 恩智浦自主移動機器人設計要點
恩智浦自主移動機器人設計要點

長期以來,自動化機器人一直被視為科幻小說中的概念,而如今這一技術已成為現實,并正在大規模部署。在機器人技術領域,自主移動機器人 (AMR) 是發展最快的創新技術之一。
自主移動機器人是一種具備自主導航能力的機器人系統,能夠在倉庫物流等環境中自動運行,無需人為 干預。相比之下,傳統的自動導引車 (AGV) 依賴信標或軌道沿預設路線行駛,而自主移動機器人則完全依靠車載傳感器、實時數據處理和人工智能技術來感知周圍環境并自主決策。這種高度自主使其能夠靈活適應環境,繞開突發障礙,并動態調整任務的優先級。
自主移動機器人的行為所依賴的計算架構自該技術誕生以來已發生顯著演進。早期的系統采用集中式處理模式,由高性能處理器統一收集并解析所有傳感器數據,并據此作出運動、建圖及控制等決策。盡管這種模式在當時較為有效,但隨著傳感器數量和復雜性的增長,集中式架構逐漸暴露出延遲高、能效低的問題。在對實時響應、能源效率或車隊模塊化擴展有較高要求的應用中,這些局限尤為突出。
為了應對這些挑戰,現代自主移動機器人越來越多地采用分布式架構。在這種架構中,邊緣處理器被嵌入至視覺系統、運動控制器及其他子系統中,承擔本地計算任務。這種方法顯著降低了中央處理器的負載,有助于實現更低功耗的設計,同時提高實時決策速度。
本文節選自恩智浦《自主移動機器人設計要點》技術白皮書。該白皮書概述了自主移動機器人子系統的關鍵設計考量, 并探討了恩智浦的可擴展處理器產品組合及軟件生態系統如何支持各項功能。
自主移動機器人的核心任務是在動態環境中實現自主導航,而這一能力依賴于一套復雜的互聯硬件系統。從整體架構來看,自主移動機器人的硬件可分為以下幾個關鍵子系統:
傳感器和感知
計算和導航
電機控制和執行
傳感器和感知
傳感器決定著自主移動機器人感知周圍環境的方式。為了實現自主操作,機器人必須能夠檢測并分類物體、測算距離、理解運動狀態并在地圖上完成精準定位。這種感知能力依賴多種傳感技術的組合,每種技術各具優勢。設計人員面臨的核心挑戰在于選擇合適的傳感器,并將傳感器的輸出融合為一個連貫的模型,支持機器人制定實時、準確的決策。
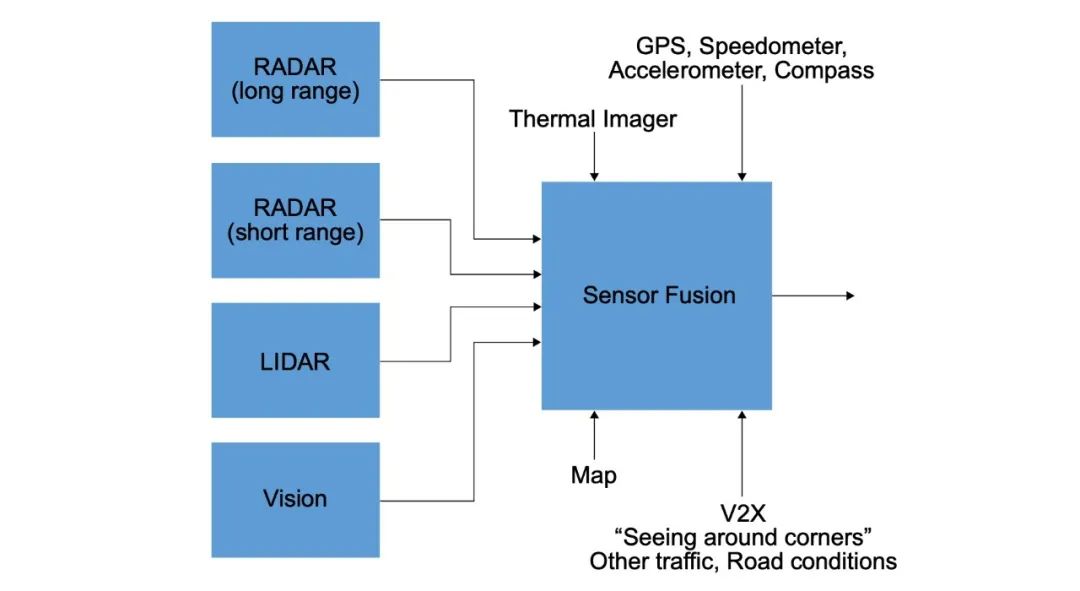
圖1:ADAS系統中使用的不同傳感器
單一傳感器雖具應用價值,但自主移動機器人只有在融合多種傳感器數據后,才能真正發揮其強大能力。在此過程中,來自攝像頭、激光雷達和IMU的原始數據需要進行濾波、同步和處理,形成統一的感知層。
邊緣人工智能在這一過程中至關重要。通過在傳感器子系統內部執行物體檢測和深度估計等預處理任務,邊緣AI可以減少數據量并降低通信延遲。這種分布式方法可以提升系統響應速度,支持使用低功耗中央處理器,從而降低成本并提高效率。
恩智浦通過其應用處理器產品系列滿足邊緣智能需求。i.MX 8M Plus集成了神經處理單元 (NPU),可以直接對圖像數據進行實時AI推理。它專注于自動化領域的機器學習與視覺應用,滿足智能家居、樓宇、城市及工業4.0等場景的需求。
i.MX 95系列為汽車邊緣計算、商用物聯網和工業平臺提供安全、可靠、高能效的邊緣計算解決方案。它融合了強大的AI加速視覺處理、功能安全、高級數據安全防護及高性能連接。
對于成本敏感型應用,i.MX 93提供高效的機器學習 (ML) 加速和高級安全性,支持高能效的邊緣計算。
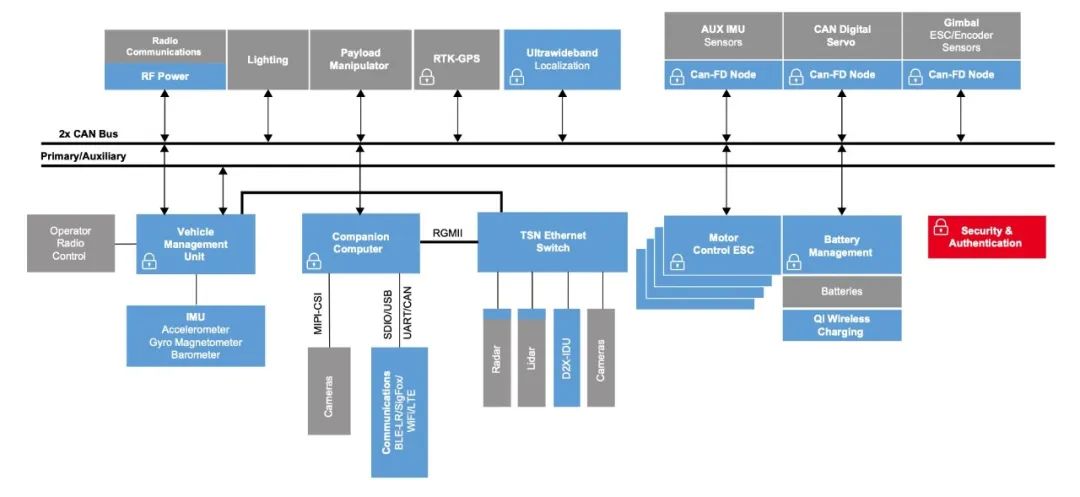
圖2:模塊化移動機器人架構框圖
計算與導航
自主移動機器人的導航能力依賴于建圖、運動規劃和決策等實時工作負載。這些功能使機器人能夠理解周圍環境并動態響應環境的變化。
該過程的核心是同步定位與建圖 (SLAM)。在通過SLAM完成定位與環境建模后,機器人需要規劃移動路徑。路徑規劃和障礙物規避算法會實時分析該地圖,計算最優路線,同時兼顧靜態和動態障礙物。在現代自主移動機器人中,基于AI的決策通過學習歷史交互數據來優化導航,動態調整機器人的行進路線,而不再依賴硬編碼規則。
傳統上,這些工作負載使用集中式計算模型,由單一高性能處理器處理所有視覺、建圖和導航任務。然而,這種模型會大幅增加功耗和系統復雜性,在配備多傳感器陣列的平臺中尤其如此。相比之下,現代自主移動機器人正逐步轉向分布式計算架構,各個傳感器節點執行本地處理,然后將處理后的數據傳輸至性能適中的中央處理器。這種架構使工程師可以開發模塊化、可擴展的機器人設計,在滿足應用需求的同時避免過度配置計算資源。
恩智浦提供多種處理器選項來支持這一架構演進。i.MX 95六核處理器結合高級AI能力、多核處理、高級信息安全和功能安全特性,適用于高性能導航和傳感器融合。i.MX 8M Plus支持基于視覺的導航和輕量級SLAM的實時邊緣推理。S32G和S32N汽車處理器系列提供多核計算,符合及ASIL-D級安全等級要求。
對于確定性控制回路和低延遲運動執行,i.MX RT跨界MCU集成控制與連接功能,能夠實現實時響應。對于需要ASIL-D級汽車安全能力的應用,S32K系列提供可擴展的MCU產品組合。
電池管理
與大多數移動應用類似,能源管理是自主移動機器人設計的核心問題。電池容量會直接限制運行時間,進而影響任務調度、吞吐量和工作效率。因此,自主移動機器人充電間隔越長,實用價值越高。電池性能還會影響總體擁有成本,包括所需的充電站數量和電池更換頻率。
為了最大限度地延長運行時間,自主移動機器人必須配備先進的電池管理系統 (BMS),以實時監控、保護和優化電力使用。其目標是在不犧牲安全性或電池壽命的前提下維持峰值性能。最終,設計良好的電池管理系統既能保證高功率子系統能獲得充足的能源,又能在低需求時段最大限度減少不必要的功耗。
恩智浦的MCX微控制器產品組合專為超低功耗運行設計。憑借緊湊的封裝和集成模擬外設,它們能提供實時響應能力,跟蹤電池參數并在系統層面執行節能策略。
恩智浦還提供電池管理參考設計,集成了保護電路、通信接口以及用于充電狀態估算和健康診斷的嵌入式算法。借助這些基礎模塊,開發者可以縮短設計周期,同時開發符合法規和性能標準的電源系統。
電機控制與驅動
自主移動機器人的移動能力依賴于精準可靠的電機控制。無論是在狹窄的倉庫過道內移動,還是在輸送帶下對位裝載,精確的驅動對于自主移動機器人實現高精度自主運行至關重要。
然而,有效的電機控制不僅需要基本的驅動能力,實時響應能力也至關重要。電機控制系統必須在毫秒內完成速度、方向及制動的快速調整。上述控制過程要求具備需要確定性的響應時間和低控制延遲,在多個電機協調運行時尤其如此。
為確保運動的平穩性與精度,自主移動機器人采用閉環控制系統,通過旋轉編碼器、輪速計和慣性測量單元 (IMU) 的持續反饋來監控速度和位置。借助傳感器反饋,控制算法對實際性能與指令軌跡進行對比,并實時進行調整,修正偏差。
恩智浦為各類自主移動機器人平臺提供可擴展的電機控制解決方案。例如,i.MX RT1180跨界MCU專為高端電機協調而設計,原生支持EtherCAT協議。對于大多數自主移動機器人,恩智浦MCX系列提供了高效、高性價比的解決方案。這些微控制器可按電機或按軸部署,構建模塊化架構,輕松擴展,適應系統復雜度的增加。
軟件支持與生態系統
雖然硬件對自主移動機器人至關重要,但軟件架構同樣不可或缺。從運動規劃到環境感知與控制,軟件決定著機器人與周圍環境的交互效果。為了應對這種復雜性,開發者需要模塊化的開源平臺,簡化開發流程并確保硬件子系統間的兼容性。
因此,ROS 2 (機器人操作系統2) 已成為自主移動機器人開發的實際中間件標準。具體而言,ROS 2提供了一個靈活的框架,支持消息傳遞、實時控制和硬件抽象。
對于視覺和人工智能工作負載,自主移動機器人依賴穩健的 計算機視覺和機器學習技術體系。其中,OpenCV等工具可用于實現目標檢測和圖像分割等功能。同時,TensorFlow Lite或ONNX人工智能框架用于運行SLAM、障礙物識別和運動預測的推理模型。
為簡化軟件集成并加速部署,恩智浦提供一系列參考設計。例如,NavQPlus平臺為視覺和人工智能應用提供集成計算解決方案,支持攝像頭輸入、人工智能推理和ROS 2兼容性。
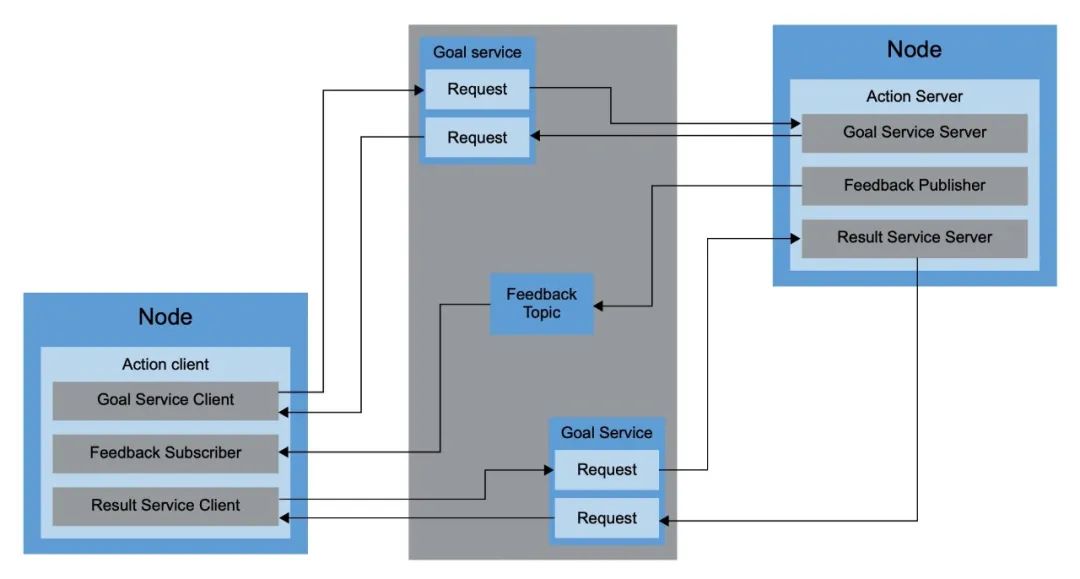
圖3:動作 (Action) 是ROS 2中的一種通信類型,專為長時間任務設計,其中包含三個部分:目標、反饋和結果。
本文小結
設計高效的自主移動機器人,需要在感知、計算、電源和運動子系統之間實現有效協同。
恩智浦半導體提供豐富的處理器和微控制器產品組合,可精準滿足上述需求。從支持人工智能視覺處理的i.MX 8M Plus和i.MX 95,到量產級參考設計、軟件支持工具及兼容ROS 2的開發平臺,恩智浦為構建高性能的專用機器人平臺提供全方位資源。
深入了解各類解決方案并加速自主移動機器人項目開發進程,請訪問恩智浦移動機器人專題頁面,獲取技術文檔、參考設計和開發者資源,點擊訪問>>
-
傳感器
+關注
關注
2577文章
55360瀏覽量
793337 -
處理器
+關注
關注
68文章
20312瀏覽量
254275 -
恩智浦
+關注
關注
14文章
6115瀏覽量
152293 -
自主移動機器人
+關注
關注
2文章
49瀏覽量
12278
原文標題:自主移動機器人設計要點和解決方案,一文講透!
文章出處:【微信號:NXP客棧,微信公眾號:NXP客棧】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄




 工商網監
工商網監
評論