 電子發(fā)燒友App
電子發(fā)燒友App



虞卞雨萱 1,陸科林 1 ,符啟恩 1,張寧 2
(1. 東南大學(xué)自動化學(xué)院,南京 210096; 2. 北京機電工程研究所,北京 100074)
【引用格式】虞卞雨萱,陸科林,符啟恩,等。 基于神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波融合的天線罩誤差斜率估計方法[J]。戰(zhàn)術(shù)導(dǎo)彈技術(shù),2023(1):121-131.
DOI:10.16358/j.issn.1009-1300.20220183
摘 要為消除導(dǎo)引頭天線罩引入的瞄準(zhǔn)誤差對制導(dǎo)系統(tǒng)穩(wěn)定性和精度造成的負面影響,提出了一種基于神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波融合的天線罩誤差斜率估計方法。考慮先驗?zāi)P椭R,分別建立導(dǎo)引頭、自動駕駛儀、彈目相對運動系統(tǒng)和彈體動力學(xué)系統(tǒng)的動態(tài)模型,選取真實視線角、視角和天線罩誤差斜率作為狀態(tài)變量,根據(jù)視線角觀測值建立測量模型。考慮到模型的不確定性,基于神經(jīng)網(wǎng)絡(luò)技術(shù)學(xué)習(xí)非線性濾波模型中的動力學(xué)方程,結(jié)合無跡卡爾曼濾波技術(shù),根據(jù)所學(xué)習(xí)的代理模型和帶噪聲的系統(tǒng)量測,對天線罩誤差斜率等狀態(tài)進行實時在線估計。與傳統(tǒng)采用非線性濾波技術(shù)的天線罩誤差斜率估計方法相比,本方法基于數(shù)據(jù)驅(qū)動思想,減少了對精確動力學(xué)模型的依賴,能有效消除模型不確定性的影響。與單純采用離線訓(xùn)練構(gòu)造的神經(jīng)網(wǎng)絡(luò)相比,本方法結(jié)合貝葉斯濾波理論,對實時數(shù)據(jù)具有更強的適應(yīng)性。經(jīng)多次仿真實驗,證實該方法能夠有效控制預(yù)測誤差,具有較高精度。
1 引 言
現(xiàn)代戰(zhàn)爭中,出于人道主義和有效打擊的考量,精準(zhǔn)的點目標(biāo)打擊逐漸取代了大面積轟炸,如何實現(xiàn)精確制導(dǎo)成為各國學(xué)者關(guān)注的重點。雷達尋的導(dǎo)彈是精確制導(dǎo)武器的代表之一,它利用雷達導(dǎo)引頭獲得目標(biāo)的角度觀測,并結(jié)合制導(dǎo)律實現(xiàn)目標(biāo)跟蹤,進而精確打擊,這個角度觀測即為視線角(Line of Sight Angle,LOS)。 出于流線型的外形需求和防止氣流擾動影響天線測量結(jié)果的考慮,雷達導(dǎo)引頭并非直接暴露在導(dǎo)彈頭部,而是罩有一個保護裝置:導(dǎo)引頭天線罩(Antenna Radome)[1]。但是天線罩會影響電磁波的傳輸[2],使電磁信號發(fā)生衰減、折射和反射等效應(yīng),從而造成瞄準(zhǔn)線誤差,形成天線罩誤差角,這種測量誤差將降低有效導(dǎo)航比,增大脫靶量[3]。更嚴(yán)重的是,這使得彈體姿態(tài)耦合到導(dǎo)引頭,在制導(dǎo)回路內(nèi)部形成一條寄生回路,嚴(yán)重影響制導(dǎo)系統(tǒng)的穩(wěn)定性[4],加大了控制難度。
為避免天線罩誤差帶來的負面影響,最直接的思路是對天線罩進行精確建模,文獻[5]根據(jù)電磁波折射理論推導(dǎo)了波束指向偏移模型,創(chuàng)新地結(jié)合了相控陣天線陣列測角原理,成功定位了有天線罩時檢測角所對應(yīng)的最大波束指向角度,提升了檢測角誤差的準(zhǔn)確性,將誤差從1°降低到0.1°以下。 另一種思路是獲取天線罩誤差斜率估計,從而對天線罩誤差進行補償。常見的估計方法有傳統(tǒng)的非線性濾波估計、多模型算法和機器學(xué)習(xí)等。傳統(tǒng)的非線性濾波是對經(jīng)典的線性卡爾曼濾波(Kalman Filter,KF)的非線性變種,常見的有擴展卡爾曼濾波(Extended Kalman Filter,EKF)、無跡卡爾曼濾波(Unscented Kalman Filter,UKF)等。
文獻[6]利用擴展卡爾曼濾波方法,結(jié)合彈目相對運動和導(dǎo)引頭模型建立非線性濾波器,對天線罩斜率進行估計并用于補償,顯著改善了導(dǎo)彈的穩(wěn)定性和制導(dǎo)精度。文獻[7]則在此基礎(chǔ)上進行了三維模型下的濾波設(shè)計:縱側(cè)向通道聯(lián)合估計視線角速率和天線罩誤差斜率的擴展卡爾曼濾波器,進一步提高了天線罩誤差影響下的制導(dǎo)精度。文獻[8]提出了一種基于無跡卡爾曼濾波的隔離度在線補償方法,首先建立了包含天線罩誤差的雷達導(dǎo)引頭隔離度模型,運用該補償方法,在速度指向誤差和目標(biāo)常值機動輸入下均能估計出天線罩誤差斜率,從而改善了制導(dǎo)性能,提高了制導(dǎo)精度。
文獻[9]基于擴展卡爾曼濾波的方法通過建立雷達導(dǎo)引頭的寄生環(huán)模型,實現(xiàn)實時補償,提升導(dǎo)彈的穩(wěn)定性和制導(dǎo)精度,但是該方法也僅適用于能夠精確建模的情況。 利用多模型算法估計天線罩斜率的思路最早是由Yueh在文獻[10]中提出,其后有許多學(xué)者對該方法進行了進一步研究。例如,金鵬飛在文獻[11]中采用模型參考自適應(yīng)算法對天線罩誤差斜率進行在線估計,并針對算法中的參數(shù)選擇問題,提出了改進的參數(shù)自適應(yīng)調(diào)節(jié)律,實現(xiàn)了對天線罩誤差斜率準(zhǔn)確且快速的估計。
利用機器學(xué)習(xí)技術(shù)估計天線罩誤差,文獻[12]利用歷史數(shù)據(jù)訓(xùn)練神經(jīng)網(wǎng)絡(luò),實現(xiàn)了離線補償。文獻[13]提出了一種基于機器學(xué)習(xí)和修正物理光學(xué)方法的天線罩雷達截面計算方法。利用多層感知器(Multilayer Perceptron, MLP)模型估計了天線隨機系統(tǒng)的散射機理,用函數(shù)擬合估計FSS層的頻率響應(yīng)與入射角、偏振度和頻率的關(guān)系,從而提高了天線罩表面電流計算的精度,但是該方法完全依賴于歷史模式,缺乏對實時數(shù)據(jù)的適應(yīng)性。 除此之外,考慮到傳統(tǒng)非線性濾波對模型精確性的高要求和機器學(xué)習(xí)對訓(xùn)練集外、實際情況中不可預(yù)測噪聲的適應(yīng)性問題,近年來,傳統(tǒng)濾波與機器學(xué)習(xí)相結(jié)合的估計方法也被廣泛關(guān)注。文獻[14]提出一種基于粒子濾波(Particle Filter, PF)與長短期記憶網(wǎng)絡(luò)(Long Short Term Memory Network,LSTM)融合的在線預(yù)測方法。粒子濾波方法需要精確的狀態(tài)模型,而精確的轉(zhuǎn)移方程往往難以得到,文獻[14]利用歷史數(shù)據(jù)訓(xùn)練LSTM模型作為PF的狀態(tài)轉(zhuǎn)移方程,從而解決了PF的經(jīng)驗方程依賴問題,同時PF還能給出不確定性表達。研究結(jié)果表明,該方法模型更新簡單有效,預(yù)測精度好。
學(xué)習(xí)數(shù)據(jù)構(gòu)建神經(jīng)網(wǎng)絡(luò)模型并配合序貫濾波器進行估計,這一方法在很多其他學(xué)科中廣泛應(yīng)用,如文獻[15]融合長短期記憶神經(jīng)網(wǎng)絡(luò)與卡爾曼濾波,提出了一種混合模型KF-LSTM,其結(jié)果優(yōu)于LSTM模型和KF模型單獨使用的結(jié)果;文獻[16]中用多層前饋神經(jīng)網(wǎng)絡(luò)(Feedforward Neural Network,F(xiàn)NN)對測量建模,再通過卡爾曼濾波器進行估計,其結(jié)果更接近真實值;文獻[17]提出一種基于高階容積卡爾曼濾波(High Order Cubature Kalman Filter,HCKF)和神經(jīng)網(wǎng)絡(luò)的狀態(tài)估計算法,利用前饋神經(jīng)網(wǎng)絡(luò)建立狀態(tài)空間模型,然后采用HCKF對新狀態(tài)進行更新,從而實現(xiàn)對狀態(tài)值的精確估計。為了使?fàn)顟B(tài)方程更好地預(yù)測狀態(tài)變量的走向,文獻[18]利用循環(huán)神經(jīng)網(wǎng)絡(luò)(Recurrent Neural Network,RNN)學(xué)習(xí)歷史數(shù)據(jù),對狀態(tài)進行建模,在此基礎(chǔ)上,利用集合卡爾曼濾波(Ensemble Kalman Filtering)進行反演,得到的結(jié)果更為精確,實現(xiàn)聲速剖面波動的追蹤。
綜上所述,只應(yīng)用傳統(tǒng)非線性濾波技術(shù)進行估計的方法(如文獻[6-9]),可以根據(jù)系統(tǒng)觀測適應(yīng)實時情況,但其估計精度完全依賴于動力學(xué)模型的準(zhǔn)確性,僅適用于能夠精確建模的情況。而僅使用離線訓(xùn)練構(gòu)造的神經(jīng)網(wǎng)絡(luò)的估計方法(如文獻[12-13]),從歷史數(shù)據(jù)中學(xué)習(xí)模式,缺乏對實時數(shù)據(jù)的適應(yīng)性。故本文參考文獻[14-18]的思想,綜合傳統(tǒng)非線性濾波技術(shù)和神經(jīng)網(wǎng)絡(luò)的優(yōu)點,提出一種基于神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波的估計方法。 本文針對二維彈目相對運動模型中存在狀態(tài)方程部分未知的情況,提出利用神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)歷史數(shù)據(jù)建立狀態(tài)轉(zhuǎn)移方程,再結(jié)合無跡卡爾曼濾波進行狀態(tài)的實時更新,從而得到天線罩誤差斜率估計,是一種融合機器學(xué)習(xí)和傳統(tǒng)非線性濾波方法的天線罩誤差斜率估計方法。
2 系統(tǒng)建模
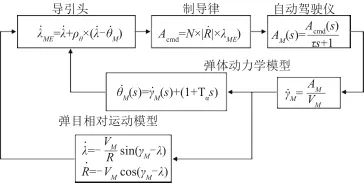
導(dǎo)彈制導(dǎo)控制系統(tǒng)的建模主要包括導(dǎo)引頭、比例導(dǎo)引、自動駕駛儀、彈體動力學(xué)環(huán)節(jié)和彈目相對運動五個部分。如圖1所示, 為真實視線角,
為真實視線角, 為視線角觀測值,
為視線角觀測值, 為天線罩誤差斜率,
為天線罩誤差斜率, 表示比例導(dǎo)引系數(shù),
表示比例導(dǎo)引系數(shù), 為導(dǎo)彈速度,
為導(dǎo)彈速度, 是制導(dǎo)律產(chǎn)生的控制指令,
是制導(dǎo)律產(chǎn)生的控制指令, 是彈體俯仰角。其中,
是彈體俯仰角。其中, 是視線角速度中的耦合分量。這個分量使得彈體姿態(tài)耦合到導(dǎo)引頭中,在制導(dǎo)回路內(nèi)部生成一條寄生回路。指令加速度由理想的
是視線角速度中的耦合分量。這個分量使得彈體姿態(tài)耦合到導(dǎo)引頭中,在制導(dǎo)回路內(nèi)部生成一條寄生回路。指令加速度由理想的 變?yōu)?/p>
變?yōu)?/p>
▲ 圖1 制導(dǎo)控制系統(tǒng)▲ Fig.1 Guidance control system
 (1)
(1)
式(1)中,姿態(tài)角速度也參與到指令加速度的生成,形成了姿態(tài)角速率反饋回路。誤差斜率為負時,將導(dǎo)致姿態(tài)角速度正反饋,使姿態(tài)穩(wěn)定回路發(fā)散;而當(dāng)為正時,會降低導(dǎo)彈有效導(dǎo)航比,導(dǎo)致響應(yīng)緩慢,造成較大的脫靶量。 綜上所述,天線罩誤差的存在破壞了原有的控制結(jié)構(gòu),嚴(yán)重影響了制導(dǎo)控制系統(tǒng)的穩(wěn)定性和制導(dǎo)精度。
2.1 導(dǎo)引頭
雷達波穿過天線罩會發(fā)生折射,此時根據(jù)導(dǎo)引頭觀測得到的視在目標(biāo)位置不是真實的目標(biāo)位置,如圖2所示,在真實視線和虛假視線之間存在一個誤差角,記作 ,即天線罩誤差角。
,即天線罩誤差角。
▲ 圖2 帶天線罩的導(dǎo)引頭示意圖▲ Fig.2 Seeker with radome 對于不同的視角 ,由于雷達波穿過天線罩罩壁位置的不同,折射情況不同,天線罩誤差也就不同,天線罩誤差一般為視角的函數(shù)。文獻[19]中給出天線罩瞄準(zhǔn)誤差的經(jīng)驗公式:
,由于雷達波穿過天線罩罩壁位置的不同,折射情況不同,天線罩誤差也就不同,天線罩誤差一般為視角的函數(shù)。文獻[19]中給出天線罩瞄準(zhǔn)誤差的經(jīng)驗公式:
 (2)
(2)
式中, 為天線罩瞄準(zhǔn)誤差的最大幅值,
為天線罩瞄準(zhǔn)誤差的最大幅值, 為一個正常數(shù),
為一個正常數(shù), 為周期。本文中取
為周期。本文中取 ,
, ,
, ,此時天線罩誤差隨視角變化曲線如圖3所示。
,此時天線罩誤差隨視角變化曲線如圖3所示。
▲ 圖3 天線罩誤差隨視角變化曲線▲ Fig.3 Radome error curve with angle of view 對式(2)求導(dǎo),得到天線罩誤差斜率的經(jīng)驗公式:
 (3)
(3)
天線罩誤差影響下二維彈目幾何關(guān)系如圖4所示,真實視線和參考方向的夾角為真實彈目視線角,真實視線與虛假視線的夾角為天線罩誤差角,彈體縱軸和參考方向的夾角為彈體姿態(tài)角,彈體縱軸與導(dǎo)彈速度的夾角 為導(dǎo)彈攻角,導(dǎo)彈速度與參考方向的夾角
為導(dǎo)彈攻角,導(dǎo)彈速度與參考方向的夾角 為航跡角,那么視角
為航跡角,那么視角 可以表示為
可以表示為
 (4)
(4)
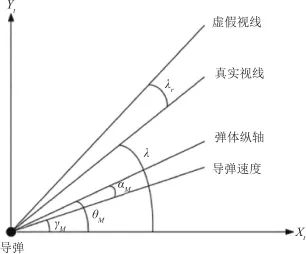
▲ 圖4 天線罩誤差影響下彈目幾何關(guān)系▲ Fig.4 Geometric relations of projectiles affected by radome Errors 相應(yīng)地,實際測量的彈目視線角可以表示為
 (5)
(5)
式(2)中,天線罩誤差是視角的非線性函數(shù),對天線罩誤差在視角為0處作泰勒展開,當(dāng)視角在較小范圍內(nèi)變化時,利用中值定理余項,實測彈目視線角可進一步表示為
 (6)
(6)
2.2 彈目相對運動
本文針對固定目標(biāo)制導(dǎo)過程中的天線罩誤差估計問題進行研究,假設(shè)目標(biāo)靜止,建立二維目標(biāo)接近運動關(guān)系。如圖5所示, 為彈體坐標(biāo)系,
為彈體坐標(biāo)系, ,分別為導(dǎo)彈機動加速度和導(dǎo)彈速度,導(dǎo)彈速度與參考方向的夾角為航跡角,為真實彈目視線角,R為彈目距離。
,分別為導(dǎo)彈機動加速度和導(dǎo)彈速度,導(dǎo)彈速度與參考方向的夾角為航跡角,為真實彈目視線角,R為彈目距離。
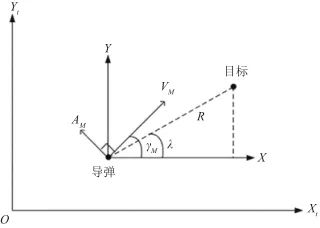
▲ 圖5 彈目相對運動示意圖▲ Fig.5 Projectile relative motion 假設(shè)目標(biāo)的速度是常數(shù),導(dǎo)彈和目標(biāo)之間的相對運動建模如式(7)和式(8),相應(yīng)的Simulink仿真模型如圖6所示。
 (7)
(7)
 (8)
(8)
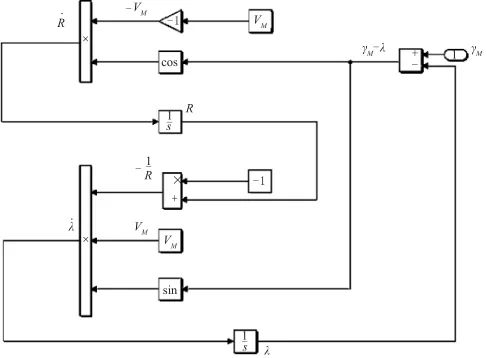
▲ 圖6 彈目相對運動仿真模型▲ Fig.6 Simulation model of projectile relative motion
2.3 導(dǎo)引控制
比例導(dǎo)引律( 是應(yīng)用最為廣泛的導(dǎo)引方法之一,其基本思想是使導(dǎo)彈速度向量的轉(zhuǎn)動角速度正比于目標(biāo)視線的轉(zhuǎn)動角速度,它能使導(dǎo)彈在目標(biāo)機動時也能很好地實施攻擊。 根據(jù)PNG制導(dǎo)律,利用量測得到的彈目視線角得到控制指令:
是應(yīng)用最為廣泛的導(dǎo)引方法之一,其基本思想是使導(dǎo)彈速度向量的轉(zhuǎn)動角速度正比于目標(biāo)視線的轉(zhuǎn)動角速度,它能使導(dǎo)彈在目標(biāo)機動時也能很好地實施攻擊。 根據(jù)PNG制導(dǎo)律,利用量測得到的彈目視線角得到控制指令:
 (9)
(9)
式中,表示比例導(dǎo)引系數(shù), 為彈目接近速度,根據(jù)式(6),可以推算得到視線角速度
為彈目接近速度,根據(jù)式(6),可以推算得到視線角速度 :
:
 (10)
(10)
代入式(7)得
 (11)
(11)
2.4 自動駕駛儀
假設(shè)自動駕駛儀為一階延時環(huán)節(jié),時間常數(shù)為 ,則環(huán)節(jié)傳遞函數(shù)為
,則環(huán)節(jié)傳遞函數(shù)為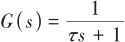 。輸入為制導(dǎo)控制模塊輸出的制導(dǎo)指令,輸出為實際控制指令
。輸入為制導(dǎo)控制模塊輸出的制導(dǎo)指令,輸出為實際控制指令 。
。
2.5 彈體動力學(xué)模型
彈體動力學(xué)模型即機動控制對彈體運動學(xué)物理量的作用方程。這里推導(dǎo)從控制指令到導(dǎo)彈姿態(tài)角(俯仰角)速率 的傳遞函數(shù)。 首先,機動加速度正交于導(dǎo)彈速度,可得航跡角速率
的傳遞函數(shù)。 首先,機動加速度正交于導(dǎo)彈速度,可得航跡角速率 :
:
 (12)
(12)
彈體姿態(tài)角 是彈體縱軸和參考方向的夾角,由圖4可知,可以表示為
是彈體縱軸和參考方向的夾角,由圖4可知,可以表示為
 (13)
(13)
導(dǎo)彈機動性參數(shù)中的轉(zhuǎn)彎率時間常數(shù) 的定義如下:
的定義如下:
 (14)
(14)
代入(13)得
 (15)
(15)
對式(15)求導(dǎo)得到姿態(tài)角速率:
 (16)
(16)
對式(16)進行拉普拉斯變換最終得到彈體動力學(xué)模型:
 (17)
(17)
2.6 完整的系統(tǒng)建模
考慮比例導(dǎo)引的帶誤差雷達尋的制導(dǎo)系統(tǒng)建模如圖7所示,包括視線角量測、導(dǎo)引控制、自動駕駛儀模塊和彈目相對運動、機體動力學(xué)等模塊,至此仿真模型建立完畢。
▲ 圖7 考慮比例導(dǎo)引的帶誤差雷達尋的制導(dǎo)系統(tǒng)▲ Fig.7 Radar homing guidance system with error considering proportional guidance 將導(dǎo)彈速度和比例導(dǎo)引系數(shù)設(shè)為常數(shù),取真實視線角、視角和天線罩誤差斜率作為3個狀態(tài)變量,以視線角觀測值為觀測量,分別建立系統(tǒng)的狀態(tài)模型和觀測模型。本節(jié)先根據(jù)幾何關(guān)系建立觀測模型,隨后將利用神經(jīng)網(wǎng)絡(luò)建立狀態(tài)轉(zhuǎn)移模型。 令 ,根據(jù)式(4)和式(6),觀測方程可寫成:
,根據(jù)式(4)和式(6),觀測方程可寫成:
 (18)
(18)
3 基于神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波融合的天線罩誤差斜率估計方法
3.1 神經(jīng)網(wǎng)絡(luò)預(yù)測
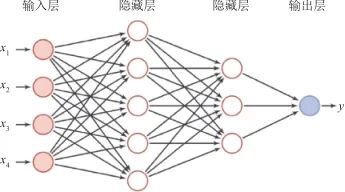
神經(jīng)網(wǎng)絡(luò),也稱為人工神經(jīng)網(wǎng)絡(luò) (Artificial Neural Networks,ANN),是一種模仿動物神經(jīng)網(wǎng)絡(luò)行為特征,進行分布式并行信息處理的算法數(shù)學(xué)模型。其模型結(jié)構(gòu)大體可以分為前饋型網(wǎng)絡(luò)和反饋型網(wǎng)絡(luò)(也稱為Hopfield網(wǎng)絡(luò))兩大類。本文采用多層前饋神經(jīng)網(wǎng)絡(luò)擬合狀態(tài)預(yù)測方程。 前饋神經(jīng)網(wǎng)絡(luò)[20](Feedforward Neural Network,F(xiàn)NN),簡稱前饋網(wǎng)絡(luò),是一種最簡單的神經(jīng)網(wǎng)絡(luò),在各行各業(yè)中應(yīng)用廣泛。 前饋神經(jīng)網(wǎng)絡(luò)采用一種單向多層結(jié)構(gòu),其中每一層包含若干個神經(jīng)元,各神經(jīng)元可以接收前一層神經(jīng)元的信號,并產(chǎn)生輸出到下一層。其中,第0層為輸入層,最后一層為輸出層,其他中間層叫做隱藏層(或隱含層),隱藏層可以是一層,也可以是多層。 前饋神經(jīng)網(wǎng)絡(luò)中無反饋,信號從輸入層向輸出層單向傳播。一個典型的多層前饋神經(jīng)網(wǎng)絡(luò)如圖8所示,該神經(jīng)網(wǎng)絡(luò)模型共有4層,分別為輸入層、2層隱藏層和輸出層,各個層之間通過權(quán)系數(shù)進行連接,輸入輸出層在兩端,中間隱藏層的節(jié)點數(shù)根據(jù)實際情況進行選取。
▲ 圖8 前饋神經(jīng)網(wǎng)絡(luò)▲ Fig.8 Feedforward neural network 與傳統(tǒng)的解析建模相比,神經(jīng)網(wǎng)絡(luò)模型可以更好地利用數(shù)據(jù),直接學(xué)習(xí)到映射關(guān)系,而不需要進行復(fù)雜的分析和推導(dǎo),避免了人工推導(dǎo)可能出現(xiàn)的錯誤。另外,對于模型過于復(fù)雜或者模式未知的系統(tǒng),神經(jīng)網(wǎng)絡(luò)也可以進行擬合。 因此,本文使用基于前饋神經(jīng)網(wǎng)絡(luò)的狀態(tài)預(yù)測網(wǎng)絡(luò)模型,輸入為一段時間內(nèi)狀態(tài)序列,輸出為整體后移一個時刻的狀態(tài)序列。 網(wǎng)絡(luò)模型結(jié)構(gòu)如圖9所示,網(wǎng)絡(luò)主體由2層節(jié)點數(shù)為16的Dense層構(gòu)成,輸出層為節(jié)點數(shù)為3的全連接層。網(wǎng)絡(luò)訓(xùn)練指標(biāo)為均方誤差(最小),優(yōu)化器為Adam優(yōu)化器。
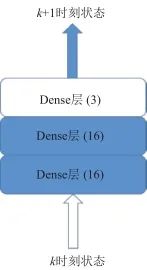
▲ 圖9 網(wǎng)絡(luò)模型▲ Fig.9 Network framework
3.2 無跡卡爾曼濾波
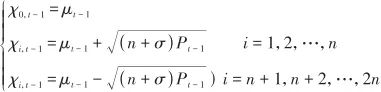
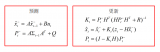
無跡卡爾曼濾波的核心是無跡變換(Unscented Transform,UT),其主要思想是先產(chǎn)生一組一、二階矩與狀態(tài)變量的信息相同的Sigma點,然后對每個Sigma點進行非線性函數(shù)變換,最后用變換后的Sigma點集來確定輸出值的矩。UKF算法的預(yù)測步計算均是非線性的,可以避免線性化過程中產(chǎn)生的誤差,提高估算的準(zhǔn)確性。 UKF的具體流程為 (1)初始化狀態(tài) 的初始均值
的初始均值 和協(xié)方差
和協(xié)方差 。 (2)計算對應(yīng)的Sigma點集:
。 (2)計算對應(yīng)的Sigma點集:
 (19)
(19)
式中,n為狀態(tài)變量個數(shù),這里為3;σ為一個與n有關(guān)的系數(shù)。 (3)計算加權(quán)系數(shù):
 (20)
(20)
(4)預(yù)測步:
 (21)
(21)
 (22)
(22)
 (23)
(23)
式中, 是過程噪聲協(xié)方差。 (5)觀測:
是過程噪聲協(xié)方差。 (5)觀測:
 (24)
(24)
 (25)
(25)
 (26)
(26)
式中, 為測量噪聲協(xié)方差。 (6)卡爾曼增益:
為測量噪聲協(xié)方差。 (6)卡爾曼增益:
 (27)
(27)
(7)更新結(jié)果:
 (28)
(28)
 (29)
(29)
3.3 基于神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波融合的估計方法
在本文研究的天線罩模型中,存在狀態(tài)方程部分未知的情況,這里利用神經(jīng)網(wǎng)絡(luò)基于歷史數(shù)據(jù)學(xué)習(xí)到完整狀態(tài)方程,再應(yīng)用無跡卡爾曼濾波,結(jié)合實時觀測得到狀態(tài)估計。該估計方法的流程示意圖如圖10所示,用預(yù)先訓(xùn)練好權(quán)重的前饋神經(jīng)網(wǎng)絡(luò)作為無跡卡爾曼濾波的預(yù)測方程f。
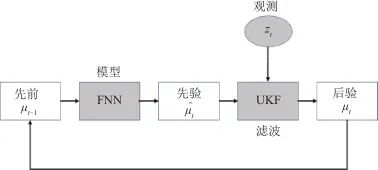
▲ 圖10 基于神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波融合的估計方法流程▲ Fig.10 Method based on neural network and unscented Kalman filter UT變換得到Sigma點集后,計算預(yù)測步如下:
 (30)
(30)
結(jié)合加權(quán)系數(shù)得到預(yù)測步的均值和方差。隨后的觀測更新步與3.2節(jié)相關(guān)內(nèi)容相同,用導(dǎo)引頭觀測值更新狀態(tài)估計,從而得到t時刻最終的估計結(jié)果:
 (31)
(31)
 (32)
(32)
然后利用這個估計結(jié)果進行下一時刻的狀態(tài)預(yù)測,迭代計算得到完整的狀態(tài)估計序列。
4 仿真結(jié)果及分析
因為本文解決的實際問題存在狀態(tài)方程部分未知的情況,只使用傳統(tǒng)非線性濾波技術(shù)無法完成估計,這里僅與完全依賴歷史數(shù)據(jù)的神經(jīng)網(wǎng)絡(luò)估計方法設(shè)計對比實驗。 考慮到卡爾曼濾波及其變種都是基于馬爾可夫模型,且兼顧實際模型本身的時序特性,僅利用神經(jīng)網(wǎng)絡(luò)技術(shù)和本文提出的估計方法都采用時序的輸入輸出進行網(wǎng)絡(luò)訓(xùn)練。

▲ 圖11 神經(jīng)網(wǎng)絡(luò)序列訓(xùn)練與測試示意▲ Fig.11 Training and testing of FNN 具體地,僅用神經(jīng)網(wǎng)絡(luò)的估計方法的訓(xùn)練集輸入為當(dāng)前觀測,輸出為狀態(tài)變量。而本文方法采用的訓(xùn)練集,以輸入為 、輸出為
、輸出為 為例,時間上向后預(yù)測一步。 本文取序列長度為2生成訓(xùn)練集訓(xùn)練模型,然后用較長的完整序列進行測試。 設(shè)計64組狀態(tài)初值正態(tài)分布的訓(xùn)練集,狀態(tài)初值如表1所示。
為例,時間上向后預(yù)測一步。 本文取序列長度為2生成訓(xùn)練集訓(xùn)練模型,然后用較長的完整序列進行測試。 設(shè)計64組狀態(tài)初值正態(tài)分布的訓(xùn)練集,狀態(tài)初值如表1所示。
▼ 表1 訓(xùn)練集初值設(shè)定▼ Table 1 Initial value of training set

設(shè)采樣時間為0.1 s,運行30 s,生成長度為300的序列,分別將上述長序列分割為298個長度為2的短序列,并打亂小序列間順序。按不同初值情況,重復(fù)以上步驟64次,并再次打亂,生成包含19072條短序列的數(shù)據(jù)集。設(shè)驗證集比例為10%,測試集比例為10%,最終隨機取1908條序列為驗證集,1907條序列為測試集,剩余80%的15257條短序列為訓(xùn)練集。對訓(xùn)練數(shù)據(jù)的各維度分別進行最大最小值歸一化,即:
 (33)
(33)
測試序列的初值如表2所示,長度為300。
▼ 表2 測試序列初值設(shè)定▼ Table 2 Initial value of test sequence

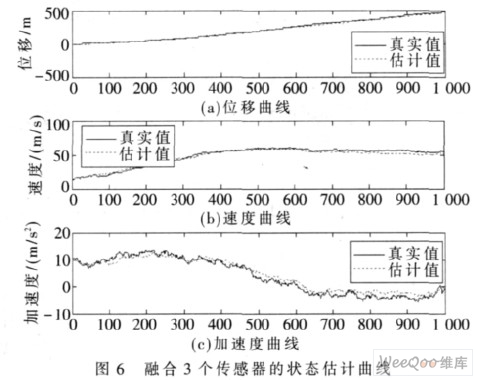
僅用神經(jīng)網(wǎng)絡(luò)估計的狀態(tài)曲線如圖12所示,其中,圖12(a)為狀態(tài)的估計值和實際值對比,粗實線表示神經(jīng)網(wǎng)絡(luò)方法估計所得,細實線表示實際狀態(tài),可見估計的狀態(tài)與實際狀態(tài)偏差較大;圖12(b)為3個狀態(tài)估計值和實際值的誤差曲線。
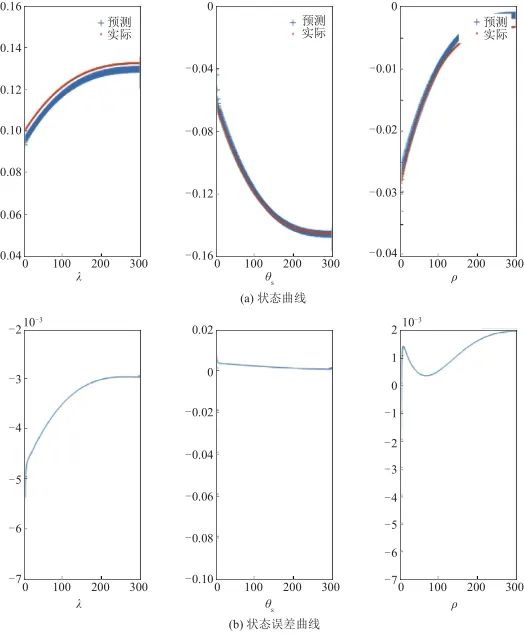
▲ 圖12 僅用神經(jīng)網(wǎng)絡(luò)的狀態(tài)測試結(jié)果▲ Fig.12 State testing results of neural network 經(jīng)神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波融合的估計方法得到的狀態(tài)曲線如圖13所示,其中,圖13(a)為狀態(tài)的估計值和實際值對比,粗線表示本文方法估計所得,細線表示實際狀態(tài),可見估計的狀態(tài)與實際狀態(tài)較為接近;圖13(b)為3個狀態(tài)估計值和實際值的誤差曲線。
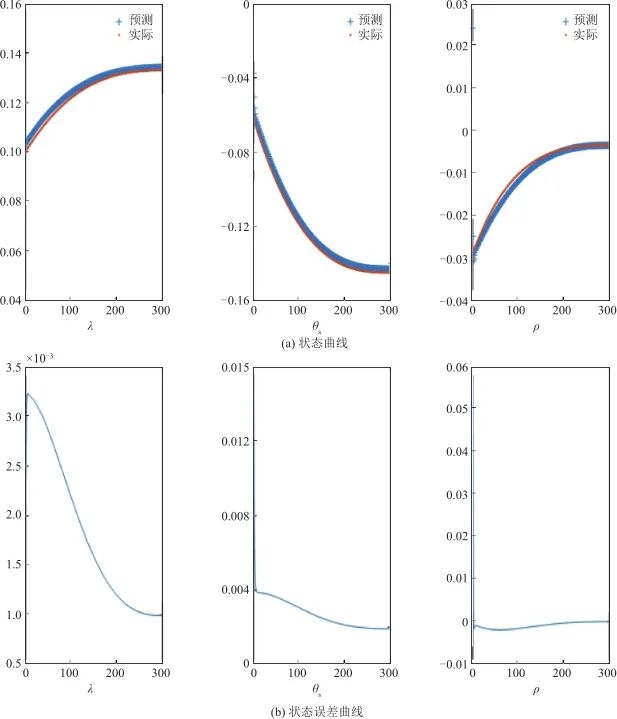
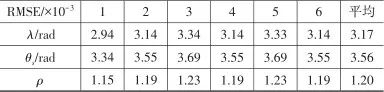
▲ 圖13 本文方法狀態(tài)測試結(jié)果▲ Fig.13 State testing results of the method 對比可見,本文提出的結(jié)合使用傳統(tǒng)非線性濾波技術(shù)和神經(jīng)網(wǎng)絡(luò)的方法,估計準(zhǔn)確度更高。 分別取多組隨機初值重復(fù)實驗,僅采用神經(jīng)網(wǎng)絡(luò)的估計方法和本文方法的估計誤差(這里用均方根誤差RMSE表示)分別如表3和表4所示,其中單純采用神經(jīng)網(wǎng)絡(luò)的方法得到的天線罩誤差斜率估計平均RMSE為 ,本文天線罩誤差斜率估計的平均RMSE更低,為
,本文天線罩誤差斜率估計的平均RMSE更低,為 。
。
▼ 表3 神經(jīng)網(wǎng)絡(luò)實驗結(jié)果▼ Table 3 Experimental results of the neural network
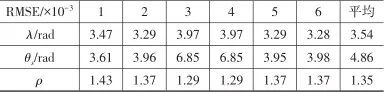
▼ 表4 本文方法實驗結(jié)果▼ Table 4 Experimental results of the method
5 結(jié) 論
針對導(dǎo)引頭天線罩誤差問題,本文首先介紹了該誤差對制導(dǎo)系統(tǒng)的穩(wěn)定性和精度造成的負面影響,然后以估計天線罩誤差斜率為目標(biāo),提出了一種融合神經(jīng)網(wǎng)絡(luò)和無跡卡爾曼濾波的天線罩誤差斜率估計方法。分別以真實視線角、視角和天線罩誤差斜率為狀態(tài)變量,視線角為觀測變量,建立非線性濾波模型,其中,預(yù)測函數(shù)用預(yù)先訓(xùn)練完成的多層前饋神經(jīng)網(wǎng)絡(luò)代替,迭代過程中利用觀測實時更新狀態(tài),從而獲得精度較高的狀態(tài)估計。本方法無參數(shù)選擇需求,易于工程實現(xiàn),且對現(xiàn)實數(shù)據(jù)具有更好的適應(yīng)性。經(jīng)多次仿真實驗,證實該方法能夠有效控制預(yù)測誤差,具有較高精度。
編輯:黃飛
?















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論