 【一分鐘教程】用ZMC600E實現關節機器人±180度精準轉動
【一分鐘教程】用ZMC600E實現關節機器人±180度精準轉動

一分鐘速覽:從設備連接到編程控制,演示關節機器人的±180度精準轉動。
 ?關節機器人±180度轉動例程
?關節機器人±180度轉動例程
在科技高度發達今天,越來越多的智能機器人進入我們的日常生活中。究竟這些機器人是如何實現運動?工程師又是如何精準而實時的控制它們的“手腳”,從而完成各種高難度動作的?今天我們就用ZLG致遠電子的ZMC600E做一個控制機器人運動的例程,實現一個關節機器人±180度的來回轉動。

1. 連接設備
通過ZMC600E專用的主站通信口,使用以太網連接從站設備,其他普通網口接入用戶電腦。這樣,通信設備就連接完成了。

2. 配置通信設備
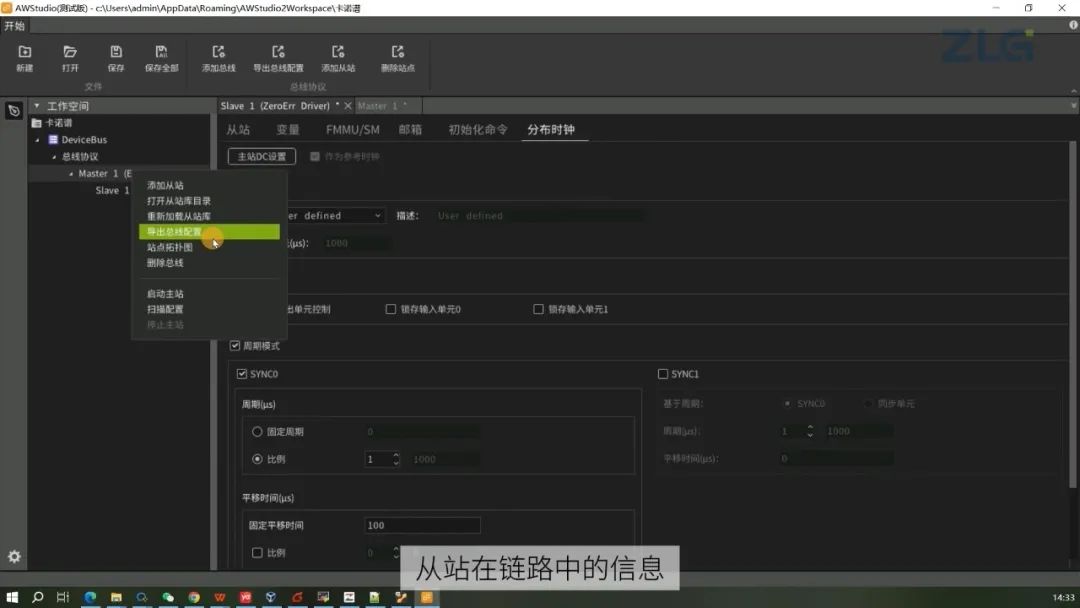
為了讓主站識別從站在鏈路中的信息以及傳輸數據內容,我們需要進行以下配置:
設備識別:通過掃描或手動配置,確保主站能夠識別所有從站設備。
DC時鐘同步:設置DC時鐘同步,通常選擇第一個從站設備作為時鐘源。
通信周期:設置通信周期,最小可以設置到500微秒,確保數據傳輸的實時性。
數據映射:配置數據映射,確保主站能夠正確讀取和寫入從站的數據,例如目標位置和實際位置。
到這里,機器人已經完成了初始化。
3. 編寫程序
為了讓機器人完成180度來回轉動,我們需要編寫一些程序來實現控制過程。這里我們使用C++進行編程。以下是一個簡單的示例代碼:
#include#include// 假設ZMC600E提供了相應的C++庫
intmain(){ // 初始化ZMC600E控制器 ZMC600E controller; controller.initialize();
// 設置目標位置 inttargetPosition =180;// 180度 controller.setTargetPosition(targetPosition);
// 啟動運動 controller.startMotion();
// 等待運動完成 while(!controller.isMotionComplete()) { // 可以在這里添加一些狀態檢查或日志輸出 }
// 停止運動 controller.stopMotion();
std::cout < return0;}
4. 編譯與執行
最后一步是編譯程序,讓機器人讀懂我們的指令并執行。從效果來看,關節機器人完美地完成了±180度的旋轉運動。
操作步驟中的細節
多個設備配置:通過掃描或手動配置,確保主站能夠識別所有從站設備。
DC時鐘同步:設置DC時鐘同步,通常選擇第一個從站設備作為時鐘源。
通信周期:設置通信周期,最小可以設置到250微秒,確保數據傳輸的實時性。
多軸同步運動:實現更復雜的多軸同步運動,可以調用我們提供的運動學算法庫。
如果您對ZMC600E的性能或這個應用有任何想法,歡迎在評論區留言探討。
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
以太網
+關注
關注
41文章
5997瀏覽量
180796 -
智能機器人
+關注
關注
17文章
920瀏覽量
85776
發布評論請先 登錄
[貼圖]一分鐘的時間你的身邊都會出現什么變化?
一個按鍵板一分鐘不操作的話led燈就會變暗

【新品發布】ZMC600E EtherCAT主站控制器全新上市


ZMC600E運動控制器T型、S型速度規劃詳解

ZMC600E運動控制器直線和圓弧插補算法詳解
ZMC600E,多核異構如何成就機器人精準控制?



 工商網監
工商網監
評論