 電子發燒友App
電子發燒友App



2021年8月19日,全球智能汽車領域的頂尖賽事——2021i-VISTA自動駕駛汽車挑戰賽,在重慶正式開啟。首日的賽程是被譽為賽事“人氣王”的ADAS輔助駕駛系統挑戰賽,其中的APS自動泊車挑戰賽更是整個賽事的重頭戲。本次APS自動泊車挑戰賽設置了平行車位、垂直車位、斜向車位三種場景,這些都是駕駛者平時最常遇到的泊車場景。登場的多個品牌車型基本都出現失誤,有的在側方位停車時越過后方停車線,有的在垂直停車時沒能準確識別車位。長安UNI-T2021款1.5T旗艦型從識別車位、執行操作,到完成泊車,三種場景都是一把入庫,勇奪冠軍。江淮汽車緊跟其后位列第二。
恰巧的是獲得金銀牌的兩輛車型均搭配的是縱目科技的自動泊車產品。下面就由縱目科技的技術專家來詳細的介紹,基于超聲波和環視深度融合的縱目泊車環境感知系統。
APA系統經過幾代的發展已經從最初的簡單的超聲系統到現在結合視覺對車位的檢測,甚至有在開發的系統能夠使用毫米波乃至激光傳感器來識別車位和車位內的障礙物,當然這類系統還面臨成本相對超聲波和視覺系統較高而沒法商品化的問題。
現在市場上常見的APA系統依舊是獨立的超聲系統或則獨立的視覺系統,以及兩者相結合的系統。而縱目在這次iVista測試中第一次推出了量產化的APA系統,深度結合了超聲和視覺感知。
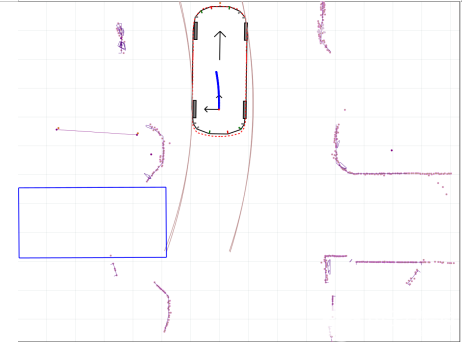
在APA場景中,首要考慮的是對環境的感知,也就是障礙物的位置和車位的位置,以下是縱目在APA開發中對iVista場景之一的檢測結果。這個結果清晰顯示出車位的位置,以及周圍障礙物的位置,同時感知系統提供的障礙物的屬性信息,也被用車位的構建和剔除。最終的結果有兩個車位可以被用于泊入。系統最后選擇的是距離最近的車位。
感知結果:
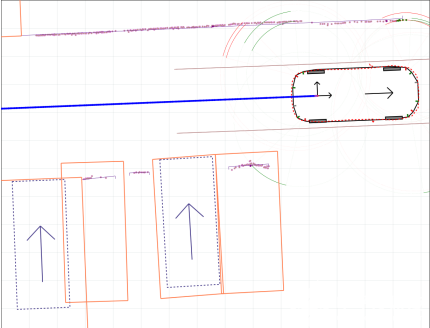
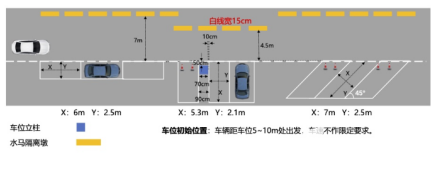
實際的擺設場景為中間垂直車位:
由于系統清晰知道障礙物的位置,車位類型和泊車最終的位置,這樣就可以從一開始規劃出一個優化的泊入路徑,減少整個泊車時間。
其次,在泊入的時候,為了減少行車機械結構帶來的累計誤差,縱目開發對車位和障礙物的閉環檢測功能,也就是在泊入車位的時候,始終對周圍環境做檢測,修正檢測的結果,保證能夠動態調整泊入路徑。
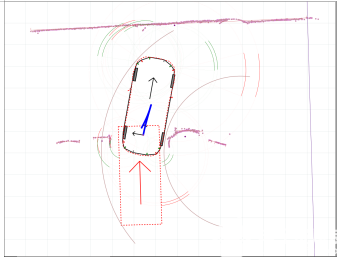
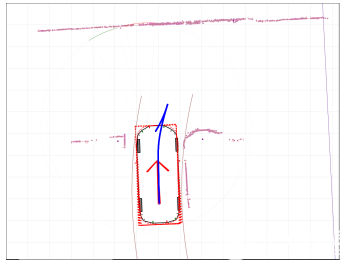
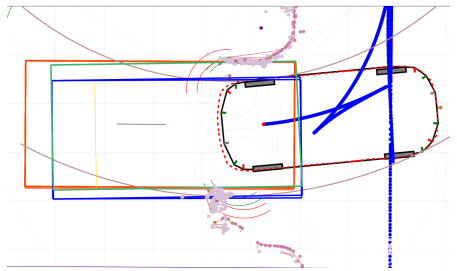
在APA系統中,車輛的定位,環境感知和規劃控制始終是保證系統性能的三大基石。iVista-2021的比賽結果是對縱目當前一代APA系統最直接的評價,而在開發中的下一代APA系統中的環境感知,利用視覺提供新的檢測信息結合超聲波檢測有針對性地提高對障礙物的輪廓和類型的感知能力,例如錐桶,擋輪器,方柱,車輛等等,這樣更加有利于規劃出合理的更接近人類行為的泊車路徑。以下兩圖是改進后的檢測能力。
?
縱目科技的泊車產品目前處于領先地位,希望縱目科技未來能持續為人們帶來更優秀的產品,發展好泊車產品,更好的服務社會。
fqj
















































 工商網監
工商網監
評論