") 從3D傳感器到立體相機,解鎖工業(yè)應用新可能
從3D傳感器到立體相機,解鎖工業(yè)應用新可能

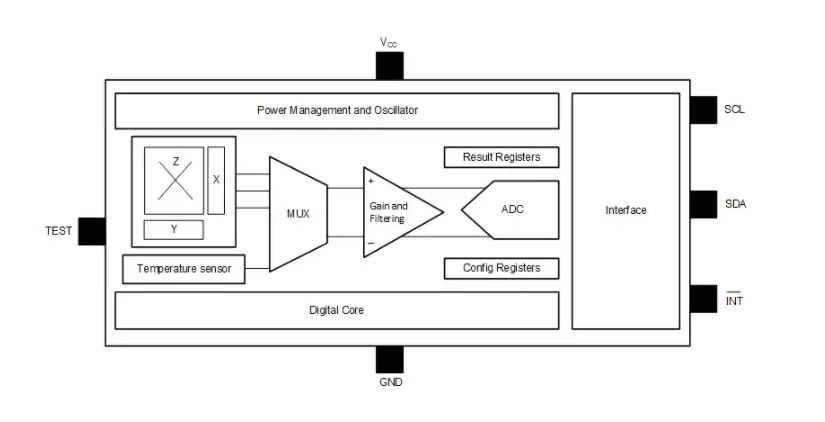
3D傳感器是實現(xiàn)深度感知的核心技術。這些傳感器廣泛應用于多種常見的3D視覺技術中,例如立體相機、激光雷達(LiDAR)、飛行時間(ToF)相機和激光三角測量。
通常根據(jù)應用場景和技術要求選擇合適的3D視覺方案,不同技術各有其優(yōu)勢。例如,激光雷達和激光三角測量技術,由于內(nèi)置諸如旋轉(zhuǎn)鏡等運動部件,因此不適合在惡劣環(huán)境中使用。
立體相機更適合戶外應用場景,原因在于立體相機不易受到陽光直射的干擾。例如,相較于其他3D傳感器,立體相機在成本方面更具優(yōu)勢。立體相機在計算圖像中的3D數(shù)據(jù)時,相較于上述其他技術,需要更高的計算能力。同時,部分立體相機具備板載處理能力,可減輕主機的數(shù)據(jù)處理負擔。此外,立體相機還可提供彩色圖像和彩色點云,而其他主流3D視覺技術則通常需另配彩色相機。

不同3D視覺技術在測量范圍與精度之間往往需要權衡。
對于任何類型的視覺傳感器而言,測量范圍與精度之間通常存在權衡關系。例如,遠程傳感器的精度相對較低,而短距離傳感器則具有較高的精度。在測距能力方面,激光雷達具備最遠的測距能力,其次是立體相機,最后是渡越時間傳感器。激光三角測量的覆蓋范圍雖然最短,但其精度卻更高。
遠距離性能對于實現(xiàn)自主導航與障礙物規(guī)避至關重要,而中距離性能則更適用于拾取-放置操作。近距離范圍探測主要則用于物體的識別與檢查。
立體工業(yè)相機的應用
立體相機因其在測量范圍與精度方面的靈活性,廣泛適用于大多數(shù)倉儲機器人應用場景。這類相機具備較高的性價比,結(jié)構堅固耐用,同時可輸出用于目標識別的彩色圖像。
在工業(yè)領域中,立體相機主要應用于兩類機器人系統(tǒng):自主移動機器人(AMR)和取放機器人。
AMR系統(tǒng)通過立體相機執(zhí)行SLAM(同步定位與建圖),一方面構建環(huán)境地圖,另一方面實現(xiàn)自身在地圖中的定位。AMR能夠規(guī)劃前往指定目的地的路線,同時精準檢測障礙物(包括物體/行人),并靈活地在這些障礙物周圍導航。
標準立體相機在AMR應用中的特征/要求如下:
高幀率
低延遲
堅固可靠
校準保留
寬視野
遠距離工作能力
高動態(tài)范圍,以適應室內(nèi)外不同光照條件

立體相機
在取放機器人中
的應用實例
取放機器人系統(tǒng)應用的關鍵組件包括:感知環(huán)境的視覺系統(tǒng)、用于數(shù)據(jù)處理和決策的控制系統(tǒng),以及具備抓取或吸附功能的機械臂。此類取放機器人廣泛應用于裝配、碼垛、拆垛及料箱分揀等多種工業(yè)任務。
以料箱分揀為例,其目標是從容器中移除隨機放置的物體。在這些應用中,視覺系統(tǒng)用于識別和定位目標物體,隨后計算其方位,確保抓手能夠精準抓取。然后,控制系統(tǒng)規(guī)劃出機器人的移動路徑,有效避開途中的障礙物。最后,機器人順利拾起物體,并將其放置于指定位置。
標準立體相機在該類取放機器人應用中的特征/要求如下:
低延遲
堅固可靠
校準保留
能夠在多塵/高濕度等工業(yè)環(huán)境中運行
針對不同大小的物體,需要在視野和工作距離上具備靈活性
Bumblebee X立體相機
Teledyne FLIR IIS的Bumblebee X立體相機,該產(chǎn)品配備工業(yè)級(IP67防護等級)、5千兆以太網(wǎng)接口,并集成板載處理能力的立體視覺系統(tǒng)。

Bumblebee X立體相機的主要特點:
高分辨率與高精度
搭載立體圖像處理算法,實現(xiàn)板載處理
24 厘米基線的遠距離工作
靈活的視野選項(60、80 和 105 度)
長時間的校準保留
兼容外部圖案投影儀
支持Robot OS和GenICam接口
-
傳感器
+關注
關注
2577文章
55280瀏覽量
792908 -
3D
+關注
關注
9文章
3016瀏覽量
115375 -
立體相機
+關注
關注
0文章
7瀏覽量
4083
發(fā)布評論請先 登錄
精準捕捉扭矩,解鎖工業(yè)無限可能——德國NCTE AG扭矩傳感器

深度解析TMAG5170D-Q1:高精度3D線性霍爾效應傳感器的卓越之選
HAL/HAR 3900:3D 位置傳感器的佼佼者
工業(yè)3D相機常見參數(shù)及分類的通用術語解讀

探索TLE493D-P3XX-MS2GO 3D 2Go套件:開啟3D磁傳感器評估之旅
TMAG5273線性3D霍爾效應傳感器的技術解析與應用
TMAG5170D-Q1 3D線性霍爾效應傳感器技術解析與應用指南
iTOF技術,多樣化的3D視覺應用
3D傳感器技術助力工業(yè)變革,解鎖制造與物流新可能

3D視覺傳感器如何變革工業(yè)領域
3D 工業(yè)相機避坑指南:從選型到落地,這幾個坑別踩!

3D工業(yè)相機價格是?這種3D工業(yè)相機性價比最高

英飛凌發(fā)布第三代3D霍爾傳感器TLE493D-x3系列





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論