采用GPS/GSM技術(shù)開發(fā)防丟失個(gè)人定位系統(tǒng)。該系統(tǒng)用于搜索和保護(hù)丟失的小孩或智障老人。系統(tǒng)利用GPS定位技術(shù)獲得被保護(hù)人員的位置,判斷其是否脫離安全區(qū)域,并可通過GSM網(wǎng)絡(luò),將其位置信息發(fā)送給用戶。
2014-10-21 16:22:08 6832
6832 
室內(nèi)定位模擬算法
1、三角定位(Triangulation),需要借助固定基站或者已知基站位置信息,GPS等無線網(wǎng)絡(luò)定位法。
2、鄰近(Proximity), 使用具有有限的感知范圍和分析能力
2022-09-14 09:30:581148 技術(shù)的另一優(yōu)點(diǎn)為:首次捕獲GPS信號的時(shí)間一般僅需幾秒,不像GPS的首次捕獲時(shí)間可能要2~3分鐘。應(yīng)用A-GPS定位技術(shù)的主要功能是能夠?yàn)榻K端用戶提供高精度的位置信息。移動運(yùn)營商采用基于A-GPS定位
2014-04-28 13:51:29
大家好,我在利用ni vision assistant生成的模板匹配界面時(shí),想要將每一個(gè)匹配物體的位置信息導(dǎo)出到word或者Excel,但是他這個(gè)匹配個(gè)數(shù)不確定,怎么樣把匹配到的所有物體信息導(dǎo)出呀?利用哪些編程?謝謝大家了
2024-03-11 20:22:18
您好,目前使用貴司ad2s1210解碼芯片,遇到上電偶爾報(bào)奇偶校驗(yàn)故障,且電機(jī)運(yùn)行中存在位置信息突變情況。 位置和故障信息都是在配置模式通過spi讀取,位置突變時(shí)都是D7位由0變?yōu)?,例如:電機(jī)不動
2023-12-01 06:05:03
哪位高手做過labview捷聯(lián)慣導(dǎo)仿真?求個(gè)仿真程序參考下!!!!!
2010-11-23 15:07:46
labview現(xiàn)在可以采集編碼器的位置信息,但是由于是增量的編碼器,每次程序暫停后再運(yùn)行,編碼器的位置信息會自動清零,而不是在上一次數(shù)據(jù)的基礎(chǔ)上增大或者減小請教該如何解決。
2019-10-23 09:54:56
請問各位大神,我新安裝的USB驅(qū)動在NIMAX界面測試時(shí)顯示“位置信息不足或系統(tǒng)中不存在該設(shè)備或資源”是什么原因
2018-03-14 18:25:17
,產(chǎn)品主要應(yīng)用于車載等交通設(shè)備上,通過GPS模塊將采集的位置信息傳給dsp進(jìn)行數(shù)據(jù)解算,將解算后位置信息發(fā)送給cup核心控制單元,并在上位機(jī)軟件顯示。
2015-10-21 09:18:43
估計(jì)方法有些研究,希望能利用更高處理速度的芯片完成低成本捷聯(lián)慣導(dǎo)項(xiàng)目的開發(fā)。項(xiàng)目計(jì)劃:根據(jù)手冊學(xué)習(xí)STM32G431單片機(jī),并完成MSINS/GPS/CNS組合導(dǎo)航程序移植。預(yù)計(jì)成果:分享項(xiàng)目的開展,實(shí)施,結(jié)果過程,展示項(xiàng)目結(jié)果
2019-09-06 11:33:54
申請理由:在慣導(dǎo)中需要對慣導(dǎo)算法進(jìn)行處理項(xiàng)目描述:基于公司原有的平臺實(shí)現(xiàn)慣導(dǎo)及精確定位;在實(shí)際的開發(fā)中,慣導(dǎo)需要對算法的精確處理,因此選擇DSP做該項(xiàng)目
2015-11-06 10:00:36
什么是位置感知技術(shù)?位置感知技術(shù)是如何應(yīng)用的?位置感知技術(shù)主要有哪幾種類型?
2021-06-28 06:02:56
進(jìn)入隧道的軌跡,出現(xiàn)白色的灰色線跳躍。藍(lán)色標(biāo)識是測試車輛使用慣導(dǎo)模塊SKM-4DU在利用慣性導(dǎo)航系統(tǒng)通過隧道時(shí)的軌跡,可以展現(xiàn)出隧道的實(shí)際弧度獲得準(zhǔn)確的位置信息。整體來說,SKM-4DU將對車聯(lián)網(wǎng)
2017-10-12 18:13:02
四旋翼慣導(dǎo)融合之觀測傳感器滯后問題匯總與巴特沃斯低通濾波器設(shè)計(jì)(氣壓計(jì)MS5611、GPS模塊M8N、超聲波、PX4FLOW等)...
2021-08-09 08:05:06
基于GPS的公交車站點(diǎn)播報(bào)任務(wù)書本設(shè)計(jì)的主控芯片單片機(jī)為基礎(chǔ),利用GPS獲取比較精確的公交位置信息;并由AT89C51進(jìn)行智能整合處理信息,發(fā)送控制指令;利用ISD1700系統(tǒng)語音芯片實(shí)現(xiàn)語音播報(bào)
2022-02-15 06:24:43
采用GPS/GSM技術(shù)開發(fā)汽車防盜系統(tǒng)。系統(tǒng)利用GPS定位技術(shù)獲得車輛的位置,判斷車輛是否移動,并可通過GSM網(wǎng)絡(luò),將車輛位置信息發(fā)送給用戶。用戶可以通過GSM網(wǎng)絡(luò)對系統(tǒng)的工作狀態(tài)進(jìn)行設(shè)置。系統(tǒng)
2012-11-29 14:26:20
STM32F103RBT6 的SPI2接口實(shí)現(xiàn)與RFID讀卡器接口之間的數(shù)據(jù)通信,從而自動獲得景點(diǎn)位置信息,以控制選擇對應(yīng)景點(diǎn)導(dǎo)覽語音的播放。讀卡器中斷狀態(tài)直接與STM32F103 的PD口I/O引腳連接
2017-06-23 10:51:49
輸出可通過中斷狀態(tài)信息和串口與外部連接。因此,系統(tǒng)利用STM32F103RBT6的SPI2接口實(shí)現(xiàn)與RFID讀卡器接口之間的數(shù)據(jù)通信,從而自動獲得景點(diǎn)位置信息,以控制選擇對應(yīng)景點(diǎn)導(dǎo)覽語音的播放。讀卡器
2015-09-29 14:28:12
) 看到上面的格式后,結(jié)合前面幾篇blog中有關(guān)的XML文件的解析和python腳本消息的操作,這就非常簡單了,我們?nèi)绻枰x取GPS報(bào)文中的位置信息和時(shí)間信息,就可以設(shè)計(jì)下面的函數(shù)來完成: class
2018-09-28 11:54:39
通過RTT 系統(tǒng)例子的串口,讀取串口數(shù)據(jù),按照慣導(dǎo)串口協(xié)議解析出方位、俯仰,橫滾角度,但是發(fā)現(xiàn)每次解析獲取的數(shù)據(jù)比串口吐出來的數(shù)據(jù)有大概200ms 的延時(shí),不知道怎么消除延時(shí)。目前解析實(shí)現(xiàn)方案:采用
2022-11-08 10:35:11
研究在GPS信息缺失的情況下,如何通過一定的算法產(chǎn)生模擬GPS信息,從而實(shí)現(xiàn)全天候的無縫位置感知。這在某些對位置信息敏感的場合中就顯得非常急迫和重要。
2019-10-14 06:04:37
我想讀取鼠標(biāo)位置信息,求大神賜教
2016-06-28 23:30:47
。另外在GPS系統(tǒng)出現(xiàn)故障的情況下,比如在城市環(huán)境中,GPS信號受遮擋,不能提供位置和速度信息的時(shí)候,慣導(dǎo)系統(tǒng)依然能夠在一定時(shí)間bridge 這個(gè)gps gap。 同時(shí)由于慣導(dǎo)系統(tǒng)的誤差是積累的,所以
2014-01-17 21:38:17
性導(dǎo)航系統(tǒng) INS( Inertia Navigation System,以下簡稱慣導(dǎo)) 慣導(dǎo)是一種利用慣性傳感器測量載體的比力及角速度信息,并結(jié)合給定的初始條件實(shí)時(shí)推算速度、位置、姿態(tài)等參數(shù)的自主
2020-05-18 06:15:18
的這些疑惑為大家作出解答: 這個(gè)問題其實(shí)可拆分為兩個(gè),因?yàn)槭謾C(jī)GPS導(dǎo)航分為基于GPS芯片定位和基于移動運(yùn)營網(wǎng)的基站的定位兩種,前一種利用手機(jī)上的GPS定位模塊將自己的位置信號發(fā)送到定位后臺來實(shí)現(xiàn)手機(jī)
2016-09-05 16:44:29
相位誤差。根據(jù)濾波電路的特點(diǎn)提出了基于直線擬合技術(shù)的轉(zhuǎn)子位置信號相位補(bǔ)償方法,并將其用于BLDCM 無位置傳感器控制系統(tǒng)。實(shí)驗(yàn)結(jié)果表明,該補(bǔ)償策略能顯著提高轉(zhuǎn)子位置的辨識精度,改善電機(jī)運(yùn)行性能
2025-07-10 16:40:19
求教!!!如何利用labview串口對慣導(dǎo)模塊進(jìn)行參數(shù)解析,有協(xié)議!!!
2017-03-17 19:59:42
電機(jī)位置信號的重要性在永磁同步電機(jī)FOC控制算法中,需要用到一個(gè)非常重要的物理量是電機(jī)的位置信號。這個(gè)位置信號到底有多重要呢?還是用數(shù)據(jù)來說話吧。筆者搭建了一個(gè)電機(jī)的電流環(huán)仿真模型,固定電機(jī)轉(zhuǎn)速
2021-08-27 07:36:41
疑惑為大家作出解答: 這個(gè)問題其實(shí)可拆分為兩個(gè),因?yàn)槭謾C(jī)GPS導(dǎo)航分為基于GPS芯片定位和基于移動運(yùn)營網(wǎng)的基站的定位兩種,前一種利用手機(jī)上的GPS定位模塊將自己的位置信號發(fā)送到定位后臺來實(shí)現(xiàn)手機(jī)定位
2020-08-24 00:41:36
高精度游移方位捷聯(lián)慣導(dǎo)系統(tǒng)的數(shù)字仿真::捷聯(lián)慣導(dǎo)系統(tǒng)的數(shù)字仿真對于系統(tǒng)設(shè)計(jì)、方案論證和算法研究有著重要的意義,特別是游移方位捷聯(lián)慣導(dǎo)系統(tǒng). 因此通過完成軌跡發(fā)生
2009-06-21 22:37:35 19
19 本文介紹了一種基于FPGA 的光纖陀螺慣導(dǎo)系統(tǒng)溫控電路接口設(shè)計(jì)。主要說明了溫控電路整體結(jié)構(gòu),溫控電路工作流程,F(xiàn)PGA 與外圍電路的通信接口和FPGA 的邏輯設(shè)計(jì)等幾個(gè)方面。
2010-01-13 15:20:3824 本文對GPS車輛衛(wèi)星定位系統(tǒng)的硬件架構(gòu)與軟件的設(shè)計(jì)進(jìn)行了探討,系統(tǒng)采用GSM作為數(shù)據(jù)傳輸?shù)拿浇椋肞C機(jī)當(dāng)作是控制中心,用小車代替車輛。系統(tǒng)由GPS發(fā)出位置信息,再由 GSM把信
2010-07-13 17:24:5923 本文介紹了開關(guān)磁阻電機(jī)位置信息鎖相跟蹤和測速的方法,重點(diǎn)探討利用SOPC技術(shù)設(shè)計(jì)實(shí)現(xiàn)轉(zhuǎn)子位置角度細(xì)化和鎖相測速的問題。討論了設(shè)計(jì)思想和實(shí)現(xiàn)方案,運(yùn)用Quartus軟件進(jìn)行了相
2010-07-17 17:11:309
位置信號變送器電路
2009-02-19 22:21:12457 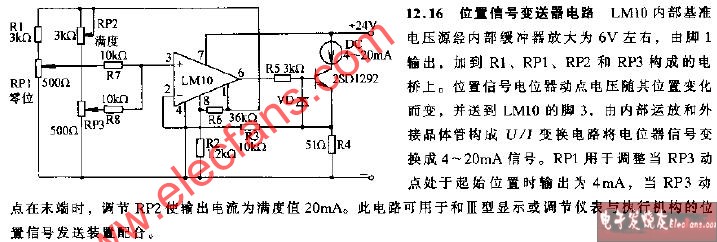
本文將基于CY7C68013A的USB接口技術(shù)應(yīng)用于慣導(dǎo)系統(tǒng)數(shù)據(jù)通信,創(chuàng)新性的設(shè)立圓形緩沖區(qū)解決了USB接口數(shù)據(jù)傳輸過程中的丟幀問題。
2011-04-11 11:30:352699 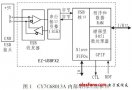
機(jī)載合成孔徑雷達(dá)使用陀螺穩(wěn)定平臺使天線在慣性空間保持穩(wěn)定并跟蹤地速方向. 穩(wěn)定平臺需要對分別來自于慣導(dǎo)系統(tǒng),光纖陀螺,光電碼盤的指令角、實(shí)際角速度、實(shí)際角位置信號進(jìn)行采
2011-09-13 15:06:1126 本設(shè)計(jì)主要實(shí)現(xiàn)電子巡查系統(tǒng)(圖1)智能終端兩個(gè)關(guān)鍵技術(shù)環(huán)節(jié):GPS信息獲取以及空間位置信息、總臺命令的無線交互傳輸。
2011-09-16 09:50:041419 
文中針對水下自主航行器提出了一種新型的基于捷聯(lián)慣導(dǎo)(SINS)和GPS的組合導(dǎo)航系統(tǒng)設(shè)計(jì)方案。該方案以捷聯(lián)慣導(dǎo)作為主系統(tǒng),同時(shí)利用GPS重調(diào)捷聯(lián)慣導(dǎo)系統(tǒng),建立了該組合導(dǎo)航系統(tǒng)的
2013-08-20 11:33:2432 C語言教程之查找位置信息,很好的C語言資料,快來學(xué)習(xí)吧。
2016-04-25 16:09:480 捷聯(lián)慣導(dǎo)系統(tǒng)中微機(jī)械陀螺測試參數(shù)的分析與標(biāo)定
2016-12-17 16:33:397 提起定位導(dǎo)航,大家首先想到的是GPS,中國也推出了自己的衛(wèi)星定位系統(tǒng)北斗衛(wèi)星定位系統(tǒng)。但是衛(wèi)星定位只能用在室外環(huán)境,一到室內(nèi),由于導(dǎo)航信號衰減太快,衛(wèi)星定位就無法使用。在本文中,作者結(jié)合自己的工作經(jīng)驗(yàn)談了談微慣導(dǎo)定位方案,以及為什么選擇這個(gè)方案背后的緣由。
2016-12-16 02:52:111143 
層次分析的慣導(dǎo)_重力匹配導(dǎo)航系統(tǒng)性能評估方法_陳晶
2017-03-19 19:03:122 )。所以有必要研究在GPS信息缺失的情況下,如何通過一定的算法產(chǎn)生模擬GPS信息,從而實(shí)現(xiàn)全天候的無縫位置感知。這在某些對位置信息敏感的場合中就顯得非常急迫和重要。 1 慣導(dǎo)芯片簡介 ADIS16003是ADI公司的一款低成本、低功耗,具有SPI接口的雙
2017-11-27 10:19:590 采用商用MEMS傳感器設(shè)計(jì)一種小型捷聯(lián)慣導(dǎo)系統(tǒng)。該系統(tǒng)利用外部16位AD高速采樣芯片進(jìn)行傳感器數(shù)據(jù)采集,選用兩片TMS320F28335DSP作為數(shù)據(jù)預(yù)處理單元和導(dǎo)航解算單元,同時(shí)在初始對準(zhǔn)和陀螺
2017-11-29 11:21:2722 Android手機(jī)用戶在日常使用中產(chǎn)生了大量的地理位置信息。在手機(jī)取證調(diào)查中,這些地理位置信息能夠有效反映用戶的行為軌跡,具有重要的證據(jù)價(jià)值,同時(shí)也為案件偵破提供重要線索。目前,公安機(jī)關(guān)在案件的偵破
2017-11-30 16:14:540 目前與位置相關(guān)的移動應(yīng)用越來越多,傳統(tǒng)應(yīng)用分發(fā)模式中,用戶需要手動對應(yīng)用進(jìn)行搜索、下載、安裝以及卸載,不利于提升用戶使用應(yīng)用服務(wù)的體驗(yàn)。設(shè)計(jì)并實(shí)現(xiàn)了基于位置信息的流式移動應(yīng)用推送系統(tǒng),該系統(tǒng)中服
2017-12-05 16:55:370 針對捷聯(lián)慣導(dǎo)系統(tǒng)中初始對準(zhǔn)的問題,本文采用了設(shè)計(jì)卡爾曼濾波器的方法,通過建立慣導(dǎo)系統(tǒng)的誤差模型,分析卡爾曼濾波的基本理論,以東向和北向速度誤差進(jìn)行分析。通過初始對準(zhǔn)計(jì)算機(jī)仿真結(jié)果,進(jìn)一步驗(yàn)證了該方法
2017-12-07 16:26:583 針對無線傳感器網(wǎng)絡(luò)(WSN)的高能效路由選擇問題,在混合式能量均衡分簇(HEED)算法基礎(chǔ)上提出一種基于位置信息的低能耗雙簇頭多跳路由算法( HEED-EELD)。假設(shè)網(wǎng)絡(luò)中所有節(jié)點(diǎn)都具有位置感知
2018-01-14 13:32:010 針對大規(guī)模MIMO系統(tǒng)中的導(dǎo)頻污染問題,提出了一種基于用戶位置信息的導(dǎo)頻分配方案。所提方案根據(jù)用戶位置在以所在小區(qū)基站為極點(diǎn)的極坐標(biāo)系下的極角大小,對用戶進(jìn)行排序并依次分配導(dǎo)頻。方案結(jié)合了定向天線
2018-01-16 14:40:540 來了!慣導(dǎo)模塊為彌補(bǔ)車載導(dǎo)航系統(tǒng)應(yīng)用中,GPS衛(wèi)星導(dǎo)航在樹木遮擋、高樓林立、高架下以及隧道和地下停車場等弱信號環(huán)境無法提供準(zhǔn)確的定位信息這一技術(shù)缺陷;滿足日益增長的車載導(dǎo)航對弱信號環(huán)境的高精度定位需求
2018-03-09 10:17:4425960 來了! 為彌補(bǔ)車載導(dǎo)航系統(tǒng)應(yīng)用中,GPS衛(wèi)星導(dǎo)航在樹木遮擋、高樓林立、高架下以及隧道和地下停車場等弱信號環(huán)境無法提供準(zhǔn)確的定位信息這一技術(shù)缺陷,滿足日益增長的車載導(dǎo)航對弱信號環(huán)境的高精度定位需求,SKYLAB團(tuán)隊(duì)研發(fā)推出了同時(shí)支持GNSS/INS組合導(dǎo)航定位的
2018-03-16 15:54:2240 電機(jī)控制系統(tǒng)中的電機(jī)位置信息采集技術(shù)
2018-08-22 00:20:005057 信號環(huán)境無法提供準(zhǔn)確的定位信息,位置會出現(xiàn)小量漂移,而同時(shí)支持GNSS/INS組合導(dǎo)航定位的高性能車載組合慣導(dǎo)模塊SKM-4DX滿足日益增長的車載導(dǎo)航對弱信號環(huán)境的高精度定位需求。公交車智能交通
2018-08-08 12:33:404936 美聯(lián)社說,從2014年以來,谷歌就證明了利用位置信息推動在線廣告流量方面的有效性。2017年,谷歌廣告營收達(dá)到了954億美元,增長了20%之多,也被認(rèn)為跟位置相關(guān)信息利用緊密相關(guān)。就在7月舉行的谷歌
2018-08-30 11:02:563655 ,會造成電機(jī)的運(yùn)行性能問題。? ? ? 而無霍爾直流無刷電機(jī)運(yùn)行平穩(wěn)、起動可靠,采用的是不直接使用轉(zhuǎn)子霍爾傳感器,但在電機(jī)的運(yùn)行中需要轉(zhuǎn)子位置信號來控制電機(jī)換相,轉(zhuǎn)子的位置信號檢測大多數(shù)采用的是檢測
2019-04-28 20:19:0313413 的前提下,提高慣性導(dǎo)航系統(tǒng)精度的有效途徑。目前,對慣導(dǎo)系統(tǒng)的誤差修正均采用外信息(如 GPS 的輸出信息)校正, 即在 INS 工作的全部時(shí)間內(nèi),定期地利用 GPS 輸出的速度和位置信息與 INS 輸出的相應(yīng)信息的差值作為觀測量, 對 IN
2019-09-19 08:00:0015 GPRS是如何獲取位置的呢?GPRS不同于GPS,我們都知道GPS是通過衛(wèi)星來定位,而GPRS是通過基站來定位,其定位精度收到通信基站的位置和密度的影響在沒有基站的位置上,誤差范圍會比較大,也許系有人會問既然GPS定位更精準(zhǔn),拿為什么還需要基站定位呢?
2020-01-24 17:43:003654 GPS組合慣導(dǎo)與慣性導(dǎo)航的的應(yīng)用 即體系包含衛(wèi)星定位體系(GPS/斗極/GNSS)和慣性定向定位導(dǎo)航體系(INS)的定向定位導(dǎo)航體系。 衛(wèi)星定位導(dǎo)航體系具有精度高,可通訊的特點(diǎn),可是需要從外界獲取信息
2020-06-11 11:33:305327 航空航天飛機(jī)中的慣導(dǎo)是怎么工作的 現(xiàn)如今慣導(dǎo)已經(jīng)更新了幾代,大部分分機(jī)安裝的是高精度捷聯(lián)式慣導(dǎo),跟之前笨重的平臺式慣導(dǎo)系統(tǒng)比較更方便輕巧。 慣性導(dǎo)航系統(tǒng)(INS)也稱作慣性參考系統(tǒng)是一種不依賴于外部
2020-06-11 11:26:094606 GPS組合慣導(dǎo)與慣性導(dǎo)航的的應(yīng)用 即體系包含衛(wèi)星定位體系(GPS/斗極/GNSS)和慣性定向定位導(dǎo)航體系(INS)的定向定位導(dǎo)航體系。 衛(wèi)星定位導(dǎo)航體系具有精度高,可通訊的特點(diǎn),可是需要從外界獲取信息
2020-03-28 11:24:294458 現(xiàn)如今慣導(dǎo)已經(jīng)更新了幾代,大部分分機(jī)安裝的是高精度捷聯(lián)式慣導(dǎo),跟之前笨重的平臺式慣導(dǎo)系統(tǒng)比較更方便輕巧。 慣性導(dǎo)航系統(tǒng)(INS)也稱作慣性參考系統(tǒng)是一種不依賴于外部信息、也不向外部輻射能量(如無
2020-06-15 11:09:199262 海上組合慣導(dǎo)的介紹(關(guān)于慣導(dǎo)在海上的應(yīng)用) 海上組合導(dǎo)航海上組合導(dǎo)航體系大致可分為簡易型和大型兩類。 簡易型組合導(dǎo)航體系選用大規(guī)模集成電路、模塊結(jié)構(gòu)和微型計(jì)算機(jī)控制,其長處是結(jié)構(gòu)緊湊、牢靠、簡便
2020-03-28 10:19:162387 ,希望能夠加深新手工程師們對GNSS定位模塊不同分類的認(rèn)識,如果能幫助到各位工程師的GPS模塊、北斗模塊選型就更好了! GPS模塊、北斗模塊、慣導(dǎo)模塊、高精度定位模塊的區(qū)別: 1、芯片不一樣:SKYLAB研發(fā)推出的GPS模塊、北斗模塊、慣導(dǎo)模塊、高精度定位模塊內(nèi)置
2020-10-14 14:58:4017287 平臺式慣導(dǎo)系統(tǒng)的力學(xué)編排是指實(shí)現(xiàn)正確控制慣性平臺和解算導(dǎo)航參數(shù)的方案和方程,包括平臺指令角速度的計(jì)算公式、速度和位置的解算方程。
2020-03-30 08:00:000 組合慣導(dǎo)的的實(shí)際應(yīng)用介紹 衛(wèi)星組合慣導(dǎo)定位體系即體系包含衛(wèi)星定位體系(GPS/斗極)和慣性定向定位導(dǎo)航體系(INS)的定向定位導(dǎo)航體系。 衛(wèi)星定位導(dǎo)航體統(tǒng)具有精度高,可通訊的特點(diǎn)可是需要從外界獲取信息
2020-06-08 17:12:054551 GPS組合慣導(dǎo)的發(fā)展史 慣性導(dǎo)航系統(tǒng)-INS是一種不依賴于外部信息、也不向外部輻射能量的自主式導(dǎo)航系統(tǒng)。其工作環(huán)境不僅包括空中、地面,還可以在水下。慣導(dǎo)的基本工作原理是以牛頓力學(xué)定律為基礎(chǔ),通過測量
2020-04-20 10:12:102488 GPS組合慣導(dǎo)的發(fā)展路程 慣性導(dǎo)航系統(tǒng)-INS是一種不依賴于外部信息、也不向外部輻射能量的自主式導(dǎo)航系統(tǒng)。其工作環(huán)境不僅包括空中、地面,還可以在水下。慣導(dǎo)的基本工作原理是以牛頓力學(xué)定律為基礎(chǔ),通過
2020-04-18 00:34:141286 近年來,廣大科研工作者研究了各種減小壓電捷聯(lián)慣導(dǎo)系統(tǒng)的誤差方法,使壓電慣性器件的精度得到了極大的提高。本文介紹了一種實(shí)用的基于DSP實(shí)現(xiàn)的壓電捷聯(lián)慣導(dǎo)系統(tǒng)方案。
2020-04-22 10:10:211864 
GPS組合慣導(dǎo)的組成 慣性導(dǎo)航系統(tǒng)-INS是一種不依賴于外部信息、也不向外部輻射能量的自主式導(dǎo)航系統(tǒng)。其工作環(huán)境不僅包括空中、地面,還可以在水下。慣導(dǎo)的基本工作原理是以牛頓力學(xué)定律為基礎(chǔ),通過測量
2020-05-18 15:48:433621 IMU和INS的區(qū)別 位置定位和姿態(tài)測量除了全球GPS定位這個(gè)系統(tǒng),還有就是慣導(dǎo)系統(tǒng)。 這里簡單介紹一下關(guān)于慣導(dǎo)的一些進(jìn)本原理和所用的地方以及imu與ins的區(qū)別。 慣性導(dǎo)航通過測量飛行器的加速度
2020-05-18 16:51:156189 ,是一種自主式導(dǎo)航系統(tǒng)。 INS慣導(dǎo)系統(tǒng)慣性導(dǎo)航系統(tǒng)是一種利用安裝在運(yùn)載體上的陀螺儀和加速度計(jì)來測定運(yùn)載體位置的一個(gè)系統(tǒng)。通過陀螺儀和加速度計(jì)的測量數(shù)據(jù),可以確定運(yùn)載體在慣性參考坐標(biāo)系中的運(yùn)動,同時(shí)也能夠計(jì)算出運(yùn)載體在慣
2020-05-18 16:59:142849 國內(nèi)GPS組合慣導(dǎo)的發(fā)展 捷聯(lián)慣性系統(tǒng)由于結(jié)構(gòu)簡單、可靠性好、體積小、重量輕、成本低、容易維修等特點(diǎn),近年來得到很快的發(fā)展,并且在一些戰(zhàn)術(shù)武器中得到應(yīng)用。由于精度尚未達(dá)到平臺系統(tǒng)的精度水平,所以
2020-05-18 17:01:021830 國內(nèi)GPS組合慣導(dǎo)的發(fā)展 捷聯(lián)慣性系統(tǒng)由于結(jié)構(gòu)簡單、可靠性好、體積小、重量輕、成本低、容易維修等特點(diǎn),近年來得到很快的發(fā)展,并且在一些戰(zhàn)術(shù)武器中得到應(yīng)用。由于精度尚未達(dá)到平臺系統(tǒng)的精度水平,所以
2020-04-26 11:10:001669 慣性導(dǎo)航系統(tǒng)是一種不依賴于外部信息、也不向外部輻射能量的自主式導(dǎo)航系統(tǒng),廣泛應(yīng)用在軍機(jī)、民機(jī)、戰(zhàn)車、制導(dǎo)武器、火控系統(tǒng)、水下兵器等裝備上,其具有如下優(yōu)點(diǎn): 應(yīng)用場景: 在慣導(dǎo)系統(tǒng)的設(shè)計(jì)驗(yàn)證、生產(chǎn)組
2020-04-27 11:51:442206 多小區(qū)多用戶大規(guī)模MIMO系統(tǒng)在實(shí)際應(yīng)用場景中,由于大量用戶被隨機(jī)分配到同一扇區(qū)從而導(dǎo)致用戶通信質(zhì)量下降甚至無法進(jìn)行可靠通信。為解決該問題,提出一種基于用戶位置信息的導(dǎo)頻分配方法。以用戶到達(dá)基站
2021-03-26 15:58:5013 、操作簡單、可靠性高,催生了觸摸屏武器控制系統(tǒng)的誕生,如美軍的單兵觸摸式GPS導(dǎo)航儀、德軍的觸摸式火炮瞄準(zhǔn)系統(tǒng)等。我國的捷聯(lián)慣導(dǎo)系統(tǒng)起步較晚,但由于國內(nèi)相關(guān)器件(如:激光陀螺、加速度計(jì))的制造技術(shù)相繼
2021-03-29 10:48:304307 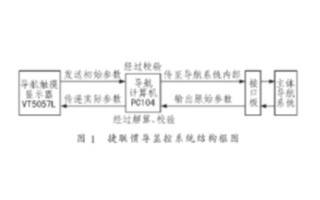
1.GPS接收器(garmin gps 35),它提供車輛的位置信息
2021-04-02 11:31:444506 
正弦編碼器高分辨率位置信息的提取
2021-05-17 16:56:072 無線網(wǎng)絡(luò)信號的可靠性、消息傳輸?shù)膶?shí)時(shí)性及道路交通狀況信息,提岀一種基于位置信息的多車協(xié)冋碰撞預(yù)警協(xié)議( vehicleα ollision waπ Ing prot?ol,VCwP)。該協(xié)議在通信范內(nèi)選取首選轉(zhuǎn)發(fā)車和候選轉(zhuǎn)發(fā)車,在進(jìn)行退避時(shí)間的選取時(shí),采取基于鄰節(jié)點(diǎn)密度的信道競爭機(jī)制,以保證EWM在
2021-06-17 16:56:168 MEMS陀螺捷聯(lián)慣導(dǎo)系統(tǒng)標(biāo)定方法綜述
2021-08-05 16:54:136 MEMS 陀螺慣組的數(shù)學(xué)模型,標(biāo)定和補(bǔ)償是提高 MEMS 慣組性能 是一篇值得學(xué)習(xí)的文章。
2022-07-04 14:50:572 在本教程中,我們將使用 LoRa 構(gòu)建 GPS 跟蹤系統(tǒng),該系統(tǒng)將包含一個(gè)發(fā)射器,該發(fā)射器將從NEO-6M GPS 模塊讀取位置信息并通過 Lora 無線傳輸。接收器部分將接收信息并將其顯示在16x2 LCD 顯示器上。
2022-08-31 16:08:072907 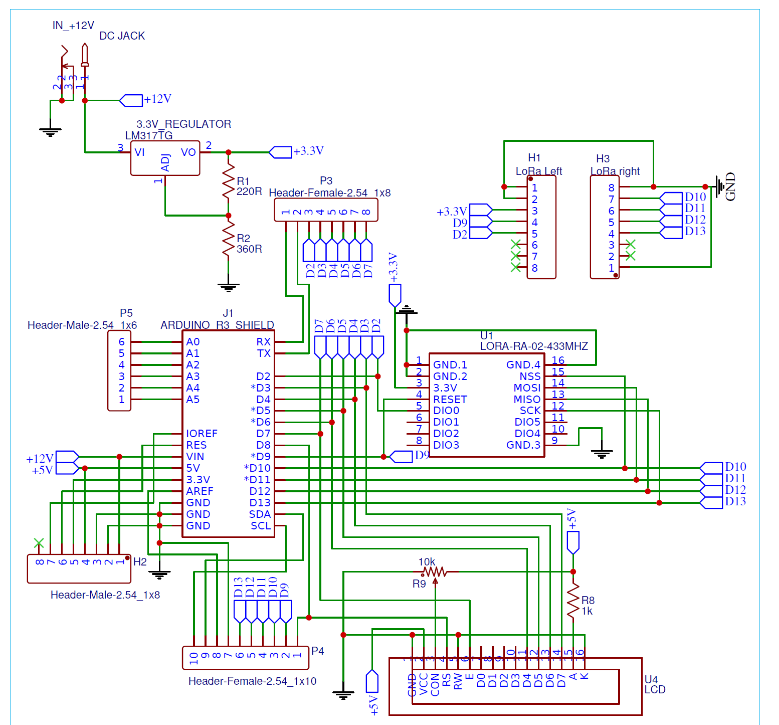
一個(gè)建立在兩個(gè)基于直接法的緊耦合的完整的激光視覺慣導(dǎo)融合的slam框架;
2022-11-09 09:55:542417 在慣導(dǎo)系統(tǒng)中慣性傳感器(陀螺和加速度計(jì))直接與運(yùn)載體固連,通過導(dǎo)航計(jì)算機(jī)采集慣性器件的輸出信息并進(jìn)行數(shù)值積分求解運(yùn)載體的姿態(tài)、速度和位置等導(dǎo)航參數(shù)。
2023-02-21 09:52:251831 在慣導(dǎo)系統(tǒng)中慣性傳感器(陀螺和加速度計(jì))直接與運(yùn)載體固連,通過導(dǎo)航計(jì)算機(jī)采集慣性器件的輸出信息并進(jìn)行數(shù)值積分求解運(yùn)載體的姿態(tài)、速度和位置等導(dǎo)航參數(shù),這三組參數(shù)的求解過程即所謂的姿態(tài)更新算法、速度更新算法和位置更新算法。
2023-02-21 09:53:273747 GPS能室內(nèi)定位嗎? GPS(全球衛(wèi)星導(dǎo)航系統(tǒng))是一種使用衛(wèi)星技術(shù)進(jìn)行定位和導(dǎo)航的系統(tǒng),它可以在戶外環(huán)境下非常準(zhǔn)確地確定位置信息。然而,在室內(nèi)環(huán)境下,GPS的定位準(zhǔn)確性會大大下降,甚至無法使用。因此
2023-12-12 14:39:573649 GPS全稱為Global Positioning System,就是全球定位系統(tǒng)。它由一系列的衛(wèi)星和地面控制站組成,用來提供準(zhǔn)確的地理位置和時(shí)間信息。GPS衛(wèi)星信號的組成原理涉及時(shí)間測量、衛(wèi)星軌道
2024-01-09 10:35:233131 如何在多個(gè)領(lǐng)域中發(fā)揮關(guān)鍵作用。 1. 高精度導(dǎo)航: 慣導(dǎo)技術(shù)通過使用加速度計(jì)和陀螺儀等傳感器,不僅可以提供高精度的位置信息,還能在GNSS信號受阻或不可用的環(huán)境中維持導(dǎo)航的連續(xù)性。這對于需要高精度導(dǎo)航的領(lǐng)域,如航空、汽車導(dǎo)航和
2024-02-01 14:12:111373 GPS 是一種通過衛(wèi)星信號來確定接收設(shè)備位置的定位技術(shù)。手機(jī)內(nèi)置的 GPS 芯片可以接收來自衛(wèi)星的信號,通過計(jì)算接收時(shí)間和衛(wèi)星位置信息來確定手機(jī)的準(zhǔn)確位置。
2024-02-26 15:19:1310057 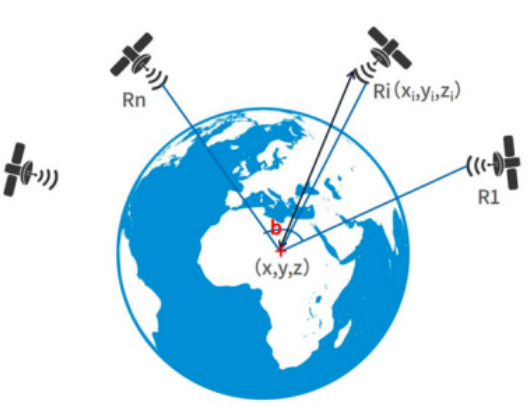
4月25日,導(dǎo)遠(yuǎn)科技在北京國際汽車博覽會首次公開展示其自主研發(fā)的新一代MEMS慣導(dǎo)芯片,據(jù)悉該款MEMS芯片已流片成功,即將進(jìn)入量產(chǎn)。
2024-04-28 09:03:102437 
ABB機(jī)器人設(shè)置原點(diǎn)位置信號是一個(gè)重要的步驟,它可以幫助機(jī)器人準(zhǔn)確地定位和執(zhí)行任務(wù)。 了解原點(diǎn)位置信號的重要性 原點(diǎn)位置信號是機(jī)器人編程和操作的基礎(chǔ)。它為機(jī)器人提供了一個(gè)參考點(diǎn),使得機(jī)器人能夠在正確
2024-06-17 09:24:204432 艦艇慣導(dǎo)系統(tǒng)通過慣性測量裝置獲取艦艇運(yùn)動參數(shù),實(shí)現(xiàn)自主、連續(xù)、隱蔽的導(dǎo)航,提供航向、速度等關(guān)鍵信息。未來趨勢包括高精度化、多傳感器融合和自主導(dǎo)航能力提升,為船舶航行帶來更多便利和安全。
2024-09-30 15:46:271503 導(dǎo)領(lǐng)域的領(lǐng)先優(yōu)勢,深化光纖陀螺及慣導(dǎo)核心光學(xué)器件布局,并推動高集成、高精度、高性價(jià)比光纖陀螺及光纖慣導(dǎo)系統(tǒng)的研發(fā)與量產(chǎn)。 同時(shí),天陸海導(dǎo)航宣布與戰(zhàn)略伙伴簽署萬臺量級高精度光纖慣導(dǎo)系統(tǒng)供應(yīng)協(xié)議,標(biāo)志著其技術(shù)實(shí)力與量產(chǎn)能
2025-07-24 18:20:081389
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論