卡爾曼濾波是通過對下一時刻系統的狀態估計以及測量得出的反饋相結合,最終得到該時刻較為準確的的狀態估計(預測+測量反饋),我們一般所說的卡爾曼濾波KF是針對線性系統的,其思想對于非線性系統也是適應的,由此延伸出來的有EKF,UKF等。
2023-07-14 11:46:50 1476
1476 
卡爾曼濾波(KalmanFilter)是一種遞歸的、自適應的濾波算法,廣泛應用于估計系統狀態和觀測過程中的噪聲。它最初在1960年被提出,被認為是控制理論和信號處理領域中最重要的發展之一。卡爾曼
2023-12-07 08:08:404773 
現在有了一個新的疑惑是:是否需要對傳感器數據進行預處理,消除抖動與干擾后再利用卡爾曼和互補等方法濾波融合數據么?找到了一個效果對比這個視頻對比了互補濾波,卡爾曼,擴展卡爾曼的效果左邊綠色的是互補,中間
2015-06-11 16:02:41
本文基于四軸飛行器的數學模型,研究擴展卡爾曼濾波( Extended Kalman Filter, EKF) 和不敏卡爾曼濾波(Unscented Kalman Filter,UKF)兩種非線性濾波
2021-05-13 06:06:01
以下是擴展卡爾曼濾波和無味卡爾曼濾波對直線x=2*k+2進行濾波,怎么改狀態方程和傳遞矩陣,跪求大神指導,謝謝了。% EKF UKF算法clear;x = 0.1; % 初始狀態
2017-04-03 17:57:17
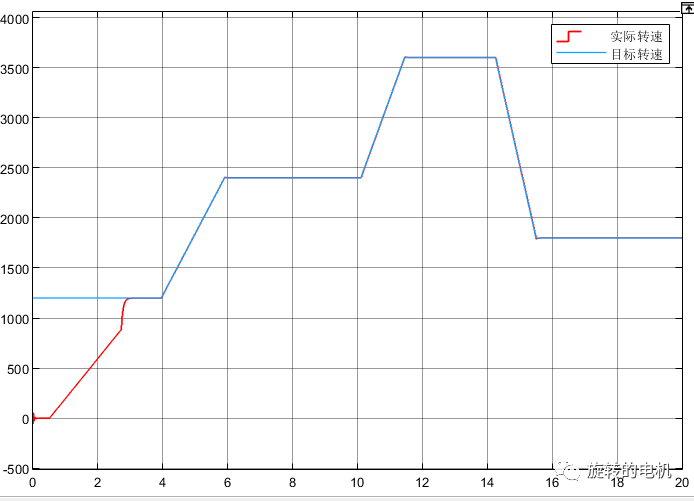
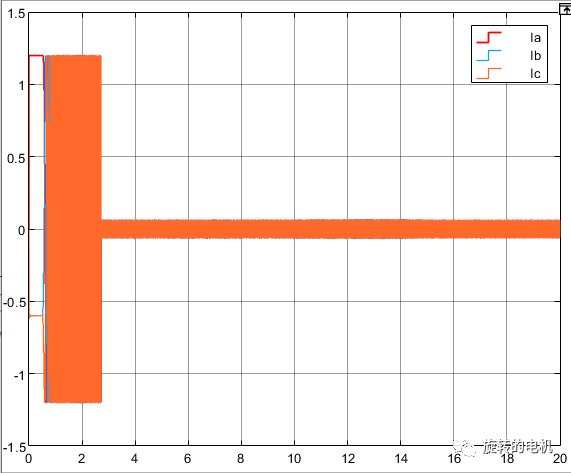
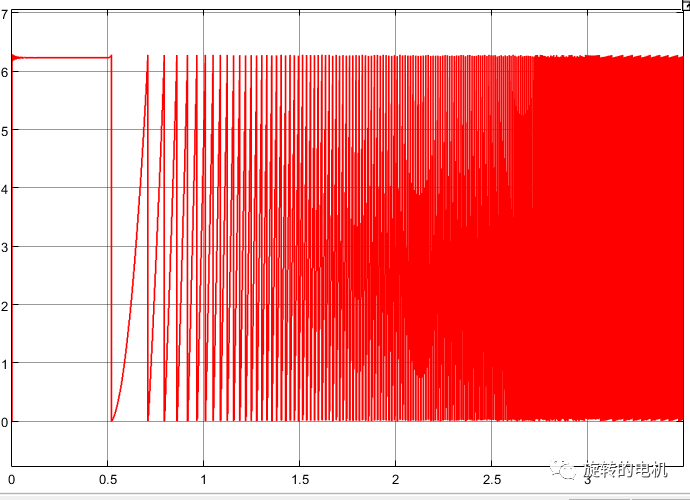
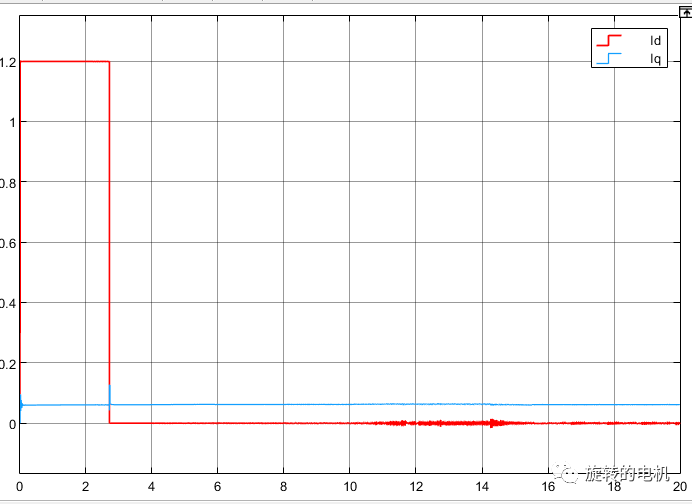
摘要: 基于Matlab/Simulink,本文設計了一個無刷直流電機的控制方案,詳細闡述了無刷直流電機的運行原理,并用Matlab/Simulink對其進行了仿真。實驗證明,用Matlab
2021-07-05 07:22:46
卡爾曼濾波的估計值能很好的逼近真實值,我的疑惑是,這和濾波有什么關系,請高手介紹下卡爾曼算法是如何濾波的?
2013-07-04 22:57:04
a往南向北 2019-01-16 20:39:20 11340 收藏 111分類專欄: C語言嵌入式 文章標簽: 卡爾曼濾波 C代碼卡爾曼濾波理論很容易就可以在MATLAB軟件環境下實現,但是,實際
2021-08-17 09:10:43
切性質。這篇文章介紹了離散卡爾曼理論和實用方法,包括卡爾曼濾波器及其衍生:擴展卡爾曼濾波器的描述和討論,并給出了一個相對簡單的帶圖實例。
2008-07-14 13:06:49
[開發工具] STM32算法的翅膀之MATLAB基于加速度計與氣壓計的三階卡爾曼濾波計算加速度、速度及高度主要介紹了卡爾曼濾波器的使用原理,給出了matlab代碼,并在STM32F407平臺對卡爾曼濾波器進行了驗證,傳感器為MPU6050與DPS310,測試結果令人滿意,速度與高度無累積...
2021-08-17 07:02:07
卡爾曼濾波風力發電機中的風速估計,轉速估計甚至扭矩估計都設計到卡爾曼濾波,如果只是單一傳感變量的平滑處理也能用到卡爾曼濾波。振動信號中的濾波大多采用低通去除高頻噪音,而卡爾曼濾波則是通過不確定度把
2021-07-12 06:00:47
機器人導航,控制,傳感器數據融合甚至在軍事方面的雷達系統以及導彈追蹤等等。近年來更被應用于計算機圖像處理,例如頭臉識別,圖像分割,圖像邊緣檢測等等。2.卡爾曼濾波器的介紹(Introduction
2016-09-21 11:41:07
在這里我就不介紹卡爾曼的數學推算了,網上的數學推導一抓一大把,如果想了解推導過程的小伙伴可以去大佬的博客。如果你是想直接簡單運用卡爾曼濾波來處理mpu6050的數據,或者是處理ADC的數據,那么我
2022-02-28 14:24:57
已知測量值和原始值,但測量噪聲和觀測噪聲未知,如何進行卡爾曼濾波。之前看了好像可以用自適應卡爾曼,但不是很懂,求例子,最好有注釋的
2017-03-23 19:12:17
擴展卡爾曼濾波matlabTDOA/AOA定位的擴展卡爾曼濾波定位算法Matlab源碼function [MX,MY,SS]=ExtendedKalmanFilter(D1,D2,D3,A1,A2
2008-07-14 16:01:18
摘要:超前或滯后換相會造成無刷直流電機(BLDCM)輸出轉矩的減小和系統效率的降低。以平均電磁轉矩最大化為目標,提出了一種基于擴展卡爾曼濾波算法的無刷直流電機最佳換相時刻估算方法。該方法建立了平均
2025-07-10 16:41:57
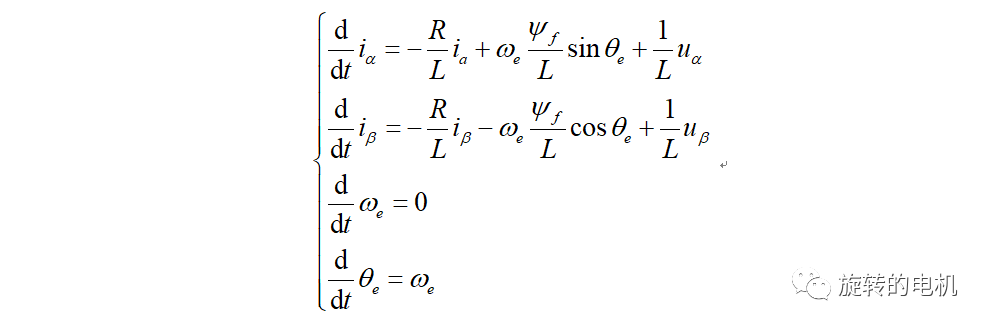
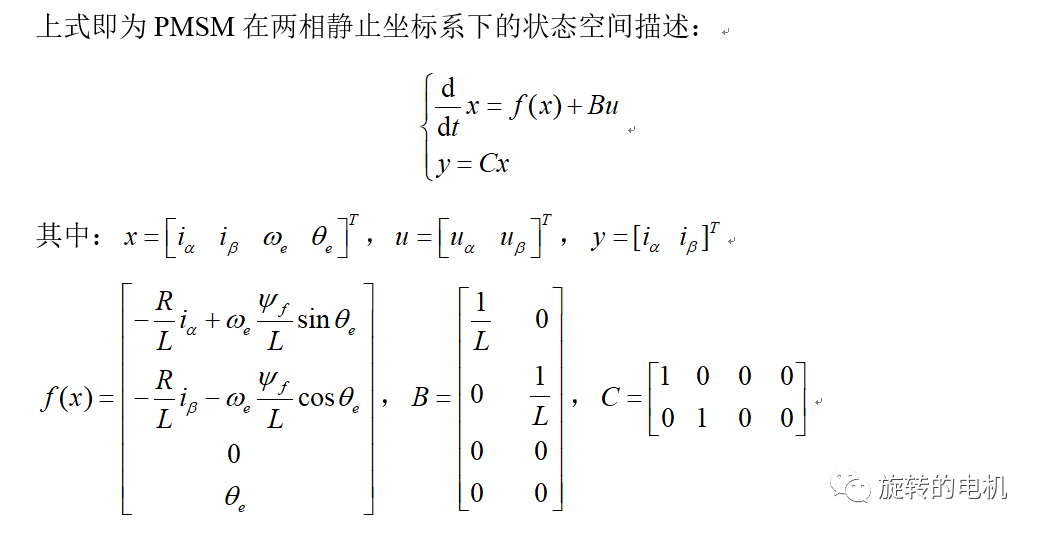
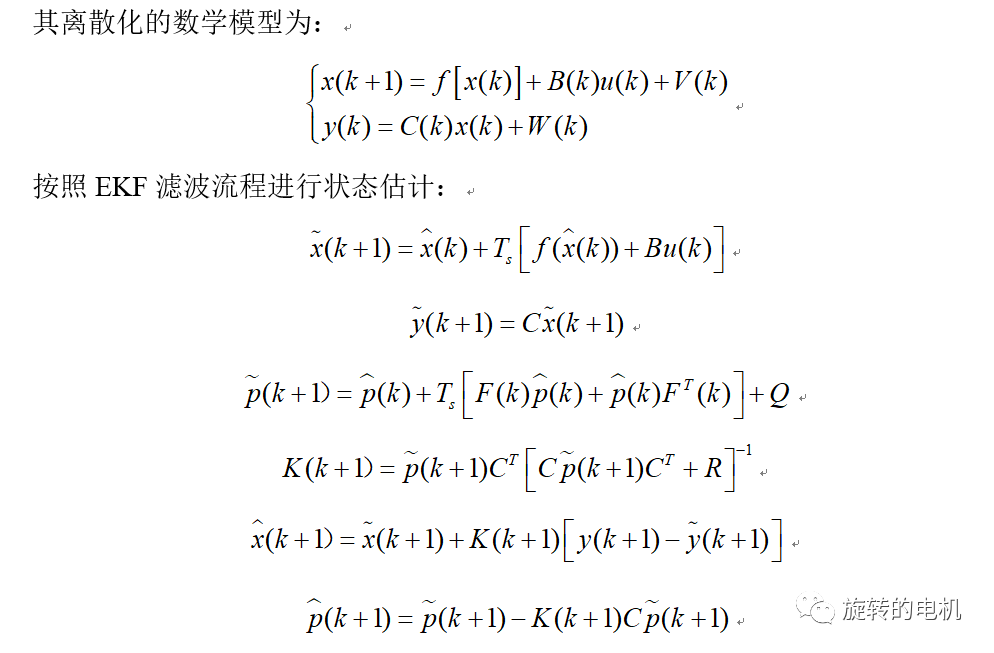
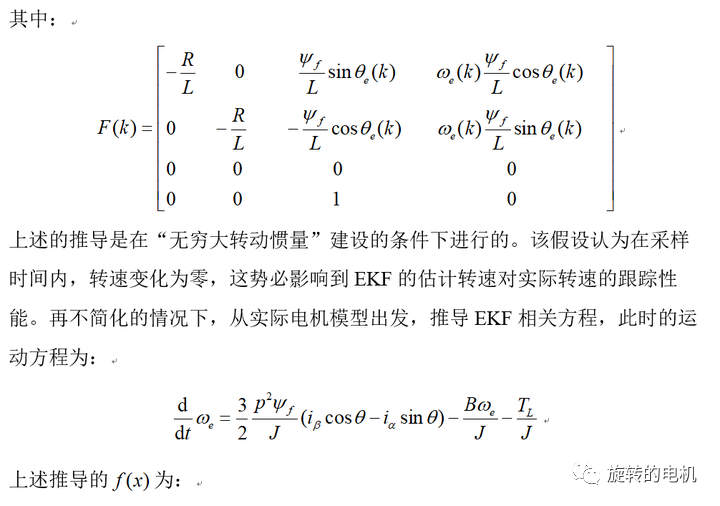
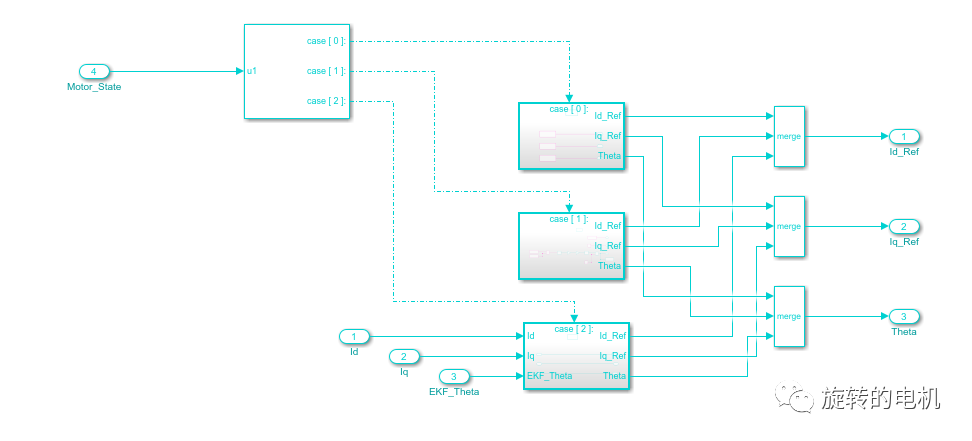
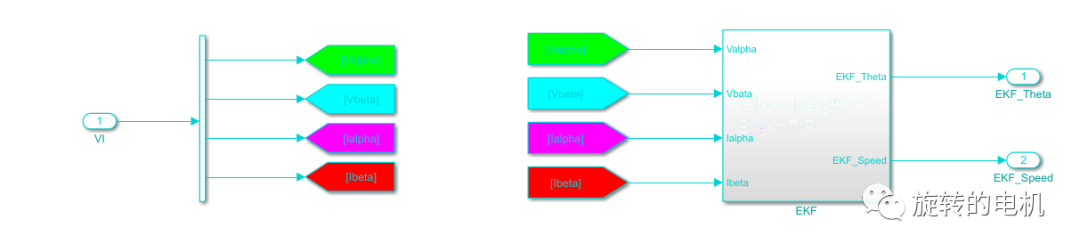
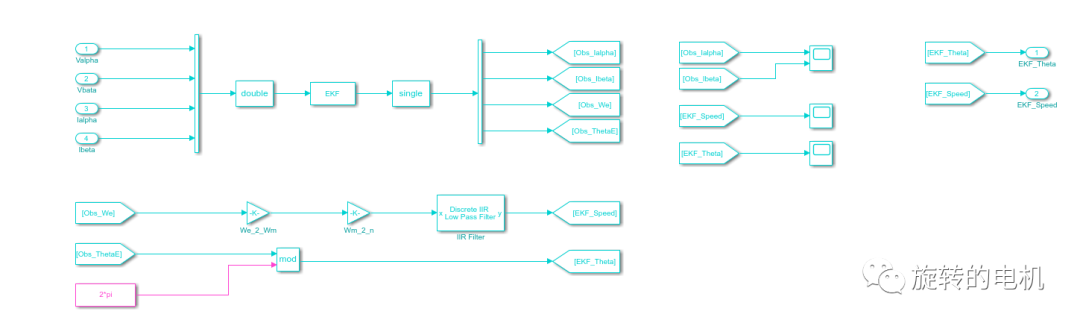
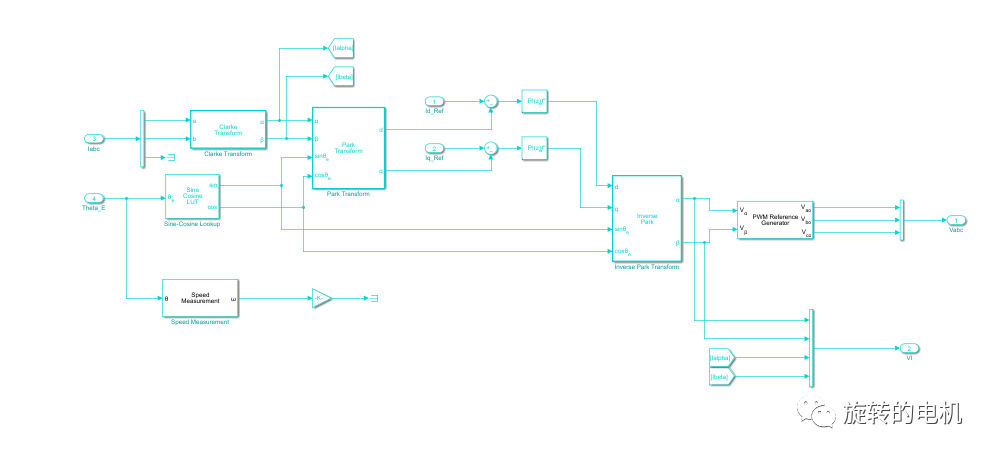
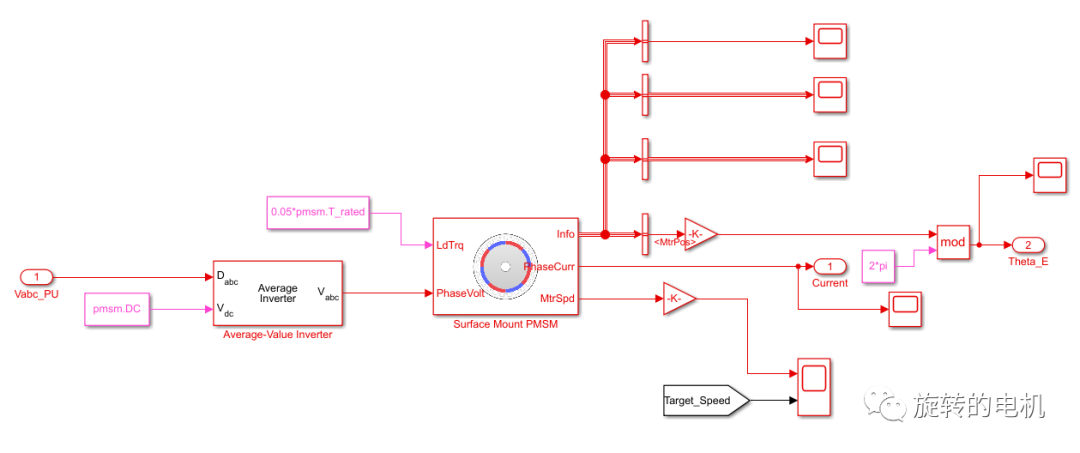
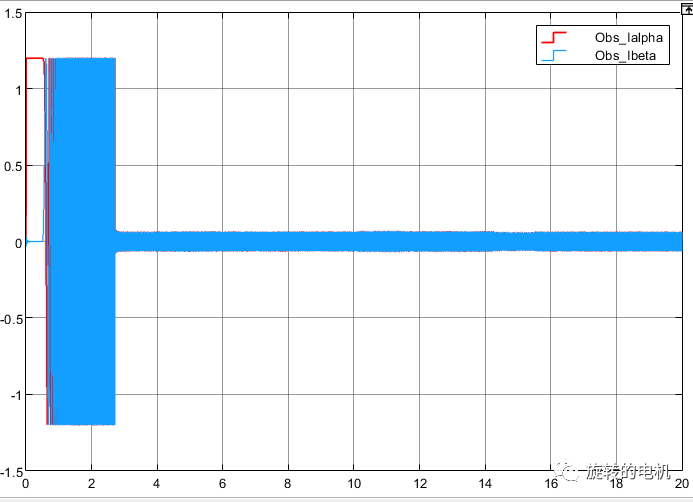
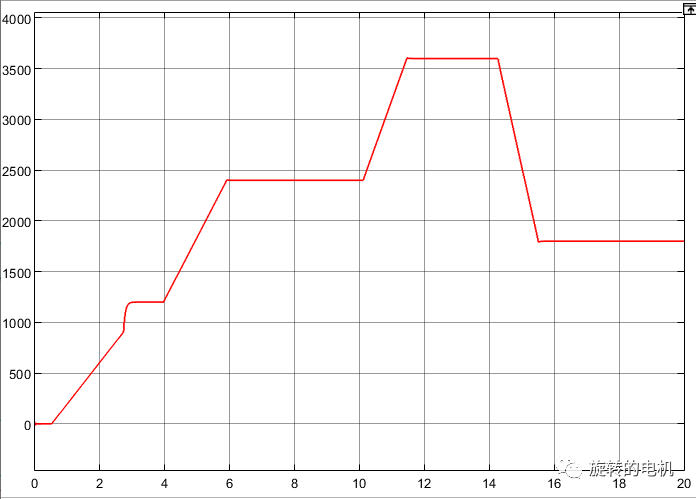
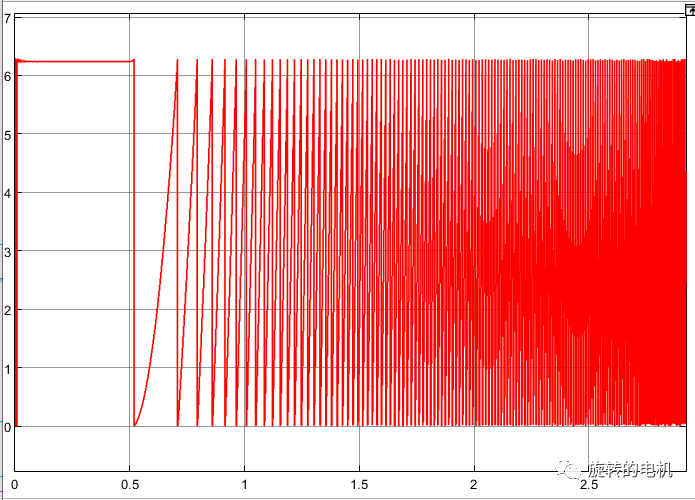
pmsm無感ekf永磁同步電機無感foc控制,采用ekf觀測器。帶原理圖,代碼純手寫,方便移植。用于學習,用于學習。
2021-08-27 06:28:10
前一段時間看到一篇論文,里面有一部分講解卡爾曼濾波,感覺講的挺簡單易懂的,現在分享一下只講不分享不是真漢紙!!這里有卡爾曼濾波器simulink模型,這里作為濾波器用。如果改變一些參數,也可以做辨識用。一碼多用,朋友們要記得回復啊~
2015-06-05 15:26:39
什么是卡爾曼濾波?具有哪些參數?
2021-09-30 08:50:30
卡爾曼濾波實現簡單,濾波效果好 ,下面分享一個基于卡爾曼濾波的matlab算法,數據全部為一維狀態,本人彌補的詳細備注,供愛好者研究學習。%%%%%%%%%%%%%%%%%%%功能說明:Kalman
2019-08-01 04:35:51
數據處理算法,卡爾曼濾波器同時具備良好的濾波特性。因此文章在分析永磁無刷直流電動機數學模型的基礎上,提出了一種基于卡爾曼濾波的無刷直流電機轉矩脈動抑制方法。利用 Madab/simuink 對此方法進行了
2025-07-29 16:13:23
怎樣去設計一種基于加速度計與氣壓計的三階卡爾曼濾波器呢?怎樣在matlab的simulink中去調用C語言并進行仿真呢?
2021-11-18 06:45:56
轉矩控制,感應電機的積分模型,基于積分模型和神經網絡的參數估計方法,擴展卡爾曼濾波器的無速度傳感器控制,遺傳算法優化的隨機脈沖寬度調制(PWM)策略,感應電機智能控制實驗系統、實驗及實驗結果等內容。本
2025-05-28 15:53:42
哪位大神對無跡卡爾曼濾波研究的比較透徹,想請教幾個問題。求指導
2016-03-14 21:15:47
【作者】:***;宋申民;陳興林;【來源】:《控制理論與應用》2010年02期【摘要】:將高斯過程回歸融入平方根無跡卡爾曼濾波(SRUKF)算法,本文提出了一種不確定系統模型協方差自適應調節濾波算法
2010-04-24 09:04:39
飛行器動力學參數在線辨識EKF算法實驗流程飛行器俯仰通道動力學方程線性化飛行器俯仰通道動力學方程離散化線性卡爾曼濾波過程實驗流程??飛行器俯仰通道動力學微分方程是連續非線性方程,要進行擴展卡爾曼濾波
2021-08-27 06:06:16
(英文版)MATLAB在卡爾曼濾波器中應用的理論與實踐KalmanfilteringtheoryandpracticeusingMATLAB-email
2020-03-12 12:35:17
離散卡爾曼濾波器1960年,卡爾曼發表了他著名的用遞歸方法解決離散數據線性濾波問題的論文[Kalman60] 。從那以后,得益于數字計算技術的進步,卡爾曼濾波器已成為推廣
2008-07-14 13:03:57 0
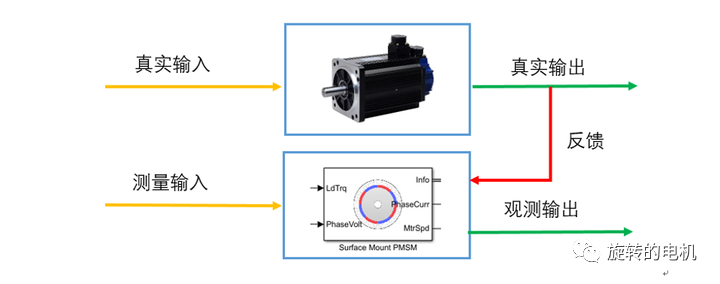
0 介紹了采用MC56F8013 芯片實現的永磁同步電機無位置傳感器調速系統和一種基于EKF(擴展卡爾曼濾波)實現PMSM 轉子位置和速度估計的方法,通過檢測電機端電壓和流過定子線圈的電
2009-04-03 09:43:1032 本文提出了一種基于擴展卡爾曼濾波器的永磁同步電機無機械傳感器控制方法。通過選取定子固定坐標系下的定子磁鏈和電機轉速、轉子位置作為狀態變量,構建了一個四階擴展卡
2009-04-03 11:23:0820 介紹DSP56F805 的各種片內資源,著重討論與電機控制有關的部分;描述DSP56F805 環境下的基于擴展卡爾曼濾波的高性能直流無刷電機控制方式, 給出外圍電路和控制軟件的流程圖。
2009-04-15 11:52:0241 從卡爾曼濾波器的理論出發,結合感應電機數學模型,設計了獲取異步電動機轉子位置、轉子速度和轉子磁通的擴展卡爾曼觀測器模型. 仿真結果表明,該方案能使系統獲得良好的動
2009-07-01 09:21:0117 從卡爾曼濾波器的理論出發,結合感應電機數學模型,設計了獲取異步電動機轉子位置、轉子速度和轉子磁通的擴展卡爾曼觀測器模型. 仿真結果表明,該方案能使系統獲得良好的動
2009-07-01 09:21:0415 針對工業過程中常見的二階滯后對象的PID參數調節問題,采用KALMAN濾波器同常規PID控制相結合的方法對系統進行仿真研究。結果表明:同沒有加卡爾曼濾波器的常規PID控制相比,
2009-07-09 08:27:0641 在異步電機控制基礎上, 利用擴展卡爾曼濾波器將轉子轉速看成系統的一個狀態量,根據定子側可以測量的電流、電壓值, 逐步估計出轉子轉速, 為研制無速度傳感器控制打下基礎。
2009-07-16 10:22:1958 卡爾曼濾波在通信、雷達、導航、自動控制等領域有廣泛的應用,它是最佳估計并且可以進行遞推運算,本文從工程應用的角度出發,根據卡爾曼濾波在雷達數據處理中的應用,
2009-09-22 11:28:2392 擴展卡爾曼濾波估計載波參數的算法研究:提出了一種在接收信號幅度未知的情況下進行載波參數估計的擴展卡爾曼濾波算法,該算法把信號幅度及偽碼自相關的乘積作為一個獨立變
2009-10-20 18:04:1834 卡爾曼濾波器matlab源程序代碼:main 是主函數! 運行即可p184是一個示意圖! 另外兩個文件是濾波模型
alpha=0.8; % 加權
2010-02-08 12:20:30278 matlab卡爾曼濾波程序:main 是主函數! 運行即可p184是一個示意圖! 另外兩個文件是濾波模型
2010-02-08 13:02:0656 介紹了3種最基本非線性濾波算法——擴展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)和粒子濾波(PF)算法的理論在機動目標跟蹤中的應用。通過仿真試驗對三者性能進行了分析比較。
2010-07-08 15:34:5616 利用matlab里面的simulink 工具箱進行濾波器的設計和仿真
2010-11-01 11:42:06302 為了提高直接轉矩控制(DTC)系統定子磁鏈估計精度,降低電流、電壓測量的隨機誤差,提出了一種基于擴展卡爾曼濾波(EKF)實現異步電機轉子位置和速度估計的方法。擴展卡爾
2010-11-22 16:18:0631 文中闡述一種移動機器人SLAM問題的解決方法,首先利用激光測距儀得到環境中障礙物的監測圖表,然后增量的構建全局地圖。利用擴展卡爾曼濾波器(EKF)創建移動機器人定位計算的有
2012-02-01 14:57:54144 將擴展卡爾曼濾波算法由6維推廣至9維,根據觀測到的坐標位置、方位角和俯仰角,應用擴展卡爾曼濾波算法進行濾波,并通過計算機仿真得以驗證,從而獲得較好的定位效果。
2012-03-22 17:17:4415 建立了雙觀測站被動跟蹤系統的非線性濾波模型,通過擴展卡爾曼濾波方法在該非線性模型下的具體實現步驟。分析了目標通過不同角度向觀測站襲來時,卡爾曼濾波算法對目標參數估計的
2012-04-18 15:32:3450 采用霍夫變換法對雷達目標進行起始,解決了機動目標的非線性強的問題,得到精確的航跡起始初值信息,并將初值信息作為無跡卡爾曼濾波目標跟蹤的初始輸入,實現對機動目標的跟
2013-08-19 17:48:2042 卡爾曼濾波器在PID控制中的仿真研究,專業論文,研究四軸的可以看看
2015-11-02 10:47:3622 這是關于卡爾曼濾波的一份相當不錯的資料,詳細的剖析了卡爾曼濾波原理
2015-12-15 14:19:3360 基于Matlab/Simulink的無刷直流電機控制仿真研究基于Matlab/Simulink的無刷直流電機控制仿真研究基于Matlab/Simulink的無刷直流電機控制仿真研究基于Matlab/Simulink的無刷直流電機控制仿真研究
2015-12-29 10:32:500 用溫度控制的例子介紹卡爾曼濾波的原理,很通俗,同意理解
2016-01-15 15:44:106 《卡爾曼濾波原理及應用-MATLAB仿真》程序
2016-03-07 11:50:48179 卡爾曼濾波的學習與應用。
2016-04-13 15:15:387 介紹卡爾曼濾波器及其各種衍生方法。首先給出卡爾曼濾波器的算法流程以及所有參數的含義,并對影響濾波效果的
五個主要參數進行了討論。然后通過仿真實驗研究不同的參數取值對于卡爾曼濾波的影響。最后總結在不同應用場景下使用卡爾
曼濾波器的宗旨和要點。
2016-06-21 17:56:396 《Matlab Simulink與控制系統仿真》,感興趣的小伙伴們可以看看。
2016-08-09 17:33:1382 卡爾曼濾波講解,感興趣的小伙伴們可以瞧一瞧。
2016-08-23 17:56:0014 卡爾曼濾波器[附帶例程] 通俗易懂 附上工程代碼 C語言 c++ 以及matlab
2016-09-27 16:34:1618 卡爾曼濾波算法
2016-12-17 17:22:2253 基于卡爾曼濾波滑模變結構轉子位置觀測器的PMSM無差拍控制_邱忠才
2017-01-07 17:01:106 采用擴展卡爾曼濾波磁鏈觀測器的永磁同步電機直接轉矩控制
2017-01-21 11:49:351 為了提高標準擴展卡爾曼姿態估計算法的精確度和快速性,將運動加速度抑制的動態步長梯度下降算法融入擴展卡爾曼中,提出一種改進擴展卡爾曼的四旋翼姿態估計算法。該算法在卡爾曼測量更新中采用梯度下降法進行
2017-12-04 11:31:262 為了提高直接轉矩控制(DTC)系統定子磁鏈估計精度,降低電流、電壓測量的隨機誤差,提出了一種基于擴展卡爾曼濾波(EKF)實現異步電機轉子位置和速度估計的方法。擴展卡爾曼濾波器是建立在基于旋轉坐標系下
2017-12-06 10:14:2418 ,利用神經網絡算法擬合電池的荷電狀態與模型各個參數之間的函數關系,經過多次實驗,確定了神經網絡算法的收斂曲線,此方法比傳統的曲線擬合精度高。介紹了擴展卡爾曼濾波和無跡卡爾曼濾波的原理,并設計了等效電路模型驗證實驗、電池的
2017-12-08 16:47:192 針對慣性導航應用中,姿態解算與外力加速度估計互相干擾的問題,提出一種基于四元數和擴展卡爾曼濾波器的姿態解算與外力加速度同步估計算法。首先,利用估計的外力加速度修正傳感器加速度數據得到準確的反向
2017-12-19 14:11:576 抖振。針對具有噪聲干擾的場合,在控制系統巾加入了卡爾曼濾波器消除了傳感器測量帶來的隨機噪聲和過程噪聲。在Matlab/Simulink平臺上,進行了振動正弦輸出力跟隨控制仿真研究,并且比較了有卡爾曼濾波器和無卡爾曼濾波器的跟
2018-02-26 14:20:380 本文開始闡述了卡爾曼濾波的概念,其次闡述了卡爾曼濾波的性質與卡爾曼濾波的應用,最后介紹了mpu6050卡爾曼濾波分析及mpu6050卡爾曼濾波輸出姿態角程序。
2018-03-09 08:57:3176219 
本文提出了一種基于擴展卡爾曼濾波(EKF)的永磁同步電機(ROM)無位置傳感器CONTIOL方法的建模、分析、設計和實驗驗證,以準確地估計轉速和轉子位置。
2018-05-31 11:45:4530 。 本文旨在對離散系統的卡爾曼濾波作應用方面的介紹:包括對基本離散卡爾曼濾波器的描述與討論;對擴展型卡爾曼濾波的討論;應用實例進行分析和仿真;討論卡爾曼濾波在汽車定位與導航工程上的應用。
2019-07-25 08:00:004 本文檔的主要內容詳細介紹的是多旋翼飛行器的可觀性和卡爾曼濾波教程詳細說明包括了:1.可觀性 2.卡爾曼濾波 3.多速率采樣卡爾曼濾波 4.擴展卡爾曼濾波 5.應用實例 6.總結
2019-10-31 08:00:001 本文檔的主要內容詳細介紹的是幾種最優估計和卡爾曼濾波原理的學習課件免費下載包括了:1 卡爾曼濾波與最優估計 ,2 卡爾曼濾波方程 ,3 連續系統的卡爾曼濾波方程,4 連續—離散系統卡爾曼濾波方程 ,5 卡爾曼濾波在組合導航中的應用方式 ,6 非線性系統的卡爾曼濾波
2020-05-09 08:00:0022 本書主要介紹數字信號處理中的卡爾曼( Kalman)濾波算法及在相關領域應用的相關內容。全書共7章。第1章為緒論。第2章介紹MATLAB算法仿真的編程基礎。第3章介紹線性 Kalman濾波。第4章
2020-09-23 08:00:0035 AN-1157: 在ADIS16480中調諧擴展卡爾曼濾波器
2021-03-20 21:28:578 通過監測齒輪的嚙合剛度就能夠估計齒輪副的工作狀態。根據齒輪副的動力學模型建立齒輪嚙合剛度的離散辨識模型,提岀基于擴展卡爾曼濾波器和希爾伯特-黃變換瞬時頻率,利用振動信號對齒輪嚙合剛度進行估計的動態辨識算法。
2021-05-31 10:16:233 基于擴展卡爾曼濾波SOC估算Simuli<x>nk仿真,內容完整,模型可仿真,代碼可實現
2021-08-25 15:22:2914 MATLAB在卡爾曼濾波器中應用的理論與實踐Kalma(英文版)
2021-10-18 10:06:580 卡爾曼濾波原理及應用-黃小平
2022-06-09 14:37:230 理論應用到非線性系統的擴展卡爾曼算法 Extended Kalman Filter(EKF)[2]。相比于線性卡爾曼濾波器,擴展卡爾曼濾波器有更廣的適用范圍[3, 4],更高的狀態估計精度,可以處理任意更新頻率的系統。 有了上文的基礎,這里,我們將通過一個二維小車的例子并來介紹擴展卡爾曼濾波的原理。
2022-08-12 10:06:327096 
我們可以用這些公式對任何線性系統建立精確的模型,對于非線性系統來說,我們使用擴展卡爾曼濾波,區別在于EKF多了一個把預測和測量部分進行線性化的過程。
2022-10-19 16:45:2911692 **卡爾曼濾波**自從1960被Kalman發明并應用到阿波羅登月計劃之后一直經久不衰,直到現在也被機器人、自動駕駛、飛行控制等領域應用。基礎卡爾曼濾波只能對線性系統建模;擴展卡爾曼濾波對非線性方程做線性近似以便將卡爾曼濾波應用到非線性系統。
2023-02-13 10:03:321382 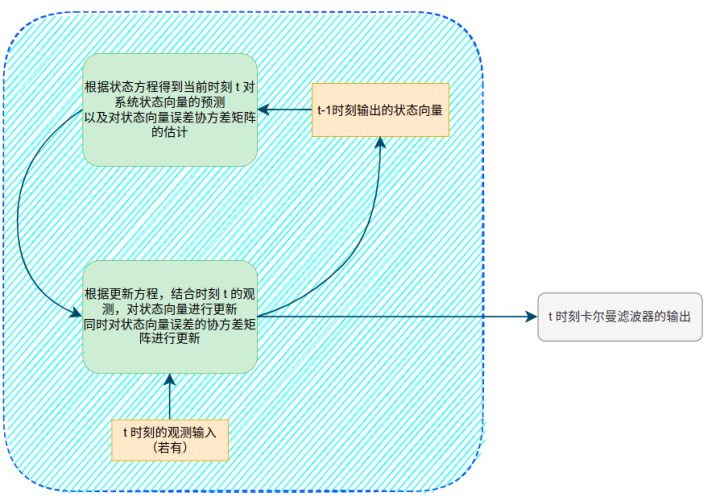
**卡爾曼濾波**自從1960被Kalman發明并應用到阿波羅登月計劃之后一直經久不衰,直到現在也被機器人、自動駕駛、飛行控制等領域應用。基礎卡爾曼濾波只能對線性系統建模;擴展卡爾曼濾波對非線性方程做線性近似以便將卡爾曼濾波應用到非線性系統。
2023-02-13 10:04:26987 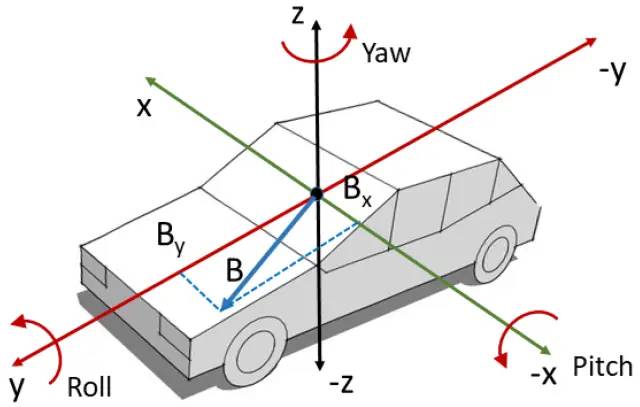
**卡爾曼濾波**自從1960被Kalman發明并應用到阿波羅登月計劃之后一直經久不衰,直到現在也被機器人、自動駕駛、飛行控制等領域應用。基礎卡爾曼濾波只能對線性系統建模;擴展卡爾曼濾波對非線性方程做線性近似以便將卡爾曼濾波應用到非線性系統。
2023-02-13 10:05:401460 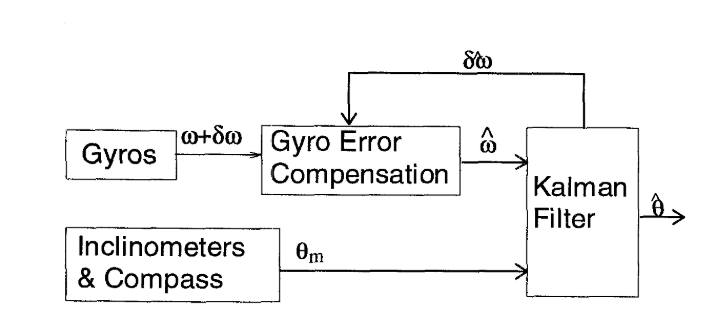
**卡爾曼濾波**自從1960被Kalman發明并應用到阿波羅登月計劃之后一直經久不衰,直到現在也被機器人、自動駕駛、飛行控制等領域應用。基礎卡爾曼濾波只能對線性系統建模;擴展卡爾曼濾波對非線性方程做線性近似以便將卡爾曼濾波應用到非線性系統。
2023-02-13 10:05:571671 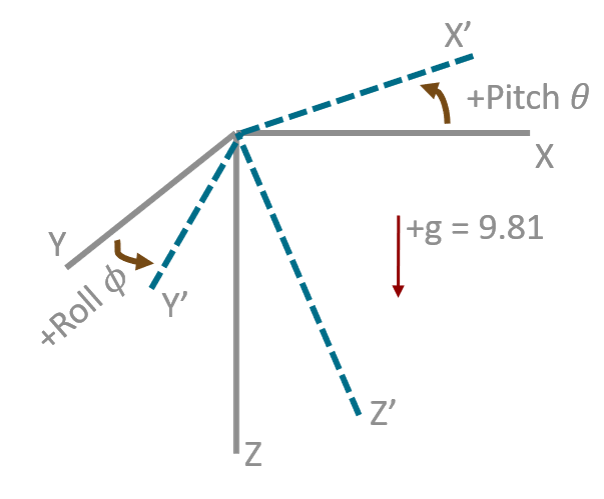
針對高速飛行目標航跡跟蹤問題,進行了擴展卡爾曼濾波的曲線擬和仿真試驗研究。首先建立目標跟蹤的數學模型,確定了系統對應的參數及狀態方程,進而將線性卡爾曼濾波器進行擴展。將函數形式的濾波模型在函數自變量
2023-02-15 17:25:161 卡爾曼濾波是一種線性最小方差估計,是一種最優估計算法。 其采用遞推算法,通常只要系統的初始狀態和初始誤差矩陣已知,根據導出公式,就可對
系 統狀態做出較為精確的估計。 使用狀態空間法在時域內設計濾波器,其離散型算法較容易實現數字化。
2023-03-14 10:38:451 。
百度百科是這樣說的,也就是說卡爾曼濾波第一是遞歸濾波,其次KF用于線性系統。
但經過研究和改進,出現了很多卡爾曼,如EKF(extended kalman filter)擴展卡爾曼,UKF(Unscented?Kalman?Filter)無跡卡爾曼等等。
2023-05-10 17:51:066 本章節采用龍伯格觀測器進行永磁同步電機的無傳感器控制,首先分析了龍伯格觀測器的原理,然后設計了PMSM的全階龍伯格觀測器,最后通過Matlab/Simulink對該觀測器方案進行仿真分析,為了進行
2023-06-08 14:46:037086 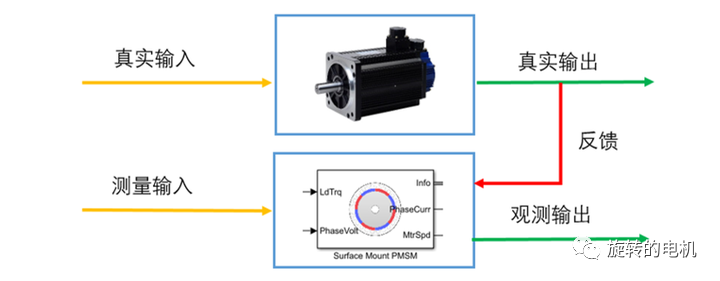
在 飛行器姿態計算 中,卡爾曼濾波是最常用的姿態計算方法之一。今天就以目前的理解講以下卡爾曼濾波。
2023-06-14 10:44:562917 卡爾曼濾波本質上是尋找兩個分布線性組合取得最新小均方差的問題。然后擴展到多維向量空間。
2023-07-13 16:40:591477 
一、什么是卡爾曼濾波? 你可以在任何含有不確定信息的動態系統中使用卡爾曼濾波,對系統下一步的走向做出有根據的預測,即使伴隨著各種干擾,卡爾曼濾波總是能指出真實發生的情況。 在連續變化的系統中使用卡爾
2023-08-08 09:39:518952 
本文對于擴展卡爾曼濾波、無跡卡爾曼濾波僅僅做了一些簡要介紹,不再想上次的文章那樣做詳細地推導了。但只要看過之前寫的卡爾曼濾波,相信這篇文章對于你來說也是很好理解的。
2024-01-14 14:29:412066 
我們前一篇關于人物識別跟蹤的文章《視頻連續目標跟蹤實現的兩種方法和示例(更新)》里講到,視頻圖像中物體的識別和跟蹤用到了卡爾曼濾波器(KF)。這里對這個話題我們稍微對這個卡爾曼濾波器進行一個整理。
2024-11-04 11:36:341504 
卡爾曼濾波在圖像處理中的應用實例 卡爾曼濾波在圖像處理中主要應用于目標跟蹤、噪聲消除和圖像恢復等方面。以下是一些具體的應用實例: 目標跟蹤 : 通過跟蹤圖像中的目標,卡爾曼濾波可以實現目標的位置
2024-12-16 09:11:202654 ,給出當前狀態的最優估計,該算法涉及的核心方程有: 其中,xt為系統狀態矩陣;zt為系統觀測矩陣(實驗結果);A為狀態轉移矩陣;B為控制輸入矩陣;H為狀態觀測矩陣。 附2、卡爾曼濾波應用實例? 本部分通過簡單的算例,介紹了
2025-01-08 10:26:252158 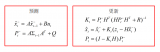
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論