目前視覺(jué)方案做ADAS既有雙目也有單目,兩者在距離檢測(cè)上用了不同的技術(shù)路線,產(chǎn)品化時(shí)也存在各自優(yōu)缺點(diǎn),對(duì)此作者談了談自己的看法。
2016-12-30 14:48:18 5585
5585 
特征扭曲是光流估計(jì)的核心技術(shù),然而扭曲過(guò)程中由遮擋區(qū)域引起的模糊性是一個(gè)尚未解決的主要問(wèn)題。圖像扭曲導(dǎo)致遮擋區(qū)域的模糊,在特征扭曲過(guò)程中也存在同樣的問(wèn)題,這些區(qū)域可以在沒(méi)有任何明確監(jiān)督的情況下被掩蓋。
2022-09-08 11:49:353047 本文提出了一種適用于任意數(shù)據(jù)模態(tài)的自監(jiān)督學(xué)習(xí)數(shù)據(jù)增強(qiáng)技術(shù)。 ? 自監(jiān)督學(xué)習(xí)算法在自然語(yǔ)言處理、計(jì)算機(jī)視覺(jué)等領(lǐng)域取得了重大進(jìn)展。這些自監(jiān)督學(xué)習(xí)算法盡管在概念上是通用的,但是在具體操作上是基于特定的數(shù)據(jù)
2023-09-04 10:07:041731 
鋪設(shè)異常檢測(cè)可以幫助減少數(shù)據(jù)存儲(chǔ)、傳輸、標(biāo)記和處理的壓力。本論文描述了一種基于Transformer和自監(jiān)督學(xué)習(xí)的新方法,有助于定位異常區(qū)域。
2023-12-06 14:57:102892 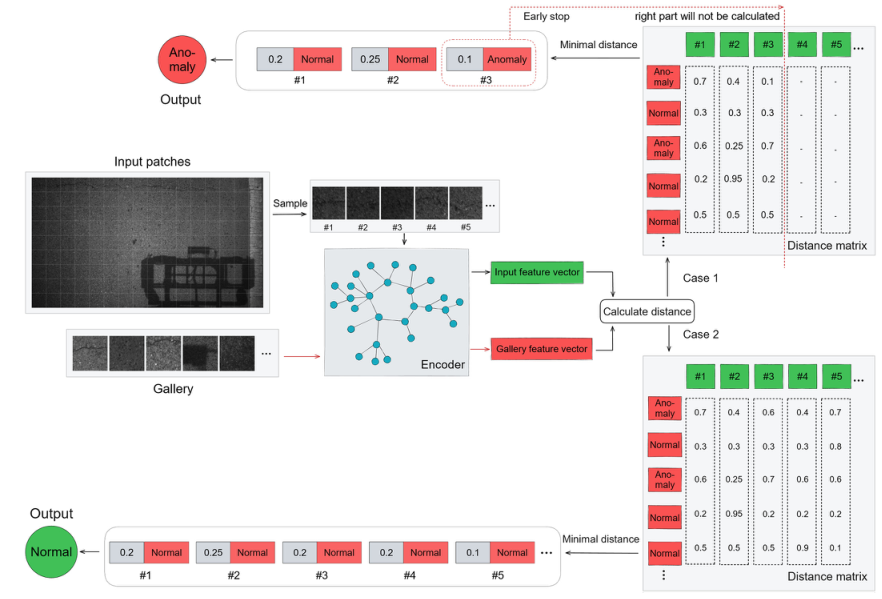
地平線在軟件算法上提供了基于深度學(xué)習(xí)的整體方案,具有高性能、低運(yùn)算量的特點(diǎn)。在今年智車優(yōu)行“奇點(diǎn)汽車”發(fā)布會(huì)上,地平線首次向外界展示了真車環(huán)境下,利用單目攝像頭同時(shí)實(shí)現(xiàn)行人/車輛/車道線檢測(cè)的ADAS產(chǎn)品
2017-01-06 18:09:34
描述該參考設(shè)計(jì)是單芯片充電和動(dòng)態(tài)電源路徑管理 IC 解決方案。這是基于 bq24030 的全套電路設(shè)計(jì),為評(píng)估 IC 的運(yùn)行和性能提供了便利方法。開發(fā)解決方案中包括已經(jīng)過(guò)測(cè)試的評(píng)估板、用戶指南(包含
2022-09-16 07:35:49
供電范圍
1.8V – 15V
兼容單節(jié)/多節(jié)電池及超級(jí)電容輸入,支持深度放電場(chǎng)景
參考電壓精度
0.5V ±2%
確保輸出電壓精度,降低后端LDO調(diào)整壓力
動(dòng)態(tài)功耗管理
工作模式5.5mA / 待機(jī)1
2025-06-24 08:47:48
,可以更智能地應(yīng)用于計(jì)算機(jī)視覺(jué)的相關(guān)領(lǐng)域中。方案搭建Firefly RK3399Pro開源主板 + 單目攝像頭方案特點(diǎn)高性能AI處理器采用RK3399Pro高性能AI主板,ARM六核處理器架構(gòu),主頻
2022-04-01 15:55:16
PTR5415是基于Nordic最新nRF54L15芯片,專為物聯(lián)網(wǎng)和工業(yè)場(chǎng)景設(shè)計(jì)。
1、核心參數(shù)與硬件優(yōu)勢(shì)
芯片與協(xié)議:搭載nRF54L15SoC,支持藍(lán)牙6.0、LEAudio、Thread
2025-03-11 16:03:40
STM32 編譯后不能運(yùn)行項(xiàng)目場(chǎng)景:?jiǎn)栴}描述:原因分析:解決方案:不能運(yùn)行的其他幾個(gè)原因:項(xiàng)目場(chǎng)景:Keil MDK中創(chuàng)建STM32F103項(xiàng)目,可以編譯下載,但程序不能正常運(yùn)行。問(wèn)題描述:仿真調(diào)試
2021-08-24 07:32:09
低空飛行器電機(jī)(如 eVTOL、無(wú)人機(jī)、工業(yè)級(jí)飛行器等的驅(qū)動(dòng)電機(jī))對(duì)功率密度、輕量化、可靠性、動(dòng)態(tài)響應(yīng)的要求遠(yuǎn)超地面設(shè)備電機(jī),而自粘結(jié)鐵芯方案通過(guò)結(jié)構(gòu)革新、性能優(yōu)化與場(chǎng)景適配,解決了這些核心痛點(diǎn)
2025-08-06 11:25:51
通信技術(shù)發(fā)展的日新月異,對(duì)深度覆蓋的要求越來(lái)越高.什么是TD-LTE深度覆蓋解決方案?這些方案有什么優(yōu)勢(shì)?
2019-08-14 07:35:24
摘要:深度學(xué)習(xí)是一個(gè)既可以處理特征、學(xué)習(xí)特征又可以實(shí)現(xiàn)最后的排序打分的一套整體解決方案,借助深度學(xué)習(xí)的解決方案,搜索推薦的工作方式將發(fā)生巨大的變化。想知道阿里巴巴如何將在搜索推薦領(lǐng)域下應(yīng)用深度學(xué)習(xí)
2018-05-08 16:28:04
在微功耗場(chǎng)景下,使用RCC是否比低功耗芯片的效率更高?設(shè)計(jì)例子:單火取電項(xiàng)目,從AC線取電取電,交流220V轉(zhuǎn)直流12V,再通過(guò)DC-DC方案,將12V轉(zhuǎn)為3.3V供Zigbee工作,該Zigbee
2016-06-17 13:50:42
的單目內(nèi)窺鏡定位系統(tǒng)設(shè)計(jì)(下)
導(dǎo)讀
隨著現(xiàn)科技的發(fā)展和社會(huì)的進(jìn)步,信息科技迅速發(fā)展,我們可從互聯(lián)網(wǎng)、電臺(tái)等媒體獲取大量信息。現(xiàn)代信息的存儲(chǔ)、處理和傳輸變得越來(lái)越數(shù)字化。在人們的日常生活中,常用
2023-06-27 20:42:56
GPU、FPGA等硬件加速。通過(guò)分析硬件加速器的性能參數(shù),可以估算模型在硬件加速下的計(jì)算量。
四、實(shí)驗(yàn)與分析
為了驗(yàn)證上述估計(jì)方法的有效性,我們選取了幾個(gè)具有代表性的深度學(xué)習(xí)模型,在多個(gè)硬件平臺(tái)
2025-07-03 19:43:59
求助 自平衡智能小車制作方案
2013-07-21 22:49:51
【深度學(xué)習(xí)基礎(chǔ)-17】非監(jiān)督學(xué)習(xí)-Hierarchical clustering 層次聚類-python實(shí)現(xiàn)
2020-04-28 10:07:39
求助大神,請(qǐng)問(wèn)若想求采集的振動(dòng)信號(hào)的自回歸模型估計(jì)(AR譜估計(jì))來(lái)確定頻譜中譜峰出的中心頻率,該怎么編程???
2018-04-26 10:37:26
背景建模一直是運(yùn)動(dòng)目標(biāo)檢測(cè)中的一個(gè)重要課題。該文提出一個(gè)適用于動(dòng)態(tài)背景的基于非參數(shù)估計(jì)的前景背景對(duì)比模型。模型通過(guò)核函數(shù)估計(jì)的方法模擬了像素點(diǎn)五維特征向量(彩色
2009-04-08 08:52:18 18
18 運(yùn)動(dòng)員姿態(tài)的計(jì)算是非常困難的并且有很多應(yīng)用。在本文中,我們主要針對(duì)運(yùn)動(dòng)員身體傾角,提出了一種基于單目攝像機(jī)的幾何計(jì)算方法。首先,利用針孔模型對(duì)場(chǎng)景進(jìn)行3d 重建
2009-08-12 08:41:129 單載波MIMO 系統(tǒng)的頻域均衡是對(duì)抗信道頻率選擇性衰落的有效方法,它的良好性能依賴于接收端準(zhǔn)確的信道估計(jì)(Channel Estimation,CE)。常見(jiàn)的迫零信道估計(jì)(ZF-CE)在導(dǎo)頻頻域非恒包絡(luò)
2009-08-22 09:24:1728 單管動(dòng)態(tài)MOS存儲(chǔ)單元
2009-12-04 16:50:244158 本文CameraCalibrator類源代碼來(lái)自于OpenCV2 計(jì)算機(jī)視覺(jué)編程手冊(cè)(Robert Laganiere 著 張靜 譯) 強(qiáng)烈建議閱讀機(jī)器視覺(jué)學(xué)習(xí)筆記(4)——單目攝像機(jī)標(biāo)定參數(shù)
2017-02-08 03:36:381195 基于單目深度估計(jì)的紅外圖像彩色化方法_戈曼
2017-03-17 10:13:010 K3項(xiàng)目實(shí)施方案書
2017-09-08 11:00:205 針對(duì)場(chǎng)景標(biāo)注中如何產(chǎn)生良好的內(nèi)部視覺(jué)信息表達(dá)和有效利用上下文語(yǔ)義信息兩個(gè)至關(guān)重要的問(wèn)題,提出一種基于深度學(xué)習(xí)的多尺度深度網(wǎng)絡(luò)監(jiān)督模型。與傳統(tǒng)多尺度方法不同,模型主要由兩個(gè)深度卷積網(wǎng)絡(luò)組成:首先網(wǎng)絡(luò)
2017-11-28 14:22:100 針對(duì)現(xiàn)有的選擇精度主動(dòng)學(xué)習(xí)停止準(zhǔn)則僅適用于批量樣例標(biāo)注場(chǎng)景這一問(wèn)題,提出了一種適用于單輪單樣例標(biāo)注場(chǎng)景的改進(jìn)的選擇精度停止準(zhǔn)則。該準(zhǔn)則通過(guò)監(jiān)督自本輪起前溯的固定學(xué)習(xí)輪次內(nèi)的預(yù)測(cè)標(biāo)記與真實(shí)標(biāo)記間的匹配
2017-12-27 15:26:040 海目星激光成立于2008年,是國(guó)內(nèi)激光和自動(dòng)化綜合解決方案領(lǐng)先提供商,是集研發(fā)、制造、銷售、服務(wù)于一體的國(guó)家級(jí)高新技術(shù)企業(yè)。經(jīng)過(guò)激光、自動(dòng)化等多個(gè)領(lǐng)域的技術(shù)沉淀和客戶服務(wù)經(jīng)驗(yàn)積累,海目星激光與國(guó)內(nèi)動(dòng)力電池企業(yè)達(dá)成深度合作。
2017-12-31 00:47:285178 針對(duì)張正友標(biāo)定方法中相機(jī)內(nèi)參數(shù)的求解可能陷入局部最優(yōu)解的問(wèn)題,考慮鏡頭的三階徑向畸變和二階離心畸變,提出一種基于改進(jìn)遺傳算法的單目相機(jī)內(nèi)參數(shù)優(yōu)化標(biāo)定方案。該方法可顯著提高相機(jī)標(biāo)定中內(nèi)參數(shù)的精度,并能避免陷入局部最優(yōu)。最后,實(shí)驗(yàn)驗(yàn)證了所提方案的有效性和可行性。
2018-01-05 16:11:492 2017年因蘋果發(fā)行的iPhone X手機(jī)開始開啟起了人臉識(shí)別技術(shù)的爆發(fā)年。隨著這項(xiàng)技術(shù)逐漸成熟,相關(guān)的臉識(shí)別技術(shù)公司也紛紛涌出。其中神目公司格外的令人注意。針對(duì)市場(chǎng)需求,神目已將人臉識(shí)別、物體識(shí)別、車輛識(shí)別等技術(shù)應(yīng)用實(shí)踐,推出相對(duì)應(yīng)的解決方案。
2018-01-20 10:01:051457 單目運(yùn)算符是指運(yùn)算所需變量為一個(gè)的運(yùn)算符,又叫一元運(yùn)算符,其中有邏輯非運(yùn)算符:!、按位取反運(yùn)算符:~、自增自減運(yùn)算符:++, --等。
2018-02-24 15:42:4861650 
針對(duì)均勻線性陣列DOA估計(jì)中的實(shí)時(shí)性和解相干問(wèn)題,提出了一種基于單次快拍數(shù)據(jù)的估計(jì)算法,通過(guò)對(duì)陣列接收的單次快拍數(shù)據(jù)進(jìn)行相關(guān)處理后重構(gòu)Toeplitz矩陣,并證明該矩陣的秩不受信號(hào)相干性的影響。通過(guò)
2018-03-06 10:57:380 噪聲功率譜估計(jì)是語(yǔ)音增強(qiáng)算法的基本組成部分,傳統(tǒng)算法大多采用啟發(fā)式的估計(jì)方法,因而不能保證噪聲估計(jì)值的統(tǒng)計(jì)最優(yōu)。提出了一種基于極大似然的非監(jiān)督噪聲功率譜估計(jì)方法,采用隱馬爾可夫模型( Hidden
2018-03-07 10:14:371 本文將主要介紹深度學(xué)習(xí)模型在美團(tuán)平臺(tái)推薦排序場(chǎng)景下的應(yīng)用和探索。
2018-04-02 09:28:1221691 
雙目匹配需要把左圖像素和右圖中其對(duì)應(yīng)像素進(jìn)行匹配,再由匹配的像素差算出左圖像素對(duì)應(yīng)的深度,而之前的單目深度估計(jì)方法均不能顯式引入類似的幾何約束。由于深度學(xué)習(xí)模型的引入,雙目匹配算法的性能近年來(lái)得到了極大的提升。
2018-06-04 15:46:4935978 
器,從單目圖像中預(yù)測(cè)動(dòng)作。雖然在訓(xùn)練該估計(jì)器的時(shí)候需要標(biāo)注動(dòng)作,不過(guò)一旦訓(xùn)練完成,估計(jì)器在應(yīng)用到新圖片上時(shí)就無(wú)需再次訓(xùn)練了。
2018-10-12 09:06:293329 本文將重點(diǎn)介紹單目方案的空間定位。 三、單目三維空間測(cè)量與定位要解決的問(wèn)題 1、 求解原理和過(guò)程 如前文所述,單目三維空間測(cè)量與定位,是依據(jù)PnP原理來(lái)求解的。理論上講,如果可以獲取一個(gè)三維剛體上不
2018-10-16 14:54:0011904 對(duì)單目來(lái)說(shuō)物體越遠(yuǎn),測(cè)距的精度越低,硬件上的缺點(diǎn)可以通過(guò)算法去彌補(bǔ),近日有兩篇關(guān)于單目視覺(jué)的研究論文曝光,一篇是單目視頻的深度估計(jì),另一篇?jiǎng)t是單目3d物體識(shí)別,在數(shù)據(jù)集下測(cè)試都取得了不錯(cuò)的效果,我們熟悉的單目攝像頭可能一直被低估了。
2018-11-29 17:25:504257 對(duì)單目來(lái)說(shuō)物體越遠(yuǎn),測(cè)距的精度越低,硬件上的缺點(diǎn)可以通過(guò)算法去彌補(bǔ),近日有兩篇關(guān)于單目視覺(jué)的研究論文曝光,一篇是單目視頻的深度估計(jì),另一篇?jiǎng)t是單目3d物體識(shí)別,在數(shù)據(jù)集下測(cè)試都取得了不錯(cuò)的效果,我們熟悉的單目攝像頭可能一直被低估了。
2018-12-01 11:13:534371 單目眼鏡這個(gè)單目反人性的設(shè)計(jì),會(huì)嚴(yán)重影響使用者的眼睛健康。輕則近視,重則引發(fā)各類眼科疾病。試想,單目眼鏡使用者如果用于工作,則大部分場(chǎng)景一只眼睛一年少則看上千個(gè)小時(shí),多則幾千個(gè)小時(shí),這只眼睛里不廢了才怪。
2019-04-09 10:13:228196 無(wú)需相機(jī)參數(shù)、單目、以無(wú)監(jiān)督學(xué)習(xí)的方式從未標(biāo)記場(chǎng)景視頻中搞定深度圖!
2019-04-29 15:38:453001 下圖展示了這種方法的主要流程,首先需要從圖像中抽取目標(biāo)和對(duì)應(yīng)的反射區(qū)域,而后對(duì)特征進(jìn)行匹配,并基于這些信息進(jìn)行水面法向量估計(jì)和和反射場(chǎng)景的輻射估計(jì),最后進(jìn)行立體匹配和深度計(jì)算;針對(duì)有波紋的水面,還需要對(duì)波浪進(jìn)行一定的矯正和三維波浪形狀估計(jì)。
2019-08-02 14:54:535086 
本文提出了一種自監(jiān)督同變注意力機(jī)制(self-supervised equivariant attention mechanism,簡(jiǎn)稱SEAM),利用自監(jiān)督方法來(lái)彌補(bǔ)監(jiān)督信號(hào)差異。在強(qiáng)監(jiān)督語(yǔ)義分割的數(shù)據(jù)增廣階段,像素層級(jí)標(biāo)注和輸入圖像需經(jīng)過(guò)相同的仿射變換
2020-05-12 10:16:138561 
選擇更具性價(jià)比的人臉識(shí)別模組。 介紹一下單目攝像頭,單目攝像頭定義通過(guò)單目算法將實(shí)時(shí)非結(jié)構(gòu)化的視頻數(shù)據(jù)解析成結(jié)構(gòu)化的數(shù)據(jù),基于人的臉部特征,判斷輸入的人臉圖像或者視頻是否存在人臉 ,進(jìn)而抓取面部關(guān)鍵信息的定位,分析獲取性別
2020-06-18 14:38:4531510 然而,該技術(shù)也存在缺點(diǎn):單目攝像頭的測(cè)距精度取決于深度學(xué)習(xí)訓(xùn)練的場(chǎng)景數(shù)據(jù),因此對(duì)于不同場(chǎng)景中拍攝的圖像,測(cè)距精度會(huì)大大降低。為了消除對(duì)這些數(shù)據(jù)的依賴性,東芝開發(fā)了一種分色濾鏡(color-filtered aperture)拍攝技術(shù)。
2020-08-03 10:31:283647 
2020年,疫情的爆發(fā)與新基建的提出給眾多產(chǎn)業(yè)帶來(lái)了挑戰(zhàn)和機(jī)遇。基于今年的大環(huán)境,自連電子科技(上海)有限公司(以下簡(jiǎn)稱“自連科技”)發(fā)布了面向大健康和新基建等新賽道的全場(chǎng)景物聯(lián)網(wǎng)解決方案及應(yīng)用產(chǎn)品
2020-09-23 16:52:172435 針對(duì)在傳統(tǒng)機(jī)器學(xué)習(xí)方法下單幅圖像深度估計(jì)效果差、深度值獲取不準(zhǔn)確的問(wèn)題,提出了一種基于多孔卷積神經(jīng)網(wǎng)絡(luò)(ACNN)的深度估計(jì)模型。首先,利用卷積神經(jīng)網(wǎng)絡(luò)(CNN)逐層提取原始圖像的特征圖;其次,利用
2020-09-29 16:20:005 將在明年5月4日舉行,目前,本次大會(huì)投稿已經(jīng)結(jié)束,最后共有3013篇論文提交。ICLR 采用公開評(píng)審機(jī)制,任何人都可以提前看到這些論文。 為了分析最新研究動(dòng)向,我們精選了涵蓋自監(jiān)督
2020-11-02 15:50:563180 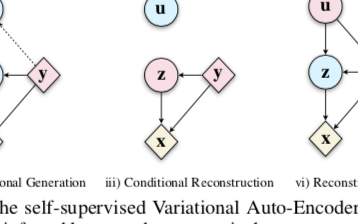
詳細(xì)解析,幫助大家選擇更具性價(jià)比的人臉識(shí)別模組。 首先介紹一下單目攝像頭,單目攝像頭定義通過(guò)單目算法將實(shí)時(shí)非結(jié)構(gòu)化的視頻數(shù)據(jù)解析成結(jié)構(gòu)化的數(shù)據(jù),基于人的臉部特征,判斷輸入的人臉圖像或者視頻是否存在人臉 ,進(jìn)而抓取面部關(guān)鍵信
2021-02-26 14:32:1812251 同時(shí)定位與地圖構(gòu)建(SLAM)作為機(jī)器人領(lǐng)域的硏究熱點(diǎn),近年來(lái)取得了快速發(fā)展,但多數(shù)SLAM方法未考慮應(yīng)用場(chǎng)景中的動(dòng)態(tài)或可移動(dòng)目標(biāo)。針對(duì)該問(wèn)題,提出一種適用于動(dòng)態(tài)場(chǎng)景的SLAM方法。將基于深度學(xué)習(xí)
2021-03-18 10:39:3921 為改善單目圖像語(yǔ)義分割網(wǎng)絡(luò)對(duì)圖像深度變化區(qū)域的分割效果,提出一種結(jié)合雙目圖像的深度信息和跨層次特征進(jìn)行互補(bǔ)應(yīng)用的語(yǔ)義分割模型。在不改變已有單目孿生網(wǎng)絡(luò)結(jié)構(gòu)的前提下,利用該模型分別提取雙目左、右輸入
2021-03-19 14:35:2421 基于深度學(xué)習(xí)的二維人體姿態(tài)估計(jì)方法通過(guò)構(gòu)建特定的神經(jīng)網(wǎng)絡(luò)架構(gòu),將提取的特征信息根據(jù)相應(yīng)的特征融合方法進(jìn)行信息關(guān)聯(lián)處理,最終獲得人體姿態(tài)估計(jì)結(jié)果,因其具有廣泛的應(yīng)用價(jià)值而受到研究人員的關(guān)注。從數(shù)據(jù)集
2021-03-22 15:51:155 自監(jiān)督學(xué)習(xí)讓 AI 系統(tǒng)能夠從很少的數(shù)據(jù)中學(xué)習(xí)知識(shí),這樣才能識(shí)別和理解世界上更微妙、更不常見(jiàn)的表示形式。
2021-03-30 17:09:356769 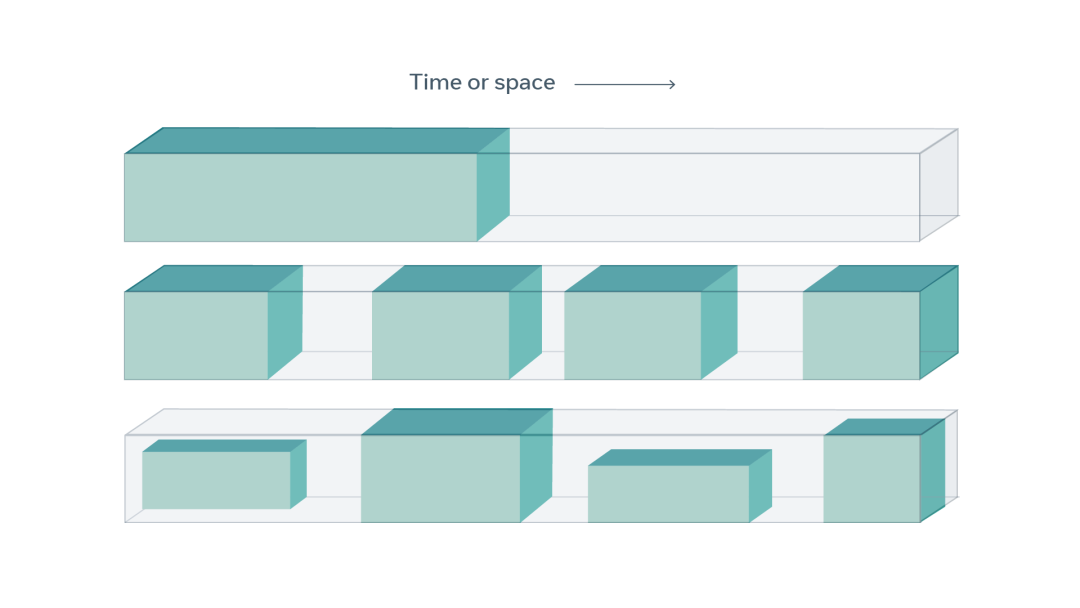
這里舉個(gè)例子,CV中有一個(gè)很具有挑戰(zhàn)性的任務(wù)是3D from Monocular Vision,即從單目圖像進(jìn)行三維重建與感知。目前很多方案都是通過(guò)強(qiáng)監(jiān)督學(xué)習(xí)方式直接對(duì)深度信息進(jìn)行預(yù)測(cè)或者直接在2D圖像上進(jìn)行3D任務(wù)。
2021-04-18 10:34:404140 
為了提高利用深度神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)單圖像深度信息的精確度,提出了一種采用自監(jiān)督卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行單圖像深度估計(jì)的方法。首先,該方法通過(guò)在編解碼結(jié)構(gòu)中引入殘差結(jié)構(gòu)、密集連接結(jié)構(gòu)和跳躍連接等方式改進(jìn)了單圖像深度
2021-04-27 16:06:3513 近年來(lái)人體姿態(tài)估計(jì)作為計(jì)算機(jī)視覺(jué)領(lǐng)域的熱點(diǎn),在視頻監(jiān)控、人機(jī)交互、智慧校園等領(lǐng)域具有廣泛的應(yīng)用前景。隨著神經(jīng)網(wǎng)絡(luò)的快速發(fā)展,采用深度學(xué)習(xí)方法進(jìn)行二維人體姿態(tài)估計(jì),相較于傳統(tǒng)需要人工設(shè)定特征的方法
2021-04-27 16:16:077 結(jié)合基擴(kuò)展模型和深度學(xué)習(xí)的信道估計(jì)方法
2021-06-30 10:43:3963 車輛系統(tǒng)動(dòng)態(tài)高級(jí)估計(jì)技術(shù)綜述
2021-07-18 09:19:210 監(jiān)督學(xué)習(xí)|機(jī)器學(xué)習(xí)| 集成學(xué)習(xí)|進(jìn)化計(jì)算| 非監(jiān)督學(xué)習(xí)| 半監(jiān)督學(xué)習(xí)| 自監(jiān)督學(xué)習(xí)|?無(wú)監(jiān)督學(xué)習(xí)| 隨著人工智能、元宇宙、數(shù)據(jù)安全、可信隱私用計(jì)算、大數(shù)據(jù)等領(lǐng)域的快速發(fā)展,自監(jiān)督學(xué)習(xí)脫穎而出,致力于
2022-01-20 10:52:105490 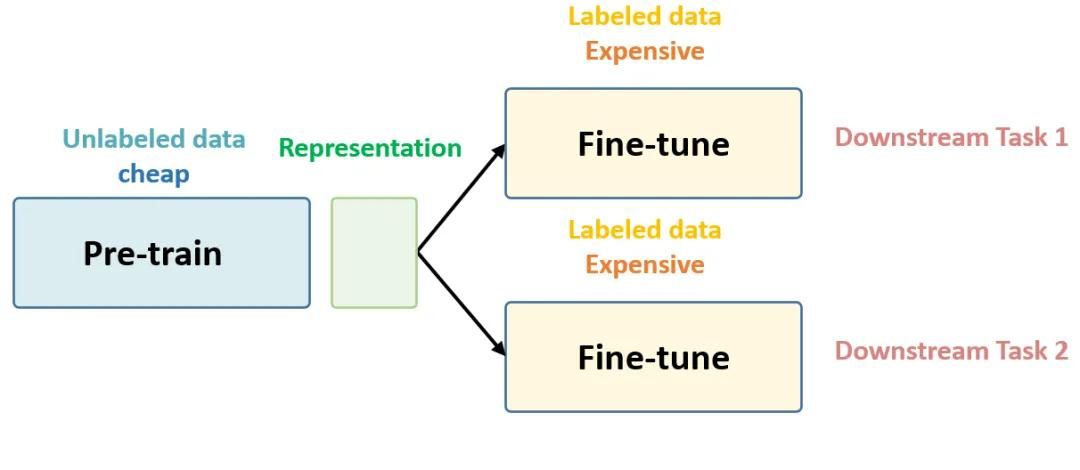
自監(jiān)督學(xué)習(xí)的流行是勢(shì)在必然的。在各種主流有監(jiān)督學(xué)習(xí)任務(wù)都做到很成熟之后,數(shù)據(jù)成了最重要的瓶頸。從無(wú)標(biāo)注數(shù)據(jù)中學(xué)習(xí)有效信息一直是...
2022-01-26 18:50:171 目前,基于深度學(xué)習(xí)的視覺(jué)檢測(cè)在監(jiān)督學(xué)習(xí)方法的幫助下取得了很大的成功。然而,在實(shí)際工業(yè)場(chǎng)景中,缺陷樣本的稀缺性、注釋成本以及缺陷先驗(yàn)知識(shí)的缺乏可能會(huì)導(dǎo)致基于監(jiān)督的方法失效。
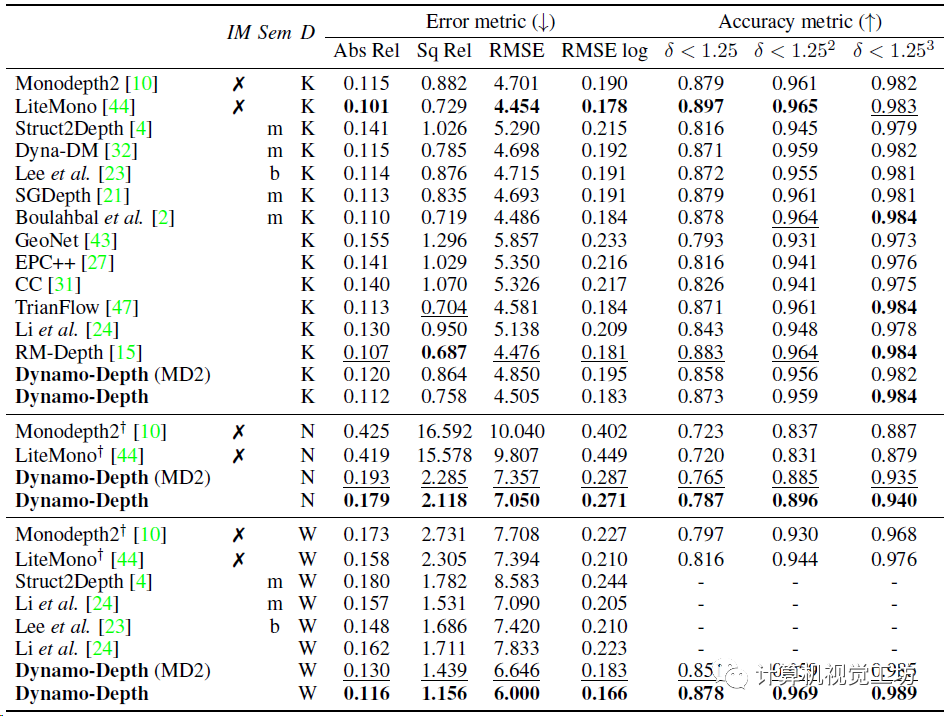
2022-07-31 11:00:524060 雖然近年來(lái)無(wú)監(jiān)督單目深度學(xué)習(xí)取得了很大的進(jìn)展,但仍然存在一些基本問(wèn)題。首先,目前的方法存在尺度模糊性問(wèn)題,因?yàn)榉赐七^(guò)程對(duì)于深度和平移來(lái)說(shuō)相當(dāng)于任意尺度因子。
2022-09-07 09:50:221638 我們?cè)O(shè)計(jì)的單目深度估計(jì)網(wǎng)絡(luò)FastDepth主要由卷積構(gòu)成,主要由編碼器-解碼器兩部分組成。編碼器從輸入圖像中提取高層次低分辨率特征。然后將這些特征輸入解碼器,在解碼器中對(duì)它們進(jìn)行逐步的上采樣、細(xì)化和合并,以形成最終的高分辨率輸出深度圖。
2022-09-26 09:34:392267 基于幾何的單目3D目標(biāo)檢測(cè)通過(guò)2D-3D投影約束估計(jì)目標(biāo)的位置。具體來(lái)說(shuō),網(wǎng)絡(luò)預(yù)測(cè)目標(biāo)的尺寸(),旋轉(zhuǎn)角。假設(shè)一個(gè)目標(biāo)有n個(gè)語(yǔ)義關(guān)鍵點(diǎn),論文回歸第i個(gè)關(guān)鍵點(diǎn)在圖像坐標(biāo)中的2D坐標(biāo)和object
2022-10-09 15:51:321675 作為最簡(jiǎn)單直接且不需要點(diǎn)云標(biāo)簽的三維場(chǎng)景重建方式,在這個(gè)工作中我們重點(diǎn)研究自監(jiān)督環(huán)視深度估計(jì)這個(gè)任務(wù)。
2022-10-10 16:53:061714 隨著深度學(xué)習(xí)的興起,深度半監(jiān)督學(xué)習(xí)算法也取得了長(zhǎng)足的進(jìn)步。同時(shí),包括Google、Meta和微軟等在內(nèi)的科技巨頭也認(rèn)識(shí)到了半監(jiān)督學(xué)習(xí)在實(shí)際場(chǎng)景中的巨大潛力。
2022-10-19 15:52:01982 我們提出了一種利用深度密集單目 SLAM 和快速不確定性傳播從圖像重建 3D 場(chǎng)景的新方法。所提出的方法能夠密集、準(zhǔn)確、實(shí)時(shí)地 3D 重建場(chǎng)景,同時(shí)對(duì)來(lái)自密集單目 SLAM 的極其嘈雜的深度估計(jì)具有魯棒性。
2023-01-30 11:34:221235 確定移動(dòng)機(jī)器人的狀態(tài)是機(jī)器人導(dǎo)航系統(tǒng)中重要的組成部分。在本文中,我們提出了一種使用2D激光雷達(dá)在室內(nèi)場(chǎng)景下估計(jì)機(jī)器人姿態(tài)的方法,并探討了如何將新型的場(chǎng)景表示模型整合到標(biāo)準(zhǔn)蒙特卡羅定位(MCL)系統(tǒng)中。
2023-02-08 09:46:062184 一般而言,單目是無(wú)法依靠自身來(lái)完成測(cè)量的,有企業(yè)選擇讓單目相機(jī)動(dòng)起來(lái),但是一旦動(dòng)起來(lái)實(shí)際上也是雙目,不再是單目。其實(shí)單目最大的問(wèn)題是缺少了深度信息。近大遠(yuǎn)小是我們最常用的成像規(guī)律,近處物體在視場(chǎng)中占比大,遠(yuǎn)處物體在視場(chǎng)中占比小。
2023-03-01 11:19:432168 自監(jiān)督單目深度估計(jì)不需要地面實(shí)況訓(xùn)練,近年來(lái)受到廣泛關(guān)注。設(shè)計(jì)輕量級(jí)但有效的模型非常有意義,這樣它們就可以部署在邊緣設(shè)備上。
2023-03-14 17:54:163577 單目深度估計(jì)分為兩個(gè)派系,metric depth estimation(度量深度估計(jì),也稱絕對(duì)深度估計(jì))和relative depth estimation(相對(duì)深度估計(jì))。
2023-03-21 18:01:258456 AI 技術(shù)與通信網(wǎng)絡(luò)的硬件、軟件、系統(tǒng)等深度融合,助 力使能業(yè)務(wù)敏捷創(chuàng)新、網(wǎng)絡(luò)運(yùn)營(yíng)智能、構(gòu)建智慧內(nèi)生網(wǎng)絡(luò)。 自智網(wǎng)絡(luò)圍繞“單域自治,跨域協(xié)同”的核心思想,分層次構(gòu)建 體系化能力,實(shí)現(xiàn)全場(chǎng)景網(wǎng)絡(luò)自動(dòng)化和智能化,其目
2023-03-29 16:30:571 ? ? 本文提出了一種生產(chǎn)化的端到端立體深度感知系統(tǒng)設(shè)計(jì),可以完成預(yù)處理、在線立體校正和立體深度估計(jì),并支持糾偏失敗后的單目深度估計(jì)備選方案。同時(shí),該深度感知系統(tǒng)的輸出應(yīng)用于一種基于智能眼鏡拍攝
2023-05-26 16:12:001354 
在自動(dòng)駕駛感知算法中,有一個(gè)重要的分支是單目視覺(jué)檢測(cè),在檢測(cè)目標(biāo)是單目相機(jī)最困難的地方在于恢復(fù)目標(biāo)物的深度信
息,無(wú)論使用小孔成像還是逆透視變換等方法都無(wú)法做到任意場(chǎng)景的魯棒,并且在遠(yuǎn)距離也有較好
2023-06-07 11:48:350 我的論文方向目前是使用單目攝像頭實(shí)現(xiàn)機(jī)器人對(duì)人的跟隨,首先單目攝像頭與kinect等深度攝像頭最大的區(qū)別是無(wú)法有效獲取深度信息,那就首先從這方面入手,嘗試通過(guò)圖像獲取攝像頭與人的距離。
2023-07-03 10:01:474170 
安裝數(shù)量為1-3個(gè),即對(duì)應(yīng)為單目、雙目和三目的方案,配置上可滿足更寬的視野、更深度的感知能力,并具有高動(dòng)態(tài)范圍。以三目方案為例,分別為前視寬視野、主視野、窄視野的方式(搭配不同HFOV鏡頭)。
2023-07-06 16:42:261592 
本文討論常用的電源路徑管理方案,即動(dòng)態(tài)電源路徑管理(DPPM)。DPPM控制回路可以根據(jù)輸入源的電流能力和負(fù)載電流水平動(dòng)態(tài)調(diào)整充電電流,以實(shí)現(xiàn)給定電源和系統(tǒng)負(fù)載下的最短充電時(shí)間。有了DPPM,即使電池已深度放電,系統(tǒng)也可以在接入輸入源后立即獲得電力。另外,本文還討論了系統(tǒng)電壓的調(diào)節(jié)方法。
2023-07-12 15:18:391917 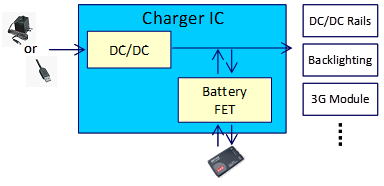
大型語(yǔ)言模型如 ChatGPT 的成功彰顯了海量數(shù)據(jù)在捕捉語(yǔ)言模式和知識(shí)方面的巨大潛力,這也推動(dòng)了基于大量數(shù)據(jù)的視覺(jué)模型研究。在計(jì)算視覺(jué)領(lǐng)域,標(biāo)注數(shù)據(jù)通常難以獲取,自監(jiān)督學(xué)習(xí)成為預(yù)訓(xùn)練的主流方法
2023-07-24 16:55:031232 
我們非常高興地發(fā)布一個(gè)新的代碼示例,展示虹科AI深度相機(jī)SDK的驚人功能。只需6行源代碼,您就可以實(shí)時(shí)準(zhǔn)確地估計(jì)和跟蹤人體姿態(tài)!我們最新的代碼示例使用AI機(jī)器學(xué)習(xí)技術(shù)來(lái)識(shí)別和跟蹤人體的關(guān)鍵點(diǎn),使您能
2023-07-31 17:42:261791 
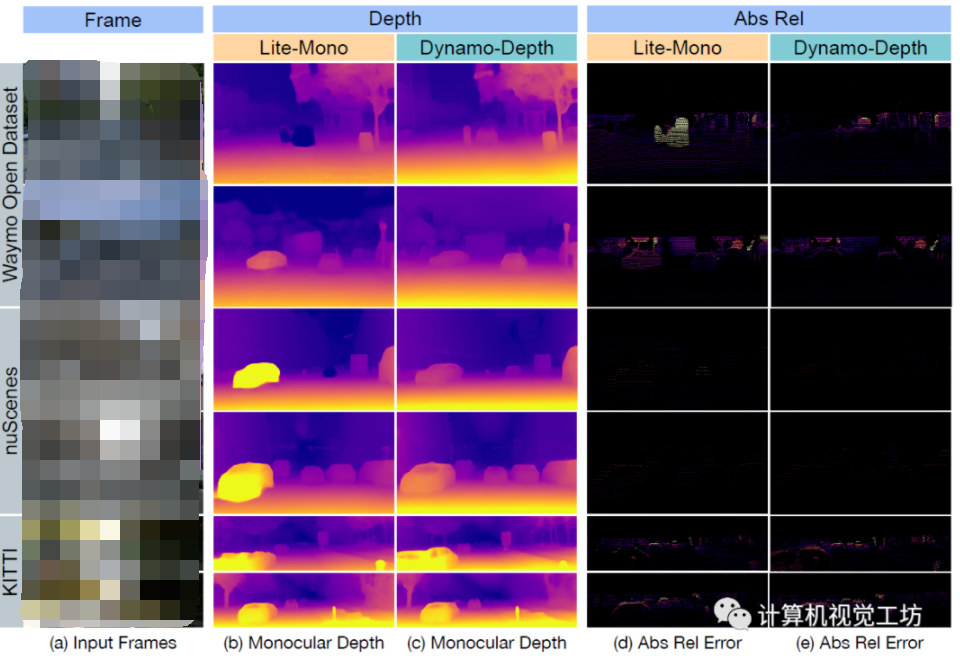
在這些情況下, 傳感器自帶的噪聲、無(wú)紋理的黑暗區(qū)域和反光等不利因素都違反了基于監(jiān)督和自監(jiān)督學(xué)習(xí)方法的訓(xùn)練假設(shè)。自監(jiān)督方法無(wú)法建立學(xué)習(xí)深度所需的像素的對(duì)應(yīng)關(guān)系,而監(jiān)督方法則可能從傳感器真值中(如上圖中的 LiDAR 與 nuScenes 的數(shù)據(jù)樣本)中學(xué)習(xí)到數(shù)據(jù)瑕疵。
2023-09-04 16:14:201275 
操作域監(jiān)督(ODS) 操作域監(jiān)督功能模塊圖 操作域監(jiān)督模塊監(jiān)控與動(dòng)態(tài)駕駛?cè)蝿?wù)相關(guān)的能力、狀態(tài)和情況,目的是確保自動(dòng)駕駛車輛在操作設(shè)計(jì)域及其他適用的動(dòng)態(tài)和靜態(tài)約束下運(yùn)行。它使用兩個(gè)操作域表示實(shí)現(xiàn)運(yùn)行時(shí)
2023-10-04 18:19:001292 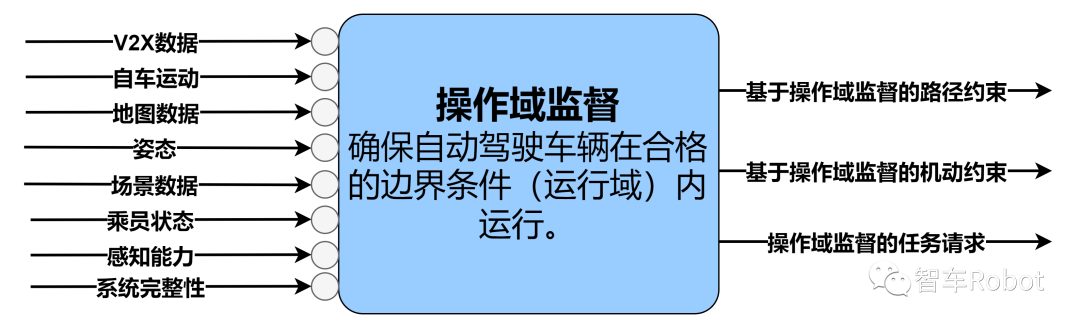
硬件系統(tǒng)的輕量化和降本是3D視覺(jué)市場(chǎng)演進(jìn)的必然趨勢(shì)。維悟光子通過(guò)底層原理的創(chuàng)新,僅利用單目CMOS相機(jī)(最簡(jiǎn)單的成像系統(tǒng))就可以獲取完整的3D信息。本次發(fā)布的單目紅外3D成像模組,主要面向機(jī)器人避障應(yīng)用,也能適用于生物識(shí)別等需要中近距離3D成像的場(chǎng)景。
2023-10-13 15:45:521604 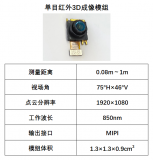
在RefCOCO/+/g、RefitGame和Flickr30K Entities這五個(gè)主流測(cè)試基準(zhǔn)中,我們的模型在單源和多源場(chǎng)景下的性能都明顯優(yōu)于SOTA無(wú)監(jiān)督定位方法Pseudo-Q,分別達(dá)到
2023-10-18 10:09:491734 本文方法是一種自監(jiān)督的單目深度估計(jì)框架,名為GasMono,專門設(shè)計(jì)用于室內(nèi)場(chǎng)景。本方法通過(guò)應(yīng)用多視圖幾何的方式解決了室內(nèi)場(chǎng)景中幀間大旋轉(zhuǎn)和低紋理導(dǎo)致自監(jiān)督深度估計(jì)困難的挑戰(zhàn)。
2023-11-06 11:47:08984 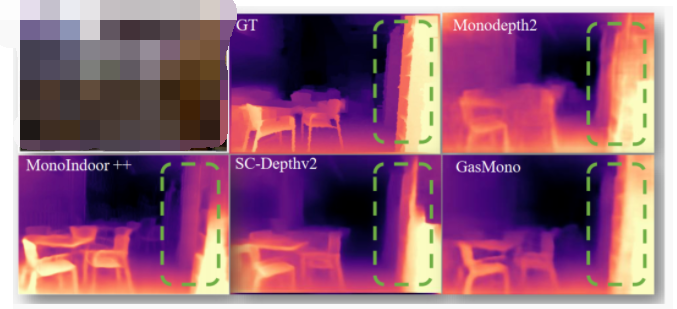
汽車必須接受全面的訓(xùn)練、測(cè)試和驗(yàn)證,以便能夠應(yīng)對(duì)復(fù)雜的場(chǎng)景,而這需要大量涵蓋此類場(chǎng)景的數(shù)據(jù)。 在現(xiàn)實(shí)世界中,收集此類場(chǎng)景數(shù)據(jù)要耗費(fèi)大量時(shí)間和成本。而現(xiàn)在,仿真提供了另一個(gè)可選方案。但要大規(guī)模生成復(fù)雜動(dòng)態(tài)場(chǎng)景仍然
2023-12-16 16:05:011379 
可以看一下單目深度估計(jì)效果,這個(gè)深度圖的分辨率是真的高,物體邊界分割的非常干凈!這里也推薦工坊推出的新課程《單目深度估計(jì)方法:算法梳理與代碼實(shí)現(xiàn)》。
2023-12-17 10:01:161572 
本研究提出了一種自監(jiān)督的多攝相機(jī)3D占據(jù)預(yù)測(cè)方法,名為OccNeRF。該方法旨在解決無(wú)界場(chǎng)景的建模問(wèn)題。
2024-01-02 14:53:531009 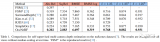
應(yīng)用中往往難以實(shí)現(xiàn)。因此,無(wú)監(jiān)督學(xué)習(xí)在深度學(xué)習(xí)中扮演著越來(lái)越重要的角色。本文旨在綜述深度學(xué)習(xí)中的無(wú)監(jiān)督學(xué)習(xí)方法,包括自編碼器、生成對(duì)抗網(wǎng)絡(luò)、聚類算法等,并分析它們的原理、應(yīng)用場(chǎng)景以及優(yōu)缺點(diǎn)。
2024-07-09 10:50:072734 的準(zhǔn)確性與可靠性,還通過(guò)實(shí)時(shí)動(dòng)態(tài)追蹤與短報(bào)文通信功能,為安全管理與高效作業(yè)提供了強(qiáng)有力的技術(shù)支持。單北斗定位終端單北斗定位終端的優(yōu)勢(shì)在多個(gè)場(chǎng)景下更加凸顯,以下是一
2024-08-21 10:29:271344 
如今,動(dòng)態(tài)實(shí)時(shí)健康監(jiān)測(cè)在不同領(lǐng)域都有日益增長(zhǎng)的需求。基于自連這兩款藍(lán)牙網(wǎng)關(guān)的數(shù)字化健康管理方案,能夠在不同場(chǎng)景,以不同形式部署實(shí)現(xiàn)。
2024-08-29 11:16:031094 
在自連智能終端產(chǎn)品系列中,有 兩款 藍(lán)牙網(wǎng)關(guān)是動(dòng)態(tài)健康管理的理想解決方案。 DGW412網(wǎng)關(guān) 藍(lán)牙轉(zhuǎn)4G數(shù)據(jù)傳輸功能 ??適用于佩戴動(dòng)態(tài)監(jiān)測(cè)設(shè)備進(jìn)行較大范圍移動(dòng),數(shù)據(jù)需要穩(wěn)定傳輸?shù)?b class="flag-6" style="color: red">場(chǎng)景。 自連
2024-09-09 18:29:551811 
【導(dǎo)讀】最近,香港科技大學(xué)、上海AI Lab等多個(gè)組織聯(lián)合發(fā)布了一篇時(shí)間序列無(wú)監(jiān)督預(yù)訓(xùn)練的文章,相比原來(lái)的TS2Vec等時(shí)間序列表示學(xué)習(xí)工作,核心在于提出了將空間信息融入到預(yù)訓(xùn)練階段,即在預(yù)訓(xùn)練階段
2024-11-15 11:41:291283 
近日,全球機(jī)器人領(lǐng)域頂會(huì)ICRA 2025(IEEE機(jī)器人與自動(dòng)化國(guó)際會(huì)議)公布論文錄用結(jié)果,地瓜機(jī)器人主導(dǎo)研發(fā)的DOSOD開放詞匯目標(biāo)檢測(cè)算法與MODEST單目透明物體抓取算法成功入選。前者通過(guò)
2025-03-05 19:30:001398 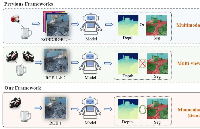
了關(guān)鍵作用。深度估計(jì)技術(shù)可以分為多目深度估計(jì)和單目深度估計(jì)。其中單目攝像頭具有成本低、設(shè)備普及、圖像獲取方便等優(yōu)勢(shì),使得單目深度估計(jì)技術(shù)備受關(guān)注?。深度學(xué)習(xí)技術(shù)的快
2025-03-19 16:33:02979 
上海冠顯光電推出的Fast LCD 1.25" HDMI單目驅(qū)動(dòng)方案,小巧緊湊,采用HDMI 接口,方便客戶前期評(píng)估,可靈活定制接口、外形尺寸等,是光學(xué)瞄準(zhǔn)、熱成像、電子取景器等應(yīng)用的理想方案。
2025-06-17 09:40:22562 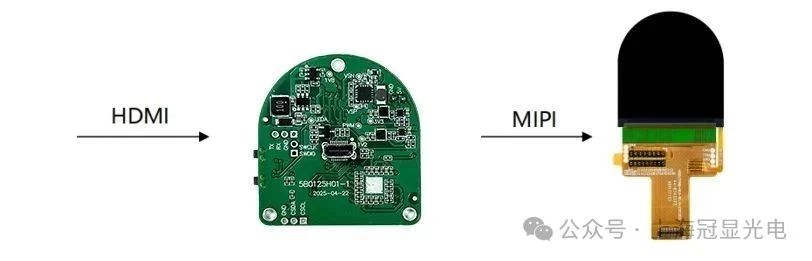
[首發(fā)于智駕最前沿微信公眾號(hào)]自動(dòng)駕駛的純視覺(jué)方案中,單目攝像頭因無(wú)法直接感知深度,在環(huán)境理解上存在根本局限,雙目視覺(jué)技術(shù)在此需求下應(yīng)運(yùn)而生。它通過(guò)模擬人眼,利用雙攝像頭的視差來(lái)推算距離,將二維圖像
2025-12-31 09:45:50295 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論