卡爾曼濾波(KalmanFilter)是一種遞歸的、自適應的濾波算法,廣泛應用于估計系統狀態和觀測過程中的噪聲。它最初在1960年被提出,被認為是控制理論和信號處理領域中最重要的發展之一。卡爾曼
2023-12-07 08:08:40 4773
4773 
卡爾曼濾波(Kalman Filter)是一種遞歸的、自適應的濾波算法,廣泛應用于估計系統狀態和觀測過程中的噪聲。它最初在1960年被提出,被認為是控制理論和信號處理領域中最重要的發展之一。卡爾曼濾波器在許多領域,包括導航、機器人、金融和通信系統中都有廣泛的應用。
2023-12-07 18:26:154766 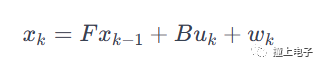
對于卡爾曼濾波的理解說到底,濾波,數據融合什么的就是一個數據修正,那么,如果我使用數字濾波器,將傳感器的數據進行效果比較好的濾波,那么是否可以拋棄卡爾曼濾波呢?在一個合適的時間,用加速度和磁傳感器
2015-06-11 16:02:41
卡爾曼濾波的估計值能很好的逼近真實值,我的疑惑是,這和濾波有什么關系,請高手介紹下卡爾曼算法是如何濾波的?
2013-07-04 22:57:04
卡爾曼濾波算法對比其他的濾波算法有什么優點
2023-10-11 06:42:24
一、卡爾曼濾波九軸融合算法stm32嘗試1、Kalman濾波文件[.h已經封裝為結構體]Kalman.h2、I2C總線代碼[這里把MPU和HMC掛接到上面,通過改變SlaveAddress的值來
2022-02-10 07:18:25
卡爾曼濾波器是屬于一個高通濾波器還是帶通濾波器
2023-10-11 06:58:07
卡爾曼濾波風力發電機中的風速估計,轉速估計甚至扭矩估計都設計到卡爾曼濾波,如果只是單一傳感變量的平滑處理也能用到卡爾曼濾波。振動信號中的濾波大多采用低通去除高頻噪音,而卡爾曼濾波則是通過不確定度把
2021-07-12 06:00:47
機器人導航,控制,傳感器數據融合甚至在軍事方面的雷達系統以及導彈追蹤等等。近年來更被應用于計算機圖像處理,例如頭臉識別,圖像分割,圖像邊緣檢測等等。2.卡爾曼濾波器的介紹(Introduction
2016-09-21 11:41:07
希望這篇筆記可以幫助到你。卡爾曼濾波(Kalman filtering)是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。卡爾曼濾波簡介:你可能經常聽學長學姐提起這個...
2022-02-28 14:24:57
及噪聲協方差;估計階段由回歸模型代替狀態方程和觀測方程,相應的噪聲協方差實時自適應調整.該方法克服了傳統方法容易受系統動態模型不確定性和噪聲協方差不準確限制的問題,仿真結果驗證了算法的有效性卡爾曼濾波器算法(C語言)
2011-10-24 09:59:04
卡爾曼濾波器介紹
2016-08-17 12:06:34
一系列遞歸數學公式描述。它們提供了一種高效可計算的方法來估計過程的狀態,并使估計均方誤差最小。卡爾曼濾波器應用廣泛且功能強大:它可以估計信號的過去和當前狀態,甚至能估計將來的狀態,即使并不知道模型的確
2008-07-14 13:06:49
卡爾曼濾波器原理的學習理解
2016-08-17 12:38:55
用的狀態估計方法。直觀上來講,卡爾曼濾波器在這里起了數據融合的作用,只需要輸入當前的測量值(多個傳感器數據)和上一個周期的估計值就能估計當前的狀態,這個估計出來的當前狀態綜合考量了傳感器數據(即所謂...
2021-11-16 09:10:40
[開發工具] STM32算法的翅膀之MATLAB基于加速度計與氣壓計的三階卡爾曼濾波計算加速度、速度及高度主要介紹了卡爾曼濾波器的使用原理,給出了matlab代碼,并在STM32F407平臺對卡爾曼濾波器進行了驗證,傳感器為MPU6050與DPS310,測試結果令人滿意,速度與高度無累積...
2021-08-17 07:02:07
最近兩日在看卡爾曼濾波。看完理論后,從網上搜索了一段代碼來看,然后就懵逼了。這段代碼被人轉的次數特別多,應該做飛控的都用過。不知道各位有沒有自己推導過。反正我是中間有一步不太懂。在這里先把自己弄懂
2019-08-04 19:41:37
卡爾曼濾波器通俗講解
2016-08-17 12:06:59
用最廣泛的就是估計理論中的卡爾曼濾波方法。與其他估計算法相比,卡爾曼濾波具有顯著的優點:采用狀態空間法在時域內設計濾波器,用狀態方程就可以描述任何復雜多維信號的動力學特性,避開了在頻域內對信號功譜做
2018-11-14 15:12:26
labview中,去哪下載卡爾曼濾波器工具包,能給個網址么?謝謝了~~~~~
2013-12-16 15:44:09
相應的濾波算法卡爾曼濾波要點建立系統模型,確定濾波量 確定預測量 確定測量量 進行五個方程計算濾波傳感器融合在陀螺儀和加速度傳感器濾波的融合中,我們得首先建立起模型(融合只適用于重力情況下,若加速度傳感器
2015-06-12 15:11:05
卡爾曼濾波實現簡單,濾波效果好 ,下面分享一個基于卡爾曼濾波的matlab算法,數據全部為一維狀態,本人彌補的詳細備注,供愛好者研究學習。%%%%%%%%%%%%%%%%%%%功能說明:Kalman
2019-08-01 04:35:51
采用CarlsON 最優數據融合準則, 將基于Kalman 濾波的多傳感器狀態融合估計方法應用到雷達跟蹤系統。仿真實驗表明,多傳感器Kalman 濾波狀態融合估計誤差小于單傳感器Kalman 濾波得出的狀態估計誤差,驗證了方法對雷達跟蹤的有效性。
2020-04-06 07:42:16
://blog.csdn.net/u011344545==========================================本文設計了一種基于STM32/51單片機的使用MPU6050傳感器的利用卡爾曼濾波器算法的角度測量儀(直接上代碼)代碼下載(附PPT)MPU-6050 :是6軸運動處理
2022-02-10 07:57:19
目標跟蹤算法的研究,并加入噪聲干擾,更接近真實的軍事與民用環境。首先搭建紅外/雷達雙模導引頭仿真平臺,進而設計基于多傳感器的多模型機動目標跟蹤算法,采用擴展卡爾曼濾波,最終實現算法的軟件仿真及跟蹤性能
2018-12-05 15:16:23
基于無跡卡爾曼濾波的四旋翼無人飛行器姿態估計算法_朱巖
2020-06-04 08:48:36
。2.數字濾波算法的選擇根據運動傳感器噪聲模型,一般以下濾波算法可供融合算法選擇: a)互補濾波算法 b)擴展卡爾曼濾波算法 c)無跡卡爾曼濾波算法 d)粒子濾波算法 e)Mahony互補濾波算法
2019-07-19 06:47:49
摘 要:利用最優的融合簇狀態估計的K rein 空間卡爾曼濾波方法,得到信息形式的魯棒卡爾曼濾波。簇頭節點通過所處簇的觀測模型,利用信息形式的魯棒卡爾曼濾波實現離散形式的卡爾曼濾波。簇頭節點將狀態
2009-10-05 17:28:51
有偏卡爾曼濾波器可以用來消除無線定位中的非視距誤差,首次使用有偏卡爾曼濾波器的參考文獻是下面兩篇論文[1]劉琚,李靜.一種在非視距環境中的TDOA/AOA混合定位方法[J].通信學報,2005,26
2011-11-07 13:55:15
有沒有基于9軸傳感器的三階卡爾曼濾波器算法
2023-11-06 06:00:44
系統動態模型不確定性和噪聲協方差不準確限制的問題,仿真結果驗證了算法的有效性【關鍵詞】:高斯過程回歸;;平方根無跡卡爾曼濾波器;;自適應【DOI】:CNKI:SUN:KZLY.0.2010-02-005
2010-04-24 09:04:39
算法完成實現什么功能?比如我是不是可以這樣:先寫卡爾曼濾波器算法,然后添加程序追蹤鼠標位置程序,最后運行實現就可以了?{:4_97:}那那個轉換測量是什么意思??謝了各位啊~
2013-01-15 12:29:16
數據融合甚至在軍事方面的雷達系統以及導彈追蹤等等。近年來更被應用于計算機圖像處理,例如頭臉識別,圖像分割,圖像邊緣檢測等等。二、卡爾曼濾波器的通俗理解。這是網上的關于解釋卡爾曼濾波器原理的一個經典例子
2016-06-17 14:59:09
離散卡爾曼濾波器1960年,卡爾曼發表了他著名的用遞歸方法解決離散數據線性濾波問題的論文[Kalman60] 。從那以后,得益于數字計算技術的進步,卡爾曼濾波器已成為推廣
2008-07-14 13:03:57 0
0 為了有效防止捷聯慣導系統濾波發散,本文從卡爾曼濾波原理出發,介紹了漸消卡爾曼濾波原理、遺忘因子等內容,通過對漸消因子的推導及計算機仿真,給出了常規卡爾曼濾波器
2009-05-30 08:49:5324 介紹了基于多傳感器信息融合技術的聯合卡爾曼濾波器的一般設計方法,并將此方法運用于艦船INS/ GPS/ Loran2C 組合導航系統中。理論分析與仿真結果表明,該聯合卡爾曼濾波器的設計合
2009-06-25 08:35:4132 本文將強跟蹤濾波理論與多傳感器數據融合技術相結合,提出基于強跟蹤濾波器的多傳感器狀態與參數聯合估計新算法;對擁有相同采樣率的分布式多傳感器單模型非線性動態系統,
2009-06-30 10:43:5019 給出了基于多傳感器數據融合技術的自動控制系統狀態估計的結構與算法。仿真實驗表明,應用多傳感器融合技術有利于提高系統狀態估計的性能。關鍵詞:狀態估計;數據融合;
2009-07-03 10:22:5812 對集中濾波器和分散濾波器的性能特點進行了比較和分析,指出了它們應用于多傳感器系統時的不足之處,提出了聯合卡爾曼濾波器的結構和算法,并在精度、計算效率和容錯能力方
2009-07-09 13:47:0635 介紹了基于多傳感器信息融合技術的聯合卡爾曼濾波器的一般設計方法,并將此方法運用于艦船$I& L MN& L %D)*5 O 0 組合導航系統中。理論分析與仿真結果表明,該聯合卡爾曼
2009-07-11 11:05:5017 擴展卡爾曼濾波估計載波參數的算法研究:提出了一種在接收信號幅度未知的情況下進行載波參數估計的擴展卡爾曼濾波算法,該算法把信號幅度及偽碼自相關的乘積作為一個獨立變
2009-10-20 18:04:1834 狀態估計是卡爾曼濾波的重要組成部分。一般來說,根據觀測數據對隨機量進行定量推斷就是估計問題,特別是對動態行為的狀態估計,它能實現實時運行狀態的估計和預測功能。比如對飛行器狀態估計。
2016-01-22 14:08:353 介紹卡爾曼濾波器及其各種衍生方法。首先給出卡爾曼濾波器的算法流程以及所有參數的含義,并對影響濾波效果的
五個主要參數進行了討論。然后通過仿真實驗研究不同的參數取值對于卡爾曼濾波的影響。最后總結在不同應用場景下使用卡爾
曼濾波器的宗旨和要點。
2016-06-21 17:56:396 卡爾曼濾波算法
2016-12-17 17:22:2253 電池SOC的自適應平方根無極卡爾曼濾波估計算法,下來看看
2017-01-13 13:26:0221 自適應卡爾曼濾波器在車用鋰離子動力電池SOC估計上的應用
2017-01-13 13:50:4520 電池SOC的自適應平方根無極卡爾曼濾波估計算法_胡志坤
2017-01-07 17:16:233 一種基于增量式卡爾曼濾波器的PMSM轉速濾波算法_肖曦
2017-01-08 11:28:385 為提高工業物聯網實測數據精度,減少數據冗余、 測量誤差,提出了一種使用自適應無跡卡爾曼濾波( AUKF)算法對工業物聯網中的多傳感器信息進行數據融合處理的方法。 首先給出并比較卡爾曼算法以及常規無跡
2017-01-13 16:03:1035 MPU6050 卡爾曼濾波器設計
2017-06-23 10:51:5441 卡爾曼濾波(Kalman filtering)一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。由于觀測數據中包括系統中的噪聲和干擾的影響,所以最優估計也可看作是濾波
2017-10-29 11:57:0932179 
簡單來說,卡爾曼濾波器是一個“optimal recursive data processing algorithm(最優化自回歸數據處理算法)”。對于解決很大部分的問題,他是最優,效率最高甚至
2017-10-30 08:47:0211537 
在無人機飛行參數測量中,受環境、干擾或自身穩定性等因素的影響,往往使測量數據中存在野值。為提高飛行數據處理精度,提出了一種基于觀測器/卡爾曼濾波辨識(OKID)的新算法用于估計飛行參數。該算法直接
2017-11-14 09:38:583 為了提高標準擴展卡爾曼姿態估計算法的精確度和快速性,將運動加速度抑制的動態步長梯度下降算法融入擴展卡爾曼中,提出一種改進擴展卡爾曼的四旋翼姿態估計算法。該算法在卡爾曼測量更新中采用梯度下降法進行
2017-12-04 11:31:262 針對慣性導航應用中,姿態解算與外力加速度估計互相干擾的問題,提出一種基于四元數和擴展卡爾曼濾波器的姿態解算與外力加速度同步估計算法。首先,利用估計的外力加速度修正傳感器加速度數據得到準確的反向
2017-12-19 14:11:576 針對一個無融合中心傳感器網絡中的狀態估計問題,提出一種基于量化信息的分布式卡爾曼濾波(QDKF)算法。首先,在分布式卡爾曼濾波(DKF)中,以節點狀態估計精度為加權準則,動態選取加權矩陣,使得全局
2018-01-07 11:18:130 卡爾曼濾波器是一種由卡爾曼(Kalman)提出的用于時變線性系統的遞歸濾波器。這個系統可用包含正交狀態變量的微分方程模型來描述,這種濾波器是將過去的測量估計誤差合并到新的測量誤差中來估計將來的誤差。
2018-02-07 18:06:465051 
卡爾曼于 1960 年提出了離散系統線性濾波的遞推求解方法即卡爾曼濾波算法。 該濾波算法是基于線性最小平方法的、進行有效遞推計算的一組數學方程式, 算法功能強大, 支持對過去、現在和將來狀態的估算
2019-07-25 08:00:004 與我的朋友交談時,我經常聽到:“哦,卡爾曼(Kalman)濾波器……我經常學它,然后我什么都忘了”。好吧,考慮到卡爾曼濾波器(KF)是世界上應用最廣泛的算法之一(如果環顧四周,你80%的技術可能已經在內部運行某種KF),讓我們嘗試將其弄清楚。
2020-05-05 08:25:0010728 
本文檔的主要內容詳細介紹的是幾種最優估計和卡爾曼濾波原理的學習課件免費下載包括了:1 卡爾曼濾波與最優估計 ,2 卡爾曼濾波方程 ,3 連續系統的卡爾曼濾波方程,4 連續—離散系統卡爾曼濾波方程 ,5 卡爾曼濾波在組合導航中的應用方式 ,6 非線性系統的卡爾曼濾波
2020-05-09 08:00:0022 在視頻圖像獲取過程中“由于噪聲對圖像序列的降質”需要設計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應卡爾曼濾波算法“并討論了自適應卡爾曼濾波算法的簡化”以利于硬件實現自適應卡爾曼濾波器“并進行了簡化算法仿真”完成基于FPGA實現的實時自適應卡爾曼濾波器的設計。
2021-01-22 14:29:2922 在視頻圖像獲取過程中“由于噪聲對圖像序列的降質”需要設計實時噪聲濾波器。討論了視頻圖像的卡爾曼濾波問題及自適應卡爾曼濾波算法“并討論了自適應卡爾曼濾波算法的簡化”以利于硬件實現自適應卡爾曼濾波器“并進行了簡化算法仿真”完成基于FPGA實現的實時自適應卡爾曼濾波器的設計。
2021-01-22 14:29:2914 基于卡爾曼濾波器的PID設計教程
2021-06-03 10:27:4139 多旋翼飛行器設計與控制的卡爾曼濾波器
2021-09-14 09:30:100 卡爾曼濾波器及其應用基礎.敬喜編
2021-10-18 10:14:570 用的狀態估計方法。直觀上來講,卡爾曼濾波器在這里起了數據融合的作用,只需要輸入當前的測量值(多個傳感器數據)和上一個周期的估計值就能估計當前的狀態,這個估計出來的當前狀態綜合考量了傳感器數據(即所謂...
2021-11-09 13:06:041 卡爾曼濾波器是一種基礎預測定位算法。原理非常簡單易懂。核心過程可以用一個圖說明:
2022-03-21 13:37:075473 卡爾曼濾波器是一種基礎預測定位算法。原理非常簡單易懂。
2022-03-21 13:47:476800 在很多實際工程問題當中,非線性系統占大多數,而卡爾曼提出來的卡爾曼濾波器是一種針對線性系統的估計算法[1]。 為了解決這一問題,Schmidt學者分析了卡爾曼濾波器中的系統模型部分,并提出將卡爾曼
2022-08-12 10:06:327093 
卡爾曼濾波的最終輸出是,真實的狀態為,令 對誤差的平方求最小值,同樣可以推導出公式(1-5)到公式(1-7)。因此卡爾曼濾波器也是系統狀態的最優估計。
2022-12-15 10:45:134485 卡爾曼濾波常用于動態多變化系統中的狀態估計,是一種通用性強的自回歸濾波器。它的由來和NASA登月有關。其發明者魯道夫.E.卡爾曼在一次訪問NASA的時候,發現阿波羅計劃中一個難點是軌道預測問題,因而
2023-02-10 14:31:131845 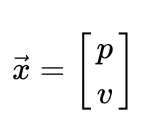
卡爾曼濾波常用于動態多變化系統中的狀態估計,是一種通用性強的自回歸濾波器。它的由來和NASA登月有關。其發明者魯道夫.E.卡爾曼在一次訪問NASA的時候,發現阿波羅計劃中一個難點是軌道預測問題,因而
2023-02-10 14:31:41829 
卡爾曼濾波實質上就是基于觀測值以及估計值二者的數據對真實值進行估計的過程。
2023-02-16 09:47:031859 卡爾曼濾波是一種線性最小方差估計,是一種最優估計算法。 其采用遞推算法,通常只要系統的初始狀態和初始誤差矩陣已知,根據導出公式,就可對
系 統狀態做出較為精確的估計。 使用狀態空間法在時域內設計濾波器,其離散型算法較容易實現數字化。
2023-03-14 10:38:451 卡爾曼濾波算法:卡爾曼濾波算法包括預測、更新和估計三個步驟。其中,預測步驟通過狀態的動態方程來預測系統的下一個狀態;更新步驟通過觀測方程來更新系統的狀態估計;估計步驟通過估計誤差來評估狀態估計的準確性。因此,需要深入了解卡爾曼濾波算法的基本思想和步驟。
2023-04-26 10:43:572397 卡爾曼濾波器是一種基礎預測定位算法。原理非常簡單易懂。核心過程可以用一個圖說明。
2023-05-09 17:30:351892 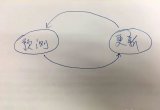
卡爾曼濾波是一種高效率的遞歸濾波器(自回歸濾波器), 它能夠從一系列的不完全包含噪聲的測量(英文:measurement)中,估計動態系統的狀態,然而簡單的卡爾曼濾波必須應用在符合高斯分布的系統中
2023-05-10 17:51:066 在 飛行器姿態計算 中,卡爾曼濾波是最常用的姿態計算方法之一。今天就以目前的理解講以下卡爾曼濾波。
2023-06-14 10:44:562917 電子發燒友網站提供《用于定位的實用卡爾曼濾波器.zip》資料免費下載
2023-06-16 10:07:350 卡爾曼濾波是一種用于估算線性動態系統狀態的優化算法,其基礎數學理論為貝葉斯定理,將傳感器測量值和系統模型的預測值進行融合,得到對系統狀態的估計。貝葉斯定理是基于條件概率的公式,用于計算給定某些證據
2023-08-30 10:18:101558 
卡爾曼濾波是一種用于估算線性動態系統狀態的優化算法,其基礎數學理論為貝葉斯定理,將傳感器測量值和系統模型的預測值進行融合,得到對系統狀態的估計。
2023-08-30 10:18:353267 卡爾曼濾波是一種估計和預測系統狀態的方法,通過將測量數據和系統模型結合,實現對系統狀態的最優估計。它在控制、通信、導航等領域具有廣泛應用。 卡爾曼濾波的核心思想是利用系統的動態方程和測量方程來
2023-12-07 11:18:0411239 卡爾曼濾波(Kalman Filter)是一種用于估計狀態的算法,最初由R.E. Kalman在1960年提出。它是一種線性高斯濾波器,常用于處理包含誤差噪聲的動態系統。卡爾曼濾波算法通過組合測量
2024-01-17 10:51:514983 卡爾曼濾波以及其擴展算法能夠應用于目標狀態估計,如果這個目標是行人,那么就是行人狀態估計(或者說行人追蹤),如果這個目標是自身,那么就是車輛自身的追蹤(結合一些地圖的先驗,GPS等數據的話就是自身的定位)。
2024-04-29 09:46:393075 
卡爾曼濾波(Kalman Filter)是一種線性動態系統的狀態估計算法,廣泛應用于信號處理、導航、控制等領域。 卡爾曼濾波的優點 1.1 高效性 卡爾曼濾波是一種遞歸算法,可以在實時系統中高
2024-08-01 15:24:355437 我們前一篇關于人物識別跟蹤的文章《視頻連續目標跟蹤實現的兩種方法和示例(更新)》里講到,視頻圖像中物體的識別和跟蹤用到了卡爾曼濾波器(KF)。這里對這個話題我們稍微對這個卡爾曼濾波器進行一個整理。
2024-11-04 11:36:341503 
卡爾曼濾波的基本原理 卡爾曼濾波是一種基于貝葉斯濾波的算法,它通過結合預測和更新兩個步驟來估計系統的狀態。算法的核心在于最小化估計誤差的方差,從而提供最優的狀態估計。 預測步驟 :基于系統的動態模型
2024-12-16 09:08:371890 卡爾曼濾波在信號處理中的應用十分廣泛,其強大的濾波和預測能力使其成為信號處理領域的一種重要工具。以下是對卡爾曼濾波在信號處理中應用的分析: 一、卡爾曼濾波的基本原理 卡爾曼濾波是一種遞歸估計算法
2024-12-16 09:14:234121 ,給出當前狀態的最優估計,該算法涉及的核心方程有: 其中,xt為系統狀態矩陣;zt為系統觀測矩陣(實驗結果);A為狀態轉移矩陣;B為控制輸入矩陣;H為狀態觀測矩陣。 附2、卡爾曼濾波應用實例? 本部分通過簡單的算例,介紹了
2025-01-08 10:26:252153 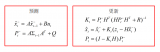
 電子發燒友App
電子發燒友App








 分別表示狀態基于傳感器i 觀測信息的Kalman 濾波估計值和相應的估計誤差協方差陣, 對于i=1 ,2,…,N, 假設
分別表示狀態基于傳感器i 觀測信息的Kalman 濾波估計值和相應的估計誤差協方差陣, 對于i=1 ,2,…,N, 假設 不相關, 則最優聯邦濾波器最優數據融合準則由下式給出:
不相關, 則最優聯邦濾波器最優數據融合準則由下式給出:



 的估計誤差協方差。
的估計誤差協方差。


 ,其中
,其中 和
和










 工商網監
工商網監
評論