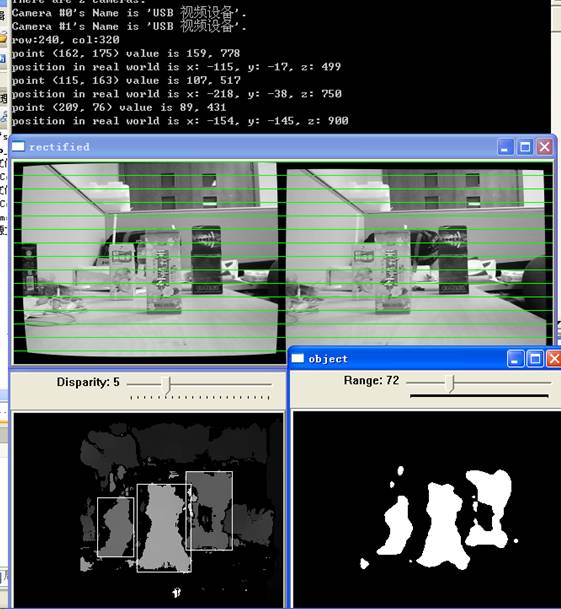
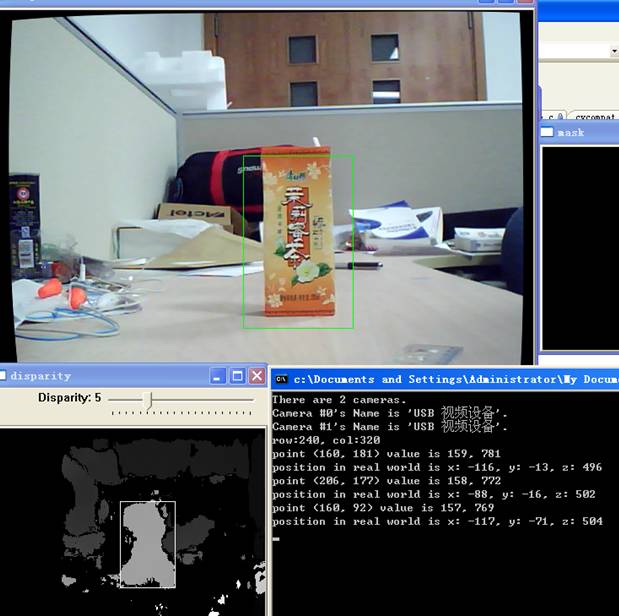
上圖中的人和椰子樹,人在前,椰子樹在后,最下方是雙目相機中的成像。其中,右側相機成像中人在樹的左側,左側相機成像中人在樹的右側,這是因為雙目的角度不一樣。
2022-09-26 09:37:44 12198
12198 LSD-SLAM 即 Large-Scale Direct SLAM,兼容單目相機和雙目相機。LSD-SLAM是一種基于光流跟蹤的直接法SLAM,但是實現了半稠密建圖,建圖規模大,可以在線實時運行。
2024-02-26 09:41:5016468 
車身周圍一般有4路魚眼相機:前、后、左、右共四個。用來拍攝車周圍的畫面。如下圖所示為車右邊的魚眼相機拍攝的畫面。魚眼相機拍攝的圖一般不用來做車位檢測,但可以用來后續做障礙物檢測。
2022-11-23 11:32:041748 雙目測寬儀是基于機器視覺原理及模擬人的雙眼進行寬度尺寸自動測量的儀器,是一種高度自動化的工業實時在線寬度檢測儀表。
雙目測寬儀是一種智能化的全自動工業在線實時寬度檢測設備,兩個工業相機就像人的雙眼
2023-12-04 17:10:35
實用化,不僅將成為工業檢測、生物醫學、虛擬現實等領域的關鍵技術,還有可能應用于航天遙測、軍事偵察等領域。目前在國外,雙目體視技術已廣泛應用于生產、生 活中。雙目立體視覺是計算機視覺的一個重要分支,單從
2013-11-21 16:20:51
將成為工業檢測、生物醫學、虛擬現實等領域的關鍵技術,還有可能應用于航天遙測、軍事偵察等領域。目前在國外,雙目體視技術已廣泛應用于生產、生 活中。雙目立體視覺是計算機視覺的一個重要分支,單從雙目
2013-11-21 16:22:03
雙目立體視覺(BinocularStereoVision)是機器視覺的一種重要形式,因其可簡單地利用左右攝像機中的圖像信息計算得到相機視野中物體相對于攝像機的深度信息使得該技術擁有廣泛的應用前景
2021-12-23 07:19:52
` 本帖最后由 ketianjian 于 2016-3-3 09:38 編輯
雙目立體視覺,這是一門有著廣闊前景運用的學科,也是一種非常重要的機器視覺運用形式。通俗來講,就是利用兩臺或者多臺
2016-03-03 09:36:59
相機包帶加厚肩帶 攝影包相機包電腦包減壓彈力單肩帶 背帶金屬扣
2023-03-28 13:03:52
解析深度學習:卷積神經網絡原理與視覺實踐
2020-06-14 22:21:12
AUTOSAR架構深度解析本文轉載于:AUTOSAR架構深度解析AUTOSAR的分層式設計,用于支持完整的軟件和硬件模塊的獨立性(Independence),中間RTE(Runtime Environment)作為虛擬功能...
2021-07-28 07:02:13
AUTOSAR架構深度解析本文轉載于:AUTOSAR架構深度解析目錄AUTOSAR架構深度解析AUTOSAR分層結構及應用軟件層功能應用軟件層虛擬功能總線VFB及運行環境RTE基礎軟件層(BSW)層
2021-07-28 07:40:15
C語言深度解析,本資料來源于網絡,對C語言的學習有很大的幫助,有著較為深刻的解析,可能會對讀者有一定的幫助。
2023-09-28 07:00:01
I2C通信設計深度解析
2012-08-12 21:31:58
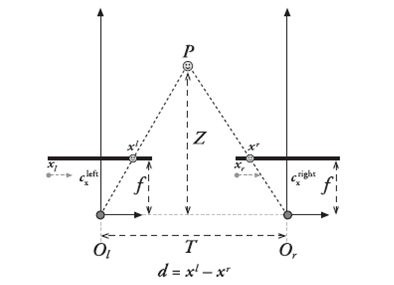
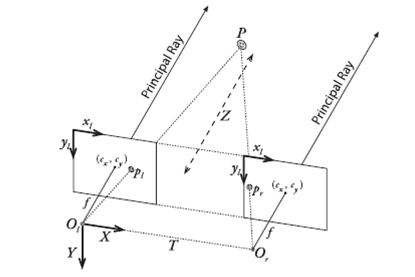
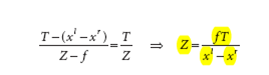
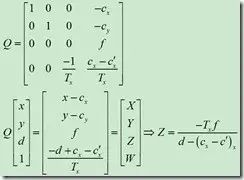
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw雙目立體視覺系統使用兩只相機同步采集圖像,通過像素匹配獲得深度圖像,進而獲取三維點云,系統結構如下。用下圖來解釋雙目視覺的基本原理:圖中所示變量為
2020-03-02 17:03:12
挑戰,包括激光雷達、單目測距和雙目視覺技術等。在當前的高級輔助駕駛技術(ADAS)中,雙目視覺技術在距離檢測方面表現出色,它可以精確地測量物體的距離,提供更客觀的數據。
為了應對這一需求,設計了一
2023-12-19 18:02:07
電腦接了個CREVIS的USB相機,在計算機的圖像設備里能檢測到,驅動也裝好了,但是NIMAX的設備和接口里只有電腦自帶的攝像頭,缺測不到外接的相機。這是什么問題?
2017-06-08 22:57:30
深度相機根據其工作原理可以分為哪幾種?其有哪些區別?
2021-07-01 10:03:56
本帖最后由 eehome 于 2013-1-5 10:06 編輯
Zstack中串口操作的深度解析(一)歡迎研究ZigBee的朋友和我交流。。。
2012-08-12 21:11:29
免費視頻教程:java經典面試題深度解析對于很多初學者來說,學好java在后期面試的階段都沒什么經驗,為了讓大家更好的了解面試相關知識,今天在這里給大家分享了一個java經典面試題深度解析的免費視頻
2017-06-20 15:16:08
`labview在檢測PCBA插件的錯、漏、反等缺陷中的應用檢測原理通過高精度彩色工業相機不停板實時抓取板卡圖像,采取卷積神經網絡算法處理圖像,智能判定元器件不良。采用最新的深度學習算法對電容,光耦,二極管等訓練模型,能兼容不同pcb板,不同環境。`
2021-07-13 15:27:47
攝像頭,另外兩種比較結構復雜。我目前在做的就是雙目攝像頭的景深相機方案,直接可以生成面陣的景深圖,旋轉一周也就可以生成3D的景深圖。但是這類的景深相機也有自己的缺陷,那就是算法復雜,在計算量巨大,我
2017-11-12 21:37:42
內核, 主頻可達1GHz, 可大大提高視覺處理的效率項目描述:該項目是五子棋機器人研發的一部分, 通過雙目攝像頭檢測出五子棋的位置, 測算出其全場坐標, 然后移動過去抓取棋子
2015-08-09 07:48:55
是左右相機拍攝同一塊圓形標定板的圖像,并根據labview自帶的圓點標定板圓點檢測函數得到圓點坐標。下圖是加載圓點標定板標定結果后,加載一對圖像后,鼠標移動到左圖上顯示的距離信息。程序框圖分3部分
2021-09-27 16:52:18
光耦PC817中文解析
2012-08-20 14:32:28
AUTOSAR架構深度解析本文轉載于:AUTOSAR架構深度解析AUTOSAR的分層式設計,用于支持完整的軟件和硬件模塊的獨立性(Independence),中間RTE(Runtime
2021-07-23 08:34:18
異常檢測的深度學習研究綜述原文:arXiv:1901.03407摘要異常檢測是一個重要的問題,在不同的研究領域和應用領域都得到了很好的研究。本文的研究目的有兩個:首先,我們對基于深度學習的異常檢測
2021-07-12 07:10:19
平臺上實現雙目視覺ADAS提出了挑戰。基于S32V234的雙目視覺ADAS解決方案S32V234片上具有兩路MIPI-CSI2相機接口,每一路最大可提供6Gbps的傳輸速率,可用于左右兩路相機的視頻
2017-08-12 15:15:52
嗨,我買了一臺D435相機。我想要校準D435相機與其他設備的相對位置,所以我需要測量D435的RGB相機和深度相機之間的相對位置以便進一步完成工作。所以我想問這是否確實得到了一個確切的參數或方法
2018-11-27 14:16:59
相機就像人的雙眼,可以形成立體視覺,這樣就可以得到足夠的信息判斷被測物的距離,修正和消除距離變化對測量的影響。
雙目測寬儀是新研發的一種寬度檢測設備,采用立體機器視覺原理檢測,利用算法消除傾斜等
2023-11-20 17:25:38
雙目測寬儀是機器視覺原來制造而成的智能寬度檢測設備,廣泛應用于板材類產品的寬度檢測。通過測寬儀的使用,實時了解產品寬度品質,進行超差提示,減少廢品的生產。
雙目測寬儀優勢
測量軟件界面顯示:產品規格
2023-11-28 17:13:06
頂頭狀態。
檢測頂頭算法
引入人工智深度學習技術,通過Keras實現卷積神經網絡(CNN),用Numpy實現采集數據的訓練,得到符合現場需求的模型,進一步提升檢測的準確性和現場的適應性。
應用范圍
2025-12-22 14:33:50
在現代工業自動化生產過程中,計算機視覺正成為一種提高生產效率和檢驗產品質量的關鍵技術之一,典型應用如機器零件的自動檢測、智能機器人控制、生產線的自動監控等。在國防和航天等領域,計算機視覺也具有較重
2016-01-19 16:59:12
D130S型3D相機采用主動式深度感知技術,它采用激光光源和MEMS微振鏡模組作為投影模組,將可編碼的條形結構光投射于物體之上,并由成像設備采集并傳輸給計算單元,生成點云圖像。即其原理為通過在成像
2022-01-29 13:40:52
700mm-2000mm工作距離內可快速精準實現物體的三維點云重建,且該相機內部集成計算單元,配合千兆網線,可同時輸出點云圖、RGB、深度圖、灰度圖四種數據流。亞毫米級深度精度(0.
2022-03-21 16:16:04
700mm-2000mm工作距離內可快速精準實現物體的三維點云重建,且該相機內部集成計算單元,配合千兆網線,可同時輸出點云圖、RGB、深度圖、灰度圖四種數據流。亞毫米級深度精度(0.
2022-06-15 14:44:13
根據雙目視覺傳感器的工作原理, 分析了影響測量精度的因素, 表明雙目視覺傳感器的物體空間坐標與圖像坐標之間存在復雜的非線性映射關系, 其數學模型無法用解析式精確地加以
2009-07-10 15:53:11 11
11 介介紹:D300型深度相機采用主動式深度感知技術,它以DLP投影儀作為結構光投射器,將可編碼的條紋結構光投射于物體之上,并由成像單元采集并傳輸給計算單元,生成點云數據。產品特征:? 藍光LED光源
2022-12-14 11:27:02
ADS1278SHFQ:一款高性能模擬前端集成的深度解析隨著科技的飛速發展,模擬前端集成在電子設備中的應用日益廣泛。ADS1278SHFQ,作為TI公司的一款高性能模擬前端集成芯片,以其出色的性能
2024-02-16 17:13:34
CS30是一款RGBD深度相機,該相機搭載了分辨率640*480的ToF圖像傳感器和分辨率1920*1080的彩色圖像傳感器,利用ToF技術獲取物體和空間的三維信息,具備遠距離、低功耗等優良性能,為
2024-12-23 16:23:21
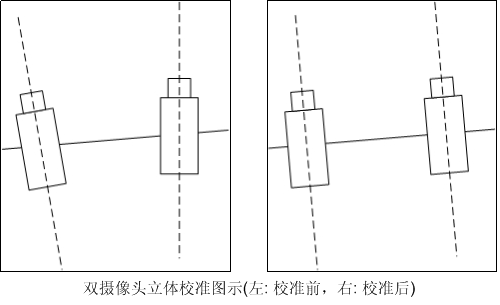
雙目視覺是利用機器視覺進行障礙物檢測的研究熱點。針對雙目視頻不同步,導致立體匹配不精準的問題,提出了一種基于圖像處理的雙目校準算法。算法首先根據道路的先驗特征模型,建立視覺校準的敏感區域,以減小
2015-12-18 16:26:5734 電子開發機器人相關教程資料——全自主機器人雙目視覺運動檢測
2016-09-06 16:42:430 今天,小蟻正式發布了旗下的雙目VR全景相機,這是目前能買到的最便宜的高像素全新相機之一。
2017-06-05 20:44:433896 ,保證調焦機構控制的準確性。文中提出一種測新型的繪相機調焦控制檢測系統,利用新型中斷式信號采集方法從電機控制端檢測并監視調焦控制電路輸出控制波形。介紹了檢測系統的原理、信號采集方式;給出該系統的組成,硬件軟
2017-11-15 16:52:2314 當前隨著3D相機在智能機器人領域的廣泛運用,越來越多的學者投入到了基于3D相機深度圖像的室內三維平面分割研究當中。文運用了一種快速而且比較穩定的方法去檢測復雜的平面,其中深度圖像是運用Kinect
2017-11-16 10:10:124 深度解析IoT領域4大“戰役”
2018-01-22 10:25:315243 雙目立體測量的特點類似于“雙目導航、定位”,一般來說:第一、需要提取的點不多,僅把被測物需要測量部分的點找到即可;第二、速度要求較高,一般要求一秒中測量多個產品;第三、對光照環境要求高。因為測量的時候相機和被測物必然有相對位移,所以拍攝到的圖像可能各個角度都會有。
2018-01-23 11:32:5323289 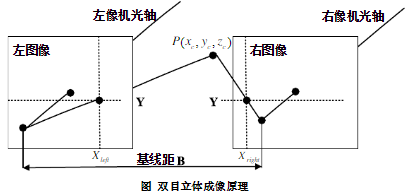
6月27日,MYNTAI(小覓智能)正式發布公司旗下雙目硬件系列新品——小覓雙目攝像頭深度版
2018-07-05 16:40:259589 一文解析PLC的應用,具體的跟隨小編一起來了解一下。
2018-07-19 11:21:566116 
機器人創新生態獲悉小覓智能CEO龐琳勇博士獲邀出席了“MWCS世界移動大會·上海 2018服務機器人核心技術與人工智能創新發展論壇”,于論壇現場正式發布了公司旗下雙目硬件系列新品——小覓雙目攝像頭深度版(MYNT EYE Depth)。
2018-07-24 17:46:305624 在這篇論文中,我們介紹了ActiveStereoNet,這是主動雙目立體成像系統(active stereo systems)的第一個深度學習解決方案。由于缺乏ground truth,我們的方法
2018-07-29 10:17:5411695 
本屆WRC,MYNTAI小覓智能首次以視覺識別技術軟硬件解決方案提供商的身份參展,會上同時展出了小覓雙目攝像頭標準版(MYNT EYE Standard)和小覓雙目攝像頭深度版beta兩款深度相機(以下簡稱S版和D版)。
2018-08-29 15:51:287663 在Apollo生態系統的大家庭里,在物流、工程等作業場景也得到了創新應用。會上,李彥宏還宣布了另一個量產“驚喜”——搭載中科慧眼雙目雙焦相機的新石器無人作業車也已量產下線了。
2018-09-04 17:30:377216 小覓雙目深度相機系列產品,均采用“雙目+IMU”的慣性導航核心硬件方案組合,內置六軸IMU傳感器,利用雙目和IMU數據的互補性,能為視覺以及空間移動算法的研發提供數據校正,IMU與圖像的同步精度高
2019-01-14 15:07:185701 眾所周知,自動駕駛、動作捕捉等場景非常依賴雙目立體相機采集圖像、位姿信息的清晰度、豐富度,單位時間內雙目相機提供的信息越多,越有利于相關場景的算法追蹤及定位,降低算法開發難度。 正因如此,為了滿足
2020-03-21 15:43:341273 在雙目相機領域是非常煎熬和糾結的,煎熬來自哪里呢?
2019-07-11 16:39:197103 據外媒報道,微軟已申請了一項被稱為“深度多光譜”相機的專利。該專利有望用于未來的Surface設備上,包括Surface Duo和Neo。據介紹,微軟研發的這項多光譜相機在某些方面要勝過蘋果的TrueDepth相機。
2019-12-16 11:21:192958 隨著AI技術和智能工業機器人的不斷發展,工業機器人和人工智能得到了越來越廣泛的普及,今天我們就來剖析下工業機器人視覺檢測的原理。視覺檢測等同于在工業機器人中使用相機。那么,工業機器人如何使用工業相機進行視覺檢測呢?
2020-07-30 16:36:066157 多個點觀察一個物體,獲取在不同視角下的圖像,根據圖像之間像素的匹配關系,通過三角測量原理計算出像素之間的偏移來獲取物體的三維信息。 得到了物體的景深信息,就可以計算出物體與相機之間的實際距離,物體3維大小,兩點之間實際距
2020-10-23 09:51:5713527 
上一期小編給大家介紹了TOF 與雙目結構光的對比,那在深度相機的應用方案種還有結構光的攝像方案。今天小編就跟大家來聊一聊結構光,順便也捋一捋這三者的對比。 結構光 結構光技術就是使用提前設計好的具有
2020-11-19 14:37:194141 為改善單目圖像語義分割網絡對圖像深度變化區域的分割效果,提出一種結合雙目圖像的深度信息和跨層次特征進行互補應用的語義分割模型。在不改變已有單目孿生網絡結構的前提下,利用該模型分別提取雙目左、右輸入
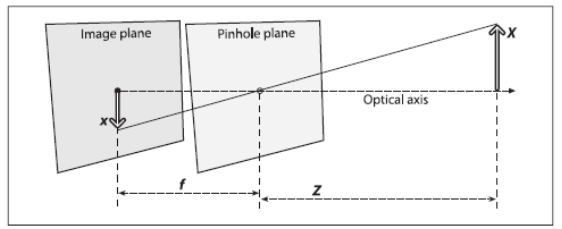
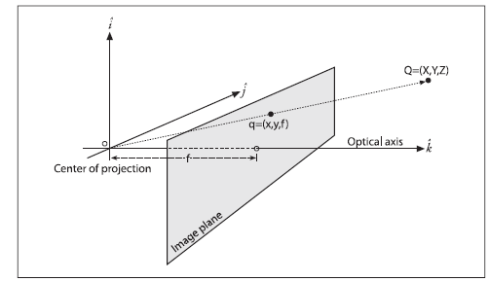
2021-03-19 14:35:2421 ,最簡單的單目成像是基于小孔成像的原理,三維空間中的點經過透視投影過程映射到圖像平面上,如此一來在透視線上的空間點都落在像平面上的同一點處。 所以普遍認為單目相機缺乏深度信息無法測距。(這里僅從成像原理出發,當然現
2021-04-26 13:36:395850 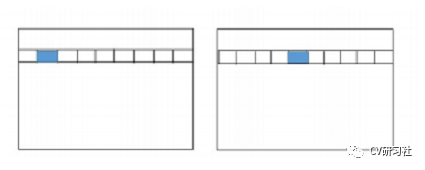
到不同類型的雙目攝像頭,左攝像頭和右攝像頭之間的距離不一樣。 2)雙目相機基線 基線越大,測量范圍越遠;基線越小,測量范圍越近。 建議: (1)基線距B是工作距離的08-2.2倍時測量誤差比較小; (2)雙目立體視覺的結構對稱時,
2021-04-26 14:19:4311538 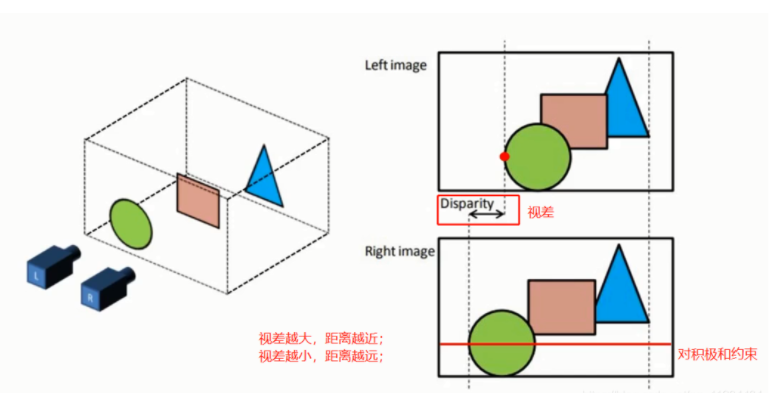
在這里我們所說的雙目標定是狹義的,講解理論的時候僅指兩臺相機之間相互位置的標定,在代碼實踐的時候,我們才說完整的雙目標定。
2021-07-04 11:04:1612628 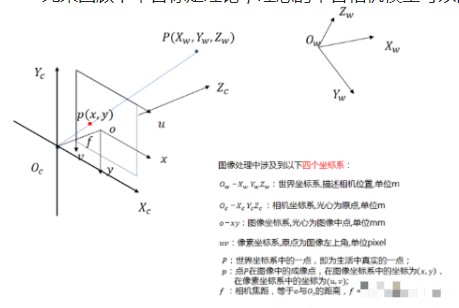
深度解析Asp.Net2.0中的Callback機制(ups電源技術維修)-該文檔為深度解析Asp.Net2.0中的Callback機制講解文檔,是一份還算不錯的參考文檔,感興趣的可以下載看看,,,,,,,,,,,,,,,,,
2021-09-27 16:28:201 工業4.0時代的到來,機器視覺檢測技術越來越被廣泛應用,針對各式應用也延伸出不同的需求,而相機選型向來執行計劃前相當重要的前導之一。工業相機僅是機器視覺檢測系統的代表之一。在整個機器視覺檢測技術中
2021-12-15 13:47:532383 說到相機,大家都不陌生了,如今基本上人手一臺相機或能拍照的手機。而在很多人不怎么涉足和了解的工業生產領域,工業相機在產品生產和檢測過程中起到了舉足輕重的作用。今天就由昊天宸小編為大家介紹工業相機
2021-12-24 15:51:282269 深度信息恢復是計算機視覺領域的一個重要研究內容。使用傳統的光學成像系統對不同距離的物體成像時,需要機械移動會造成圖像放大率變化,導致深度測量產生誤差。近年來,電控調焦的液晶透鏡光學成像系統已實現對焦、變焦、深度測量等功能,利用液晶透鏡光學成像系統進行雙目立體視覺深度測量可以擴張雙目深度測量范圍。
2022-06-14 13:43:183692 雙目標定和普通相機的標定一樣,其標定時不僅標定出兩個相機的內參,還要標定出兩個相機之間的關系。因此,在進行雙目標定時,需要使兩個相機對同一標定板進行多次取圖,分別標定出各自的內參和相對于標定板的外參,然后便可計算出兩相機位置間的關系:
2022-10-10 17:25:312360 高速相機是工業相機的一種,一般高速相機指的是數字工業相機,其一般安裝在機器流水線上代替人眼來做測量和判斷,通過數字圖像攝取目標轉換成圖像信號,傳送給專用的圖像處理系統。 高速相機,相比起普通相機
2022-12-13 16:26:412921 最近來看看一些雙目稠密匹配的算法。說來慚愧,SGM在航測領域是很重要的算法(當然也是最好的雙目稠密匹配算法之一),自己卻沒有認真讀過,只是大致有些了解。
2022-12-15 15:12:372384 在這里我們所說的雙目標定是狹義的,講解理論的時候僅指兩臺相機之間相互位置的標定,在代碼實踐的時候,我們才說完整的雙目標定。
2022-12-28 17:17:243623 視覺引導的室內搬運或者無人配送這種場景,有沒有合適的深度相機或雙目相機推薦?雙目相機的算力要求有多高啊?TOF和結構光相機適合這種場景嗎?
2023-01-04 10:14:312846 但由于缺陷多種多樣,傳統的機器視覺算法很難做到對缺陷特征完整的建模和遷移,所以越來越多的學者和工程人員開始將深度學習算法引入到缺陷檢測領域中。
2023-02-13 15:39:571946 雙目測距的原理就說到這里,為了避免大家看到大段純敘述性的文字頭暈,下面的行文將會以FAQ的形式圍繞著實現雙攝像頭測距過程中碰到的幾點疑惑展開。
2023-04-26 16:47:376795 
輸入數據來源可以是單目視覺相機、雙目視覺相機,數據可以是灰度圖或者彩色圖。
基于單目圖片的稱為單目車道線檢測技術,基于雙目圖片的稱為雙目車道線檢測技術。
2023-06-01 14:18:320 利用雙攝像頭進行測距的時候世界坐標的原點究竟在哪里? A:世界坐標系的原點是左攝像頭凸透鏡的光心。
2023-06-02 12:50:174890 
,本次展位號:W1館1368。
此次參展,維視智造將圍繞深度視覺系統解決方案、多相機并行檢測、超高速視覺檢測、視覺引導定位、超高精密測量、線掃高速檢測6大應用
2021-03-09 10:26:242265 
高光譜相機(Hyperspectral Imaging, HSI)是一種具有非常高光譜分辨率的成像技術。它能夠捕獲到一個物體的大量光譜特征,從而對物體進行深入的物理或化學屬性分析。在燒傷深度檢測中
2023-06-30 11:59:551128 
首先,課程介紹了雙目相機標定的基礎知識。我了解到雙目相機是由兩個相機組成的系統,通過同時拍攝目標物體的兩個視角來獲取三維信息。
2023-07-03 14:25:064392 
? 在深度相機的主流技術方案Structure Light,ToF,Stereo Dual)中,主動雙目成像方案可以基于低成本的硬件,獲得高分辨率、高精度的深度圖像,但是立體匹配算法(stereo
2023-07-04 11:33:514780 
相機硬件產品。 奧比中光Gemini 2入選中國信通院“鑄基計劃” Gemini 2 是一款搭載了奧比中光全新深度引擎芯片MX6600的雙目結構光3D相機,搭載三種深度工作模式,可為多種應用場景提供高質量的深度數據。它提供寬廣的視野,深度圖像測量范圍可達0.15 - 10m,集
2023-07-28 10:04:011761 
夠構建一個可以檢測、分析和響應人體運動的應用程序和系統。代碼我們的演示視頻如下,該視頻展示了這項技術的實際功能。您可以看到使用虹科AI深度相機實現人體姿勢估計是多
2023-07-31 17:42:261790 
雙相機道路檢測方案ZQLB機器視覺一體式成像組件,解決傳統道路檢測難題
2023-12-14 11:40:571418 
工業相機標定的方法根據工業相機的數目可分為單目標定、雙目標定Q以及多目標定。
2024-03-26 16:26:394227 
最大幀率(Frame Rate)/行頻(Line Rate):即相機采集傳輸圖像的速率,對于面陣相機一般為每秒采集的幀數(Frames/Sec.),對于線陣相機為每秒采集的行數(Hz)。
2024-04-05 04:22:004626 
一文快速了解面陣工業相機
2024-04-17 16:09:591393 
4月29日,奧比中光正式發布全新Gemini 330系列雙目3D相機,首發產品包括Gemini 335、Gemini 335L兩款通用型高性能雙目3D相機。
2024-04-30 10:41:212144 
設計的新一代深度引擎芯片MX6800,配備高性能主被動融合雙目成像系統,能夠在戶外、室內、夜晚、白晝等不同光照條件以及復雜多變的動態環境中穩定輸出高質量深度數據,精準還原場景和物體的3D信息,廣泛適用于AMR、巡檢機器人、配送機器人、人形機器人、機械臂、無人機、人體重建等機器
2024-04-30 18:00:531735 
電子發燒友網站提供《一文解析工業互聯網.pptx》資料免費下載
2025-02-20 16:42:511 和VIX系列推掃式高光譜相機的技術特點與實際應用案例,解析其在工業檢測中的核心價值。 一、高光譜相機檢測原理:從“成像”到“物質識別” 傳統機器視覺依賴可見光成像,僅能獲取物體的空間信息,而高光譜相機通過采集目標
2025-04-23 16:36:49788 Nginx核心功能深度解析
2025-05-09 10:50:32755 近日,奧比中光在美國底特律舉辦的Automate 2025展會上發布Gemini 435Le,獲得眾多機器人專業人士的關注。作為最新一代工業級雙目視覺解決方案,Gemini 435Le雙目3D相機在前作基礎上針對智能機器人的工業自動化應用場景進行了大幅提升,目前具備業界領先的深度感知性能。
2025-05-14 17:15:33975 圍繞“雙目智駕應用”,我們將推出系列文章深入解析雙目視覺如何跨越技術鴻溝,在中國智駕的沃土上生根發芽,探索其賦能未來出行的無限可能。
2025-07-09 16:21:471132 近日,世界機器人大會現場,奧比中光發布最新一代3D激光雷達及雙目深度相機,以“場景拓展”與“極限感知”為核心優勢,進階全領域能力矩陣,刷新機器人性能上限,為各類機器人帶來更靈活可靠的視覺解決方案。
2025-08-15 15:05:011261 產品概述本產品是一款高精度、5V供電的雙目立體視覺相機。它由兩個經過精密同步和校準的獨立相機組成,固定基線為60mm,專為三維空間感知與距離測量而設計。通過內置的立體匹配算法,可直接輸出高精度
2025-12-10 15:45:33279 
SN65LVDS315:相機并行RGB到MIPI CSI - 1串行轉換器的深度解析 在當今的電子設計領域,圖像數據的高效傳輸和處理至關重要。SN65LVDS315作為一款相機串行器,能夠將8位并行相機
2025-12-26 10:15:02110 轉化為三維信息,從而為車輛決策提供關鍵的深度感知能力。 什么是雙目深度估計? 平時我們用眼睛看東西其實就是一種最自然的深度估計。人的兩只眼睛有一定的間距,大腦通過融合兩只眼睛看到的略有不同的圖像來判斷遠近。計算
2025-12-31 09:45:50289 
RTK-SCAM-60是一款高精度雙目立體視覺相機,主打多接口兼容特性,專為全場景自動化產線適配設計,可廣泛應用于工業檢測、智能分揀、尺寸測量等自動化場景。產品采用5V供電,由兩個經過精密同步校準
2026-01-05 15:29:5451
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論