 卡爾曼濾波基礎知識
卡爾曼濾波基礎知識

附錄:補充材料
附1、卡爾曼濾波主要框架?
卡爾曼濾波的本質屬于系統的最優估計,通過卡爾曼增益來修正狀態預測值,減小噪聲信號對測試精度的影響,其核心內容是基于上一時刻狀態的估計值以及當前狀態的觀測值,給出當前狀態的最優估計,該算法涉及的核心方程有:
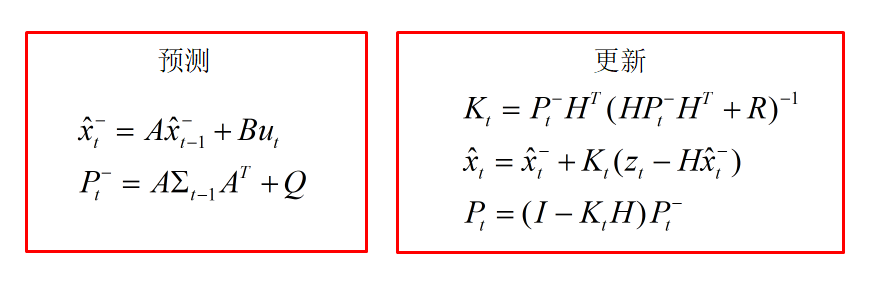
其中,xt為系統狀態矩陣;zt為系統觀測矩陣(實驗結果);A為狀態轉移矩陣;B為控制輸入矩陣;H為狀態觀測矩陣。
附2、卡爾曼濾波應用實例?
本部分通過簡單的算例,介紹了卡爾曼濾波的應用場景,后續針對課題組實際需求,編寫了能夠應用于大應變傳感器的濾波程序,具體如下所示:
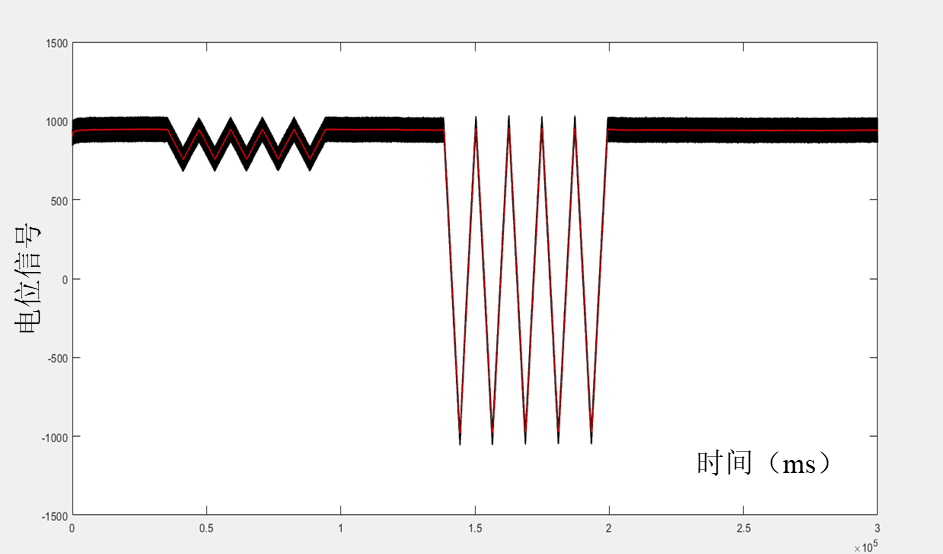
上圖中黑線表述為信號采集系統得到的原始信號,紅線表述為卡爾曼濾波后展現的信號特征;從圖中可以看出,卡爾曼濾波能夠有效地減小測量誤差;其中,狀態轉換矩陣A=1,具體物理意義為:傳感器輸出信號只與應變量相關,不施加外界激勵時,輸出信號不發生改變;狀態觀測矩陣H=1,具體物理意義為:傳感器輸出的信號能夠直接測量;
具體使用的源程序代碼如下:
clear all;clc
%先對不同變量進行定義
% Q為過程激勵噪聲協方差
% R為觀測噪聲協方差
% X_bar為先驗證估計
% Xbar為后驗估計,最優估計值
% P_為先驗估計誤差協方差
% P為后驗估計誤差協方差
% Z為測量結果,測量數據(實驗結果)
% K為卡爾曼增益
% 核心代碼
% 讀取傳感器輸出信號
node='信號采集結果.txt';
[x,Z]...
=textread(node,'%f%f','emptyvalue',0,'headerlines',10);
% 定義超參數:實驗數據長度,過程激勵噪聲協方差,觀測噪聲協方差(測量設備性能參數)
changdu=length(Z);
Q=0.04;
R=100.25;
% 定義尺寸參數
cicun=[changdu,1];
% 實驗數據
% Z=24+sqrt(R)*randn(cicun);
% 定義初始迭代參數
X_bar=zeros(cicun);
Xbar=zeros(cicun);
K=zeros(cicun);
P_=zeros(cicun);
P=zeros(cicun);
P(1)=1;
Xbar(1)=900.3;
% 卡爾曼濾波參數更新
for n=2:changdu
% 更新先驗估計
X_bar(n)=Xbar(n-1);
% 更新先驗估計誤差協方差
P_(n)=P(n-1)+Q;
% 狀態更新
K(n)=P_(n)/(P_(n)+R);
Xbar(n)=X_bar(n)+K(n)*(Z(n)-X_bar(n));
P(n)=(1-K(n))*P_(n);
end
% 繪圖
plot(Z,'K+')
hold on
plot(Xbar,'r-')
holdon
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
源程序
+關注
關注
63文章
1694瀏覽量
48228 -
卡爾曼濾波
+關注
關注
3文章
167瀏覽量
25461
原文標題:卡爾曼濾波
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦

擴展卡爾曼濾波的原理
在很多實際工程問題當中,非線性系統占大多數,而卡爾曼提出來的卡爾曼濾波器是一種針對線性系統的估計算法[1]。 為了解決這一問題,Schmid

卡爾曼濾波(KF)與擴展卡爾曼(EKF)
卡爾曼濾波是一種高效率的遞歸濾波器(自回歸濾波器), 它能夠從一系列的不完全包含噪聲的測量(英文:measurement)中,估計動態系統的
發表于 05-10 17:51
?6次下載


卡爾曼濾波在圖像處理中的應用實例 如何調優卡爾曼濾波參數
卡爾曼濾波在圖像處理中的應用實例 卡爾曼濾波在圖像處理中主要應用于目標跟蹤、噪聲消除和圖像恢復等



 工商網監
工商網監
評論