 單目視覺識別的無限市場潛力
單目視覺識別的無限市場潛力

對單目來說物體越遠,測距的精度越低,硬件上的缺點可以通過算法去彌補,近日有兩篇關于單目視覺的研究論文曝光,一篇是單目視頻的深度估計,另一篇則是單目3d物體識別,在數據集下測試都取得了不錯的效果,我們熟悉的單目攝像頭可能一直被低估了。
攝像頭是自動駕駛汽車中重要的傳感器之一,在自動駕駛過程中的首要任務就是道路識別 ,主要是圖像特征法和模型匹配法來進行識別。行駛過程中需要進行障礙物檢測和路標路牌識別等,此時車輛上的信息采集便可以運用單目視覺或者多目視覺。
由于很多圖像算法的研究都是基于單目攝像機開發的,因此相對于其他類別的攝像機,單目攝像機的算法成熟度更高。基于單目攝像頭可以用來定位、目標識別等。但是相比多目,單目有著先天的缺陷,視野信息不能夠豐富,單目測距的精度也較低。
不過單目攝像頭的作用還未發揮到極致,近日有兩篇關于單目視覺的研究,讓眾多研究者驚艷,原來單目一樣可以有不錯的表現。
Paper1:
Orthographic Feature Transform for Monocular 3D Object Detection
單目3d物體檢測是一件很有挑戰性的事情,目前最先進系統的成績也不及用激光雷達的1/10,劍橋大學的科學家利用單目視覺進行3d物體識別,通過引入正交特征變換,使基于圖像的特征映射到正交3D空間,來避免形成圖像域,可以全面地推斷出各個物體比例尺寸以及相隔的距離。通過在KITTI數據集里測試,發現與前人的Mono3D方法對比,這種方法在鳥瞰圖平均精確度、3D物體邊界識別上各項測試成績上均優于對手。
尤其在探測遠處物體時要遠超Mono3D,遠處可識別出的汽車數量更多。甚至在嚴重遮擋、截斷的情況下仍能正確識別出物體。在某些場景下甚至達到了3DOP系統的水平。
在這項工作中,提出的一種新穎的單目三維物體檢測方法,基于在鳥瞰視野范圍內操作的,減輕了許多不良圖像的屬性,更易于推斷出世界的3D結構。用一種簡單的正交特征變換,將基于圖像的特征轉換為這種鳥瞰視圖表示, 并描述了如何使用圖像積分有效地實現它,以深二維卷積網絡的形式應用于提取的鳥瞰特征,取得了不錯的效果,說明單目還有很大可開發的空間。
Paper2:
A Structured Approach to Unsupervised Depth Learning from Monocular Videos
這是谷歌的工程師做的一個研究,他利用單目視頻深度估計,自從2014年NIPS上出現第一篇用CNN-based來做單目深度估計,近幾年也不斷涌現出一些做單目深度估計的文章,有直接依靠深度學習和網絡架構得到結果,還有依靠于深度信息本身的性質進行估計,基于CRF和基于相對深度方法的,本篇文章是基于無監督學習單目視頻深度估計。文中的方法能夠模擬運動物體并產生高質量的深度估計結果,與以前的單目視頻無監督學習方法相比,該方法能夠恢復移動物體的正確深度。也就說,能夠正確地恢復與自身運動車輛相同速度的移動汽車的深度。因為一臺相對靜止的車輛,往往會表現出與地面相同的無線深度特征,解決了高動態場景中的問題。
-
攝像頭
+關注
關注
61文章
5091瀏覽量
103110 -
視覺識別
+關注
關注
3文章
111瀏覽量
17365 -
自動駕駛
+關注
關注
793文章
14880瀏覽量
179794
原文標題:被低估的單目視覺識別
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
安富利中國榮獲瑞薩電子2025年度大眾市場潛力獎
雙目視覺是如何實現深度估計的?

智能電網升級浪潮下,新潔能NCE65T1K2K功率器件的應用價值與市場潛力?

iTOF技術,多樣化的3D視覺應用
雙目視覺在智能駕駛領域的應用
基于LockAI視覺識別模塊:C++人臉識別
基于LockAI視覺識別模塊:C++人臉識別

基于LockAI視覺識別模塊:手寫數字識別
基于LockAI視覺識別模塊:手寫數字識別
基于LockAI視覺識別模塊:C++條碼識別
打破室外全域工作“盲區”!廣和通雙目視覺算法將成就云深處科技機器狗“慧眼”

從深圳V2G車網互動看國產SiC模塊在雙向充電樁應用的市場潛力
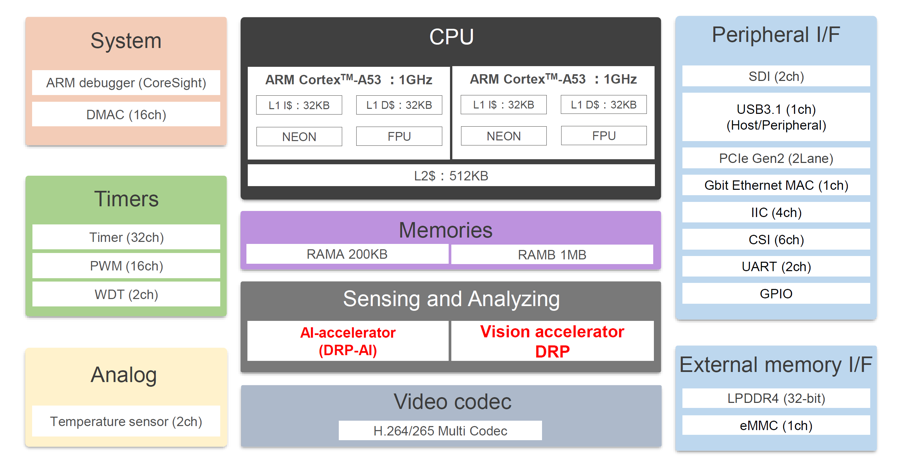
支持實時物體識別的視覺人工智能微處理器RZ/V2MA數據手冊



 工商網監
工商網監
評論