 電子發(fā)燒友App
電子發(fā)燒友App



經(jīng)常聽到有人問“3D視覺傳感器/3D激光視覺傳感器的精度是指什么?跟重復精度有什么區(qū)別?”“3D視覺傳感器/3D激光視覺傳感器線性度的定義?”等,今天小編帶大家一次性搞懂這幾個定義!
X?分辨率?=?視野寬度?/點數(shù)
點與點之間沿著激光線方向的水平間距
取決于3D視覺傳感器沿著視野方向上對應的imager的像素個數(shù)
對寬度精度很重要
Z?向線性度
以被測輸入量處于穩(wěn)定狀態(tài)為前提。在規(guī)定條件下,3D視覺傳感器校準曲線與擬合直線間的最大偏差(ΔZmax)與滿量程輸出(Z,景深)的百分比,稱為線性度。
δ=ΔZmax/?Z*100%
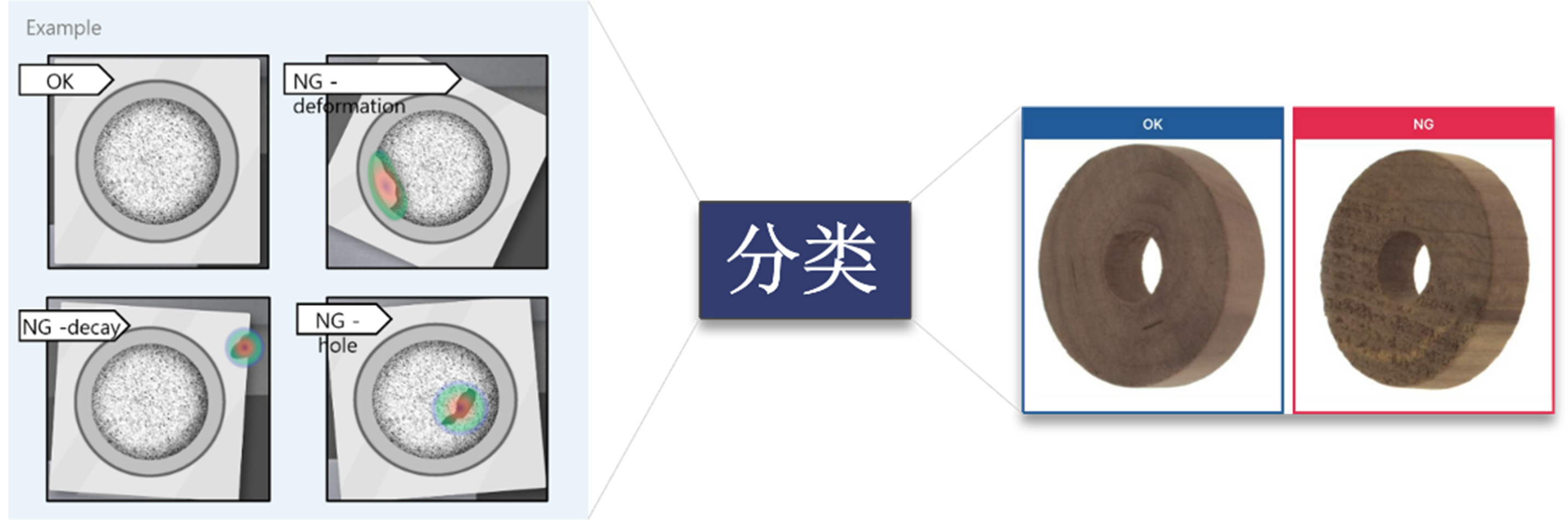
Z?分辨率和重復性
分辨率:是指3D視覺傳感器可感受到的被測量值的最小變化的能力
穩(wěn)定的測量環(huán)境
標準量塊
多次重復測量
重復性?
整個視野量程范圍內(nèi),測同一物體,多次測量值的變動大小
另一種說法叫重復精度,注意區(qū)別于精度!重復性的目的只是要獲知設(shè)備的變異性。
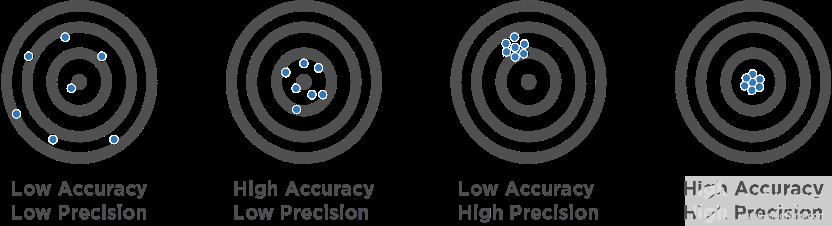
精度Precision
儀器的值與理論值之間的最大差值,由3D激光視覺傳感器的基本誤差極限和影響量(如溫度變化、濕度變化、電源波動、頻率改變等)引起的改變量極限確定。精確度,準確(性);數(shù)據(jù)穩(wěn)定性
線性度Linearity
是描述3D視覺傳感器靜態(tài)特性的一個重要指標,以被測輸入量處于穩(wěn)定狀態(tài)為前提。在規(guī)定條件下,3D視覺傳感器校準曲線與擬合直線間的最大偏差(ΔYmax)與滿量程輸出(Y)的百分比,稱為線性度(線性度又稱為“非線性誤差”),該值越小,表明線性特性越好。以上說到了“擬合直線”的概念,擬合直線是一條通過一定方法繪制出來的直線,求擬合直線的方法有:端基法、最小二乘法等等。
GRR?和相關(guān)性
GRR指“測量系統(tǒng)的重復性和復現(xiàn)性”,英文是Gauge?Repeatability?and?Reproducibility,反映系統(tǒng)在短期的重復性和長期的穩(wěn)定性。為計算重復性(Repeatability),在其取得數(shù)據(jù)時應符合
?◆同一人員????????????????◆相同的歸零條件
?◆同一產(chǎn)品????????????????◆同一位置
?◆同樣的環(huán)境條件 ????◆數(shù)據(jù)要在短時間內(nèi)取得
再現(xiàn)性(Reproducibility)則希望獲知不同條件下的變異,因此取得數(shù)據(jù)時應符合:
?◆不同的人員? ?????????◆相同的歸零條件
?◆?相同的位置? ????????◆相同的環(huán)境
?◆數(shù)據(jù)宜在較長期間內(nèi)取得
相關(guān)性:兩個或多個變量之間的線性關(guān)聯(lián)程度。一般用相關(guān)系數(shù)來衡量。
準確性與精度圖示
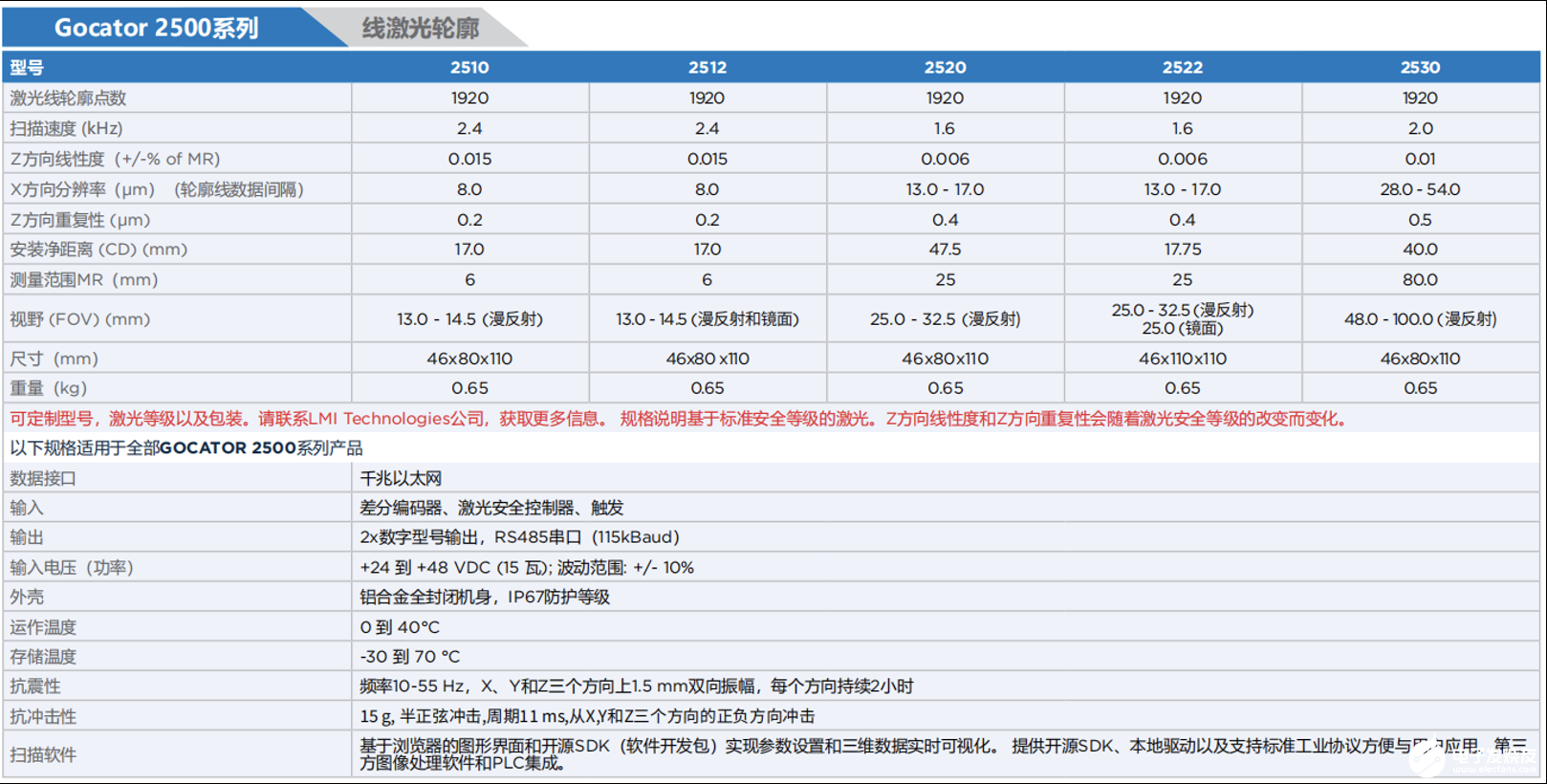
這是3D視覺傳感器Gocator2500系列的參數(shù)表,大家可以對照看看
關(guān)于我們:
上海美城智能科技有限公司為行業(yè)提供領(lǐng)先的成像和視覺系統(tǒng)解決方案,高品質(zhì)的成像和視覺產(chǎn)品,以及專業(yè)化一體化的服務。公司致力于3D成像應用場景化研發(fā),推動行業(yè)的3D應用發(fā)展,深度覆蓋工業(yè)、國防、科研、交通、3D交互和生命科學等行業(yè)。豐富的全球化合作資源和自主研發(fā)技術(shù)相結(jié)合,為客戶打造優(yōu)質(zhì)的產(chǎn)品和方案
審核編輯:符乾江





































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論