器人GaN關節驅動解決方案

扭矩之源:解析關節電機線圈如何實現機器人的柔順運動
半橋驅動SiLM2026EN-DG DFN3x3小封裝,輕松搞定200V機器人關節電機
采用DFN3×3封裝SiLM2026EN-DG 200V半橋驅動器,如何實現機器人關節的高效緊湊驅動?
繩子驅動的機器人,會是未來嗎?

為機器人關節驅動頭疼?SiLM2026EN-DG讓200V高壓與DFN3x3小封裝兼得!

集成多摩川磁性編碼器的伺服電機與機器人關節設計創新

集成MT6701磁編芯片的機器人關節模塊化設計與驅動優化

激光干涉儀:解鎖協作機器人DD馬達的精度密碼




 工商網監
工商網監
評論