 破解透明物體抓取難題,地瓜機器人 CASIA 推出幾何和語義融合的單目抓取方案|ICRA 2025
破解透明物體抓取難題,地瓜機器人 CASIA 推出幾何和語義融合的單目抓取方案|ICRA 2025

概述
近日,全球機器人領域頂會ICRA 2025(IEEE機器人與自動化國際會議)公布論文錄用結果,地瓜機器人主導研發的DOSOD開放詞匯目標檢測算法與MODEST單目透明物體抓取算法成功入選。前者通過動態語義理解框架提升復雜場景識別準確率,后者結合幾何建模與語義分析技術優化透明物體操作精度,兩項技術成果均已在規模化商業場景中得到有效驗證。此次投稿的兩篇論文全部入選,不僅彰顯了ICRA對機器人感知領域的高度重視,同時也印證了地瓜機器人團隊在機器人視覺領域的領先優勢。
DOSOD開放詞匯目標檢測算法,本期文章將圍繞MODEST單目透明抓取算法進行重點介紹。
作為機器人執行各項任務中繞不開的操作對象,水杯、試管、窗戶等透明物體在人類生活中無處不在。從精密制造、醫療實驗室和家庭服務機器人等領域,透明物體的精確操作是提升自動化和智能化水平的關鍵。然而,透明物體復雜的折射和反射特性給機器人感知造成了很大困難。在大多數RGB圖像中的透明物體往往缺乏清晰的紋理,而容易與背景混為一體。此外,商用深度相機也難以準確捕捉這些物體的深度信息,導致深度圖缺失或噪聲過多,從而限制了機器人在多個領域的廣泛應用。
為了解決透明物體的抓取問題,地瓜機器人聯合中科院自動化所(簡稱:CASIA)多模態人工智能系統全國重點實驗室,推出了針對透明物體的單目深度估計和語義分割的多任務框架(簡稱:MODEST)。該框架借助創新性的語義和幾何融合模塊,結合獨特的特征迭代更新策略,顯著提升了深度估計和語義分割的效果,尤其在抓取成功率和系統泛化性方面取得了突破性進展。
MODEST算法框架作為通用抓取模型的前置模塊,即插即用,靈活高效,且無需依賴額外傳感器,僅靠單張RGB圖像,便可實現透明物體的抓取,效果上甚至要優于其它雙目和多視圖的方法,可以廣泛應用于智能工廠、實驗室自動化、智慧家居等場景,降低設備成本并大幅提升機器人對透明物體的操作能力。
基本原理
當前透明物體的抓取核心在于深度信息的獲取,目前無論是深度傳感器還是多視角重建的方法都無法獲取透明物體準確完整的深度信息。為了解決透明物體感知難題,傳統方法大多依賴特殊傳感設備或多視角圖像,增加了時間和經濟成本,并常常受限于應用場景。MODEST單目框架首次突破了傳統傳感器處理透明物體時的限制,降低了設備成本和使用復雜度,提供了更加高效、經濟和便捷的透明物體感知方案。

單目透明物體感知框架與其他方法之間的對比
MODEST主要聚焦于透明物體的深度估計,通過設計的語義和幾何結合的多任務框架,獲取物體準確的深度信息,之后結合基于點云的抓取網絡實現透明物體的抓取。相當于在通用抓取網絡前面增加一個針對透明物體的增強模塊。
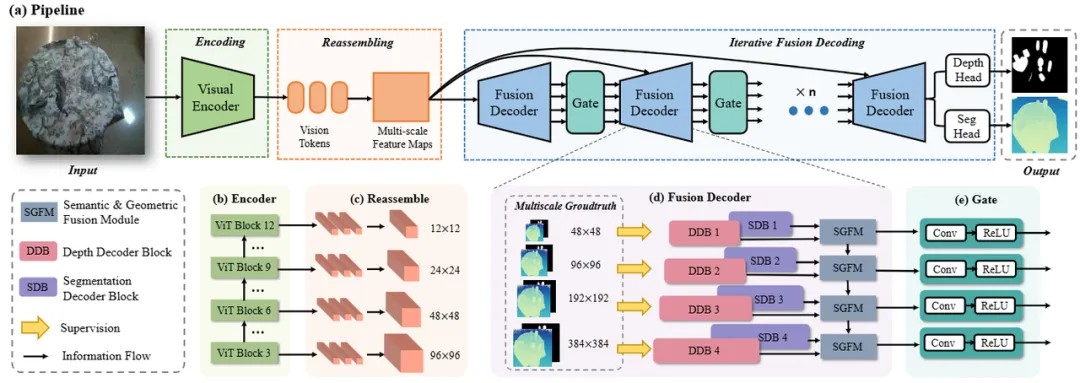
MODEST模型的整體架構如圖所示,輸入為單目RGB圖像,輸出為透明物體的分割結果和場景深度預測。網絡主要由編碼、重組、語義幾何融合和迭代解碼四個模塊組成。輸入圖像首先經過基于ViT的編碼模塊進行處理,隨后重組為對應分割和深度兩個分支的多尺度特征。在融合模塊中對兩組特征進行混合和增強,最后通過多次迭代逐步更新特征,并獲得最終預測結果。
基于語義幾何融合和迭代策略的透明物體單目多任務框架
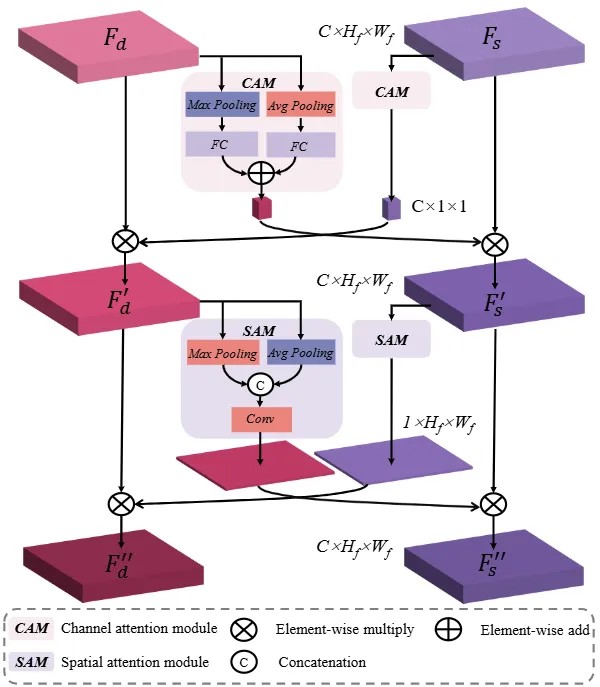
對于透明物體來說,語義分割任務可以為深度估計提供語義和上下文信息,而同樣深度估計可以為分割提供邊界、表面等幾何信息。為了充分挖掘兩個任務間的互補信息,MODEST算法框架構建了基于注意力機制的語義幾何融合模塊,旨在同時提升兩個任務的性能。
語義幾何融合模塊結構
當人類觀察透明物體等不顯著物體時,我們會傾向于先注意物體的整體輪廓,然后是局部細節。受人眼啟發,MODEST框架提出了一種由粗到細的特征更新策略,進一步提升預測精度。
實驗結果
為了測試MODEST全新算法框架的檢測效果,我們選取了透明物體領域兩個影響力廣泛的公開仿真數據集Syn-TODD和真實數據集ClearPose,在其上與目前最先進的透明物體雙目方法SimNet、多視圖方法MVTran以及多任務方法InvPT和TaskPrompter進行對比實驗。兩個大規模數據集都擁有超過100k的良好標注圖像數據,并且包含了嚴重遮擋等極端場景。
公開數據集上的定性和定量對比實驗
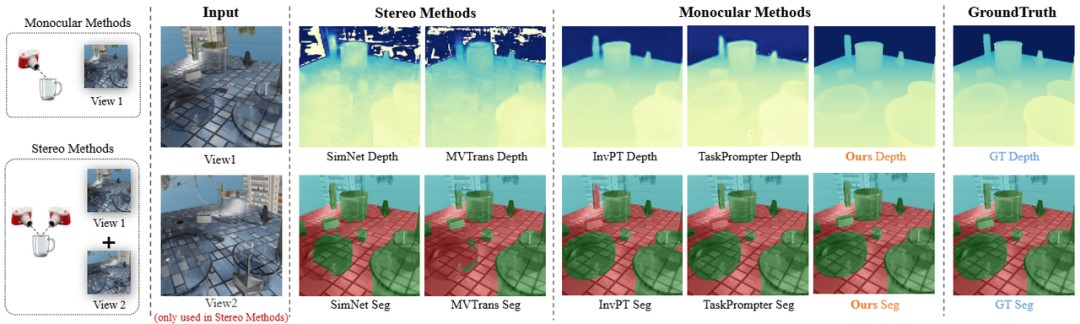
仿真數據集Syn-TODD上的定性對比結果
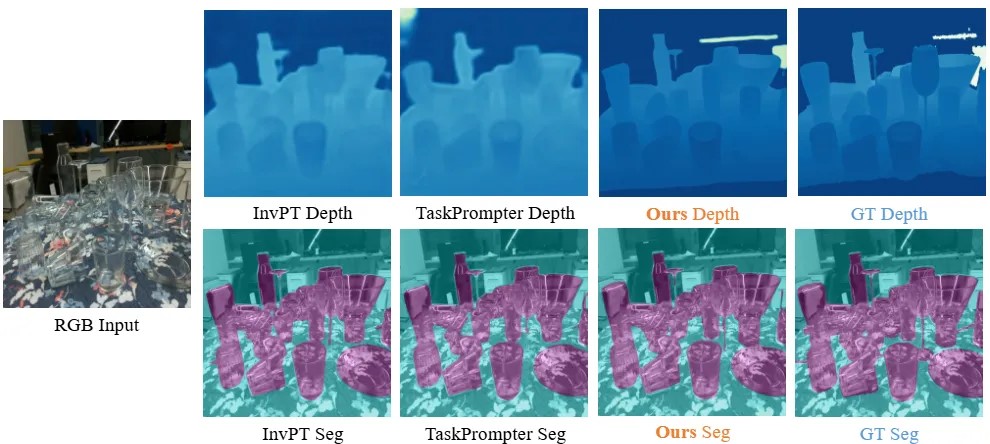
真實數據集ClearPose上的定性對比結果
通過在兩個數據集上的定性對比結果可以看出,由于透明物體會錯誤地折射背景,并且在RGB圖像中缺乏紋理,因此SimNet、MVTrans等方法無法獲得令人滿意的預測,從而導致深度圖和分割掩膜的大面積缺失。然而,通過有效的融合和迭代,在某些即使人眼都難以分析和判斷的場景,我們的方法依然能夠產生完整和清晰的預測結果。
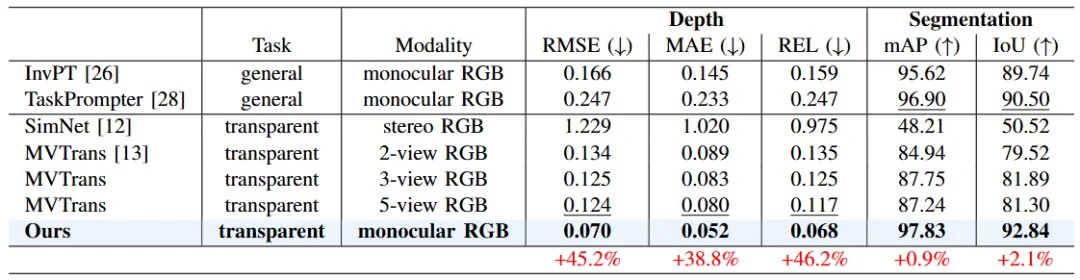
仿真數據集Syn-TODD上的定量對比結果
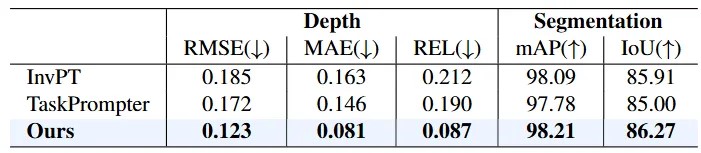
真實數據集ClearPose上的定量對比結果
從表格中的定量對比可以看出,MODEST算法框架在各項指標上都要大幅超過其他所有方法。值得注意的是,盡管只使用單張RGB圖像作為輸入,MODEST在深度估計和語義分割方面都要明顯優于其他雙目甚至多視圖方法。并且在Syn-TODD數據集上,與排名第二的方法相比,MODEST算法框架在RMSE和REL兩項指標有著超過45%的提升,語義分割的精度也均超過了90%。
真實平臺抓取實驗
我們將算法遷移到真實機器人平臺,開展了透明物體抓取實驗。平臺主要由UR機械臂和深度相機構成,在借助MODEST方法進行透明物體精確感知的基礎之上,采用GraspNet進行抓取位姿的生成。在多個透明物體上的實驗結果表明,MODEST方法在真實平臺上具有良好的魯棒性和泛化性。
-
機器人
+關注
關注
213文章
31073瀏覽量
222172 -
人工智能
+關注
關注
1817文章
50094瀏覽量
265276 -
檢測算法
+關注
關注
0文章
122瀏覽量
25754 -
地瓜機器人
+關注
關注
1文章
31瀏覽量
379
發布評論請先 登錄
【案例分享】電子谷定制通訊線束:人形機器人穩定律動連接方案

解鎖“試管自動抓取搬運”新紀元:富唯智能復合機器人重塑精準物流

如何使用機器人分析儀EtherCAT-Analyzer抓取主從站數據?

打造機器人母生態!一年開發者數量翻倍,地瓜機器人發布具身智能大算力開發平臺

廣和通亮相DDC 2025地瓜機器人開發者大會

為什么2025年機器人都在搶SH602HA-AP?

力傳感器在工業自動化機器人中的應用:精確抓取/裝配作業/搬運作業/柔順控制

機器人競技幕后:磁傳感器芯片激活 “精準感知力”
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
地瓜機器人RDK X5 規格書與地瓜機器人RDK X5原理圖
富唯智能最小復合機器人的強大抓取實力?

復合機器人抓取精度的影響因素及提升策略
地瓜機器人,和全球機器人開發者交朋友




 工商網監
工商網監
評論