一種無OS的MCU實用軟件框架,包括任務輪詢管理,命令管理器、低功耗管理、環形緩沖區等實用模塊。系統中廣泛利用自定義段技術減少各個模塊間的耦合關系,大大提供程序的可維護性。
2022-08-31 10:51:38 1010
1010 鋪設異常檢測可以幫助減少數據存儲、傳輸、標記和處理的壓力。本論文描述了一種基于Transformer和自監督學習的新方法,有助于定位異常區域。
2023-12-06 14:57:102892 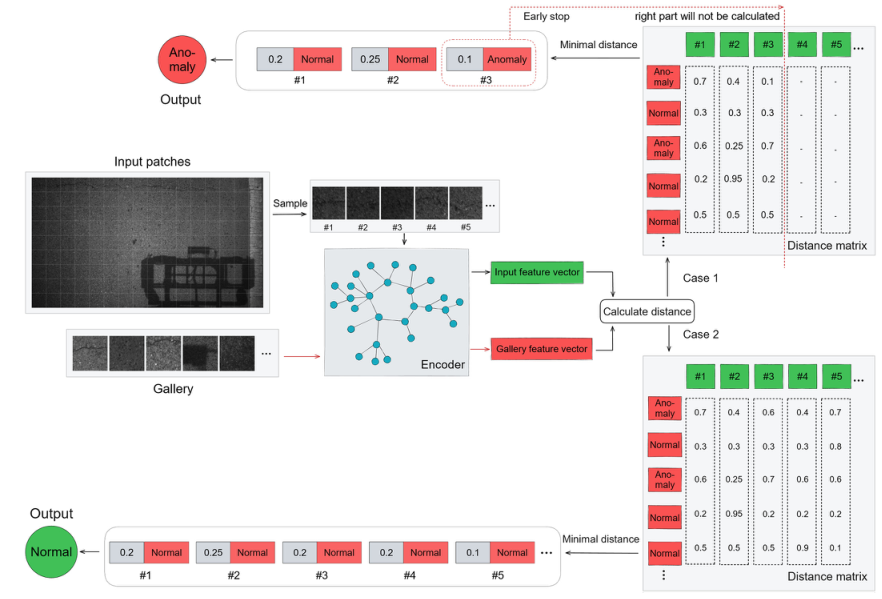
1. 介紹本文提出一種專門用于檢測小目標的框架,框架結構如下圖:我們探索了可以提高小目標檢測能力的3個方面:Dilated模塊,特征融合以及passthrough模塊。Dilated Module
2022-11-04 11:14:00
和易于實現的特點使得此方法在實際的被動聲定位系統中得到了廣泛應用。但是此方法只能在高信噪比和適度混響條件下有較好的性能。針對此問題,給出了一種修正的PHAT-GCC方法,并在不同信噪比和混響環境下
2010-04-22 11:55:28
1、摘要近年來,在深度卷積神經網絡(CNNs)的幫助下,圖像和視頻監控在智能交通系統(ITS)中取得了長足的進展。作為一種先進的感知方法,智能交通系統對視頻監控中每一幀感興趣的目標進行檢測是其廣泛
2021-08-31 07:43:19
摘要故障診斷是保證水輪發電機組安全運行的重要環節。軸心軌跡辨識是HGU故障診斷的一種有效方法。提出了一種基于綜合幾何特征和概率神經網絡(CGC-PNN)的HGU軸軌識別方法。該方法從結構、區域和邊界
2021-09-15 08:18:35
一種較通用的界面切換框架分享,絕對實用
2021-12-27 06:02:28
單路D型觸發器有何功能呢?有哪些引腳?如何利用單路D型觸發器去設計一種自鎖開關?
2022-02-28 08:06:24
CPU優化深度學習框架和函數庫機器學***器
2021-02-22 06:01:02
本文給大家介紹一種單WiFi功能雙頻WiFi模塊。
2021-05-18 07:17:30
本文介紹了一種基于H.264標準的快速運動估計算法。
2021-06-03 06:27:37
介紹一種嵌入式框架模板的構建方案
2022-02-22 06:25:45
在RK3399開發板上如何去實現一種人工智能深度學習框架呢?
2022-03-07 07:00:05
如何利用STM32去實現一種兩輪自平衡車呢?
2021-12-20 07:44:28
ThreadX內核模板框架是怎樣去設計的?如何去實現一種ThreadX內核框架的設計呢?
2021-11-29 07:08:01
基于Flex框架的卷接機組監控系統是怎樣構成的?怎樣去設計一種基于Flex框架的卷接機組監控系統?
2021-09-24 07:36:29
分析了目前常用的波達角估計算法,研究了等距線陣和圓陣的特點,指出其存在關于橫軸鏡像對稱信號源的空間模糊性,利用等距T型陣克服了這一困難。提出了一種新的基于訓練
2008-12-16 23:57:57 10
10 提出了一種利用PN序列進行OFDM頻率估計的新方法。在多徑信道中,該方法由于利用了多徑信號,提高了頻率估計精度。仿真結果顯示,其頻率估計精度能滿足Rayleigh信道下中低速運
2009-02-28 16:34:5823 提出一種新的Ad Hoc網絡QoS保障框架。該框架能夠區分不同優先級的業務和不同QoS要求的業務。能夠保障在網絡可用資源不足的情況下,高優先級的業務通過“搶占”的方式接入網絡
2009-04-14 09:43:3820 一種適合軟件無線電的GMSK時鐘和載波相位聯合估計算法關:摘 要: 利用最大似然估計準則, 針對G MS K提出了一種不需要前導字的前饋載波相位和時鐘誤差聯合佑計算法, 可用于
2009-05-07 10:44:0229 運用組件復用的思想,結合XML技術,設計開發了一種基于可復用的組件庫的Web測控軟件框架。通過使用該軟件框架中提供的豐富的組件庫和靈活的插件管理機制,大大地降低了基于WE
2009-06-06 14:51:2417 信道估計作為OFDM 中的一項關鍵技術,直接影響著OFDM 系統的性能。而現有的最小二乘估計(LS)算法、最小均方誤差估計(MMSE)算法等都存在各自的不足。因此本文提出了一種稱
2009-06-18 08:29:2516 運動員姿態的計算是非常困難的并且有很多應用。在本文中,我們主要針對運動員身體傾角,提出了一種基于單目攝像機的幾何計算方法。首先,利用針孔模型對場景進行3d 重建
2009-08-12 08:41:129 提出了一種基于運動特性的自適應快速運動估計算法。該算法充分利用視頻圖像序列的運動特征進行運動模式判定,實現了一種簡單高效的搜索方法,并且根據不同的運動模式動態
2009-08-15 07:59:4218 通過研究連續時間OFDM 信號的相位特性,采用了一種新的過采樣CFO 盲估計算法。這種方法利用由CFO 產生的共同相偏來獲得高性能頻偏估計,具有高帶寬和數據利用率的特點。
2009-08-17 08:28:5515 該文對K 分布雜波模型統計特性做了深入分析和推導,提出了一種新的運用樣本算數平均和幾何平均的高精度低運算量的K 分布雜波模型參數估計快速算法,并對算法的估計精度作了
2009-11-25 14:48:105 為了減小NLOS 傳播的影響,基于幾何結構的單次反射統計信道模型,該文提出一種NLOS 環境下的TOA/AOA 定位算法。利用RBF 神經網絡較快的學習特性和逼近任意非線性映射的能力,對NLOS
2009-11-25 15:46:2922 數字水印在應用中會受到很多種攻擊,其中幾何攻擊是危害比較大的一種攻擊,它直接導致水印無法被識別,從而使版權保護失效。本文提出了一種利用了離散小波變換和離散余弦
2010-01-15 15:36:3110 一種積分過程PID自整定方法:針對積分加滯后過程,提出了一種設定值加權的pid控制器參數自整定方法,并且針對該方法定義了一種魯棒性能指標.首先引入一種內部反饋結構,利用
2010-03-18 15:58:0721 一種特殊陣列實現DOA估計的方法:提出了一種基于特殊陣列形式實現doa估計的方法,在均勻線性陣列(UniformLinearArray,ULA)上增加一個陣元,將陣元
2010-03-18 16:18:5019 汽車牌照自動識別系統中由于拍攝得到的字符模糊經常造成分割效果不佳。通常采用的灰度處理方法也丟失了很多顏色信息。本文提出一種基于模糊神經網絡的算法,充分利用車
2010-07-16 18:00:5510 為了降低全搜索運動估計算法帶來的巨大計算量,提高運動估計計算速度,提出了一種新型的用于全搜索運動估計硬件結構。該硬件結構能實時地通過全搜索運動估計來搜索每個像素塊
2010-07-29 16:07:4516 分析已有的一些基音估計算法,對比其優缺點,提出一種可大大提高計算速度的高效基音估計算法。該算法是利用平均幅度差(MAMDF)法提取若干個可能峰值點,再利用計算精度較高
2010-12-31 17:21:070
一種單管電路
2009-07-29 12:19:48760 一種新的估計基礎矩陣的高精度魯棒算法_張永祥
2017-01-03 15:24:450 一種改進的循環譜估計算法_劉鋒
2017-01-07 16:06:320 工業物聯網中節點資源受限,數據融合是減少能耗最重要的技術之一。為了保障工業物聯網中數據在融合過程的安全性,提出一種基于監督機制的工業物聯網安全數據融合方法。首先將采集的數據映射成模式碼后進行融合
2017-01-13 16:18:380 一種成分取證的理論分析模式的分類框架
2017-03-20 11:04:200 基于單目深度估計的紅外圖像彩色化方法_戈曼
2017-03-17 10:13:010 針對當前物流配送中手持終端造成的信息采集單一和成本高昂,且缺乏送貨監控的問題,提出一種基于手機Andriod系統的物流管理與監督系統。通過客戶手機實現對物流信息采集的多樣化,并借助用戶和系統服務器
2017-11-13 14:23:284 本文在分析Rife,MRife和傅里葉系數插值迭代3種算法的基礎上,將串行迭代變為并行迭代,由此得出了一種快速頻率估計算法,并分析了新算法與前3種算法的異同。計算機仿真結果證實新算法能夠快速、高精度估計單頻信號的頻率,便于工程實現,適合應用在雷達、電子對抗等對處理實時性要求非常高的領域。
2017-11-23 15:36:0010359 針對場景標注中如何產生良好的內部視覺信息表達和有效利用上下文語義信息兩個至關重要的問題,提出一種基于深度學習的多尺度深度網絡監督模型。與傳統多尺度方法不同,模型主要由兩個深度卷積網絡組成:首先網絡
2017-11-28 14:22:100 點模式匹配是目標識別、圖像配準與匹配、姿態估計等計算機視覺與模式識別應用方向的基礎問題之一。提出了一種新的利用點特征進行匹配的算法,該算法根據點集的分布與點位置信息,構建了點的特征屬性圖,通過極坐標
2017-12-05 19:08:072 太復雜,采用傳統方法難以進行有效識別。針對手繪幾何圖形識別中結構分析這一核心技術問題,設計了一種幾何圖形結構描述模型,該模型通過對圖元及其約束關系的形式化描述來表示圖形,使用可伸縮矢量圖形( SVG)標簽存儲圖
2017-12-21 14:47:290 針對圖像修復結果中存在物體結構上的不連續性和不完整性的問題,提出一種基于深度信息的圖像修復算法。首先,通過建立平面參數馬爾可夫模型來推測圖像中像素點所在場景空間中的深度信息,從而劃分出圖像中的共面
2018-01-03 14:49:050 問題,對半監督學習中的協同訓練算法進行改進,提出了一種基于多學習器協同訓練模型的人體行為識別方法.這是一種基于半監督學習框架的識別算法,該方法首先通過基于Q統計量的學習器差異性度量選擇算法來挑取出協同訓練中基學習
2018-01-21 10:41:091 雙目匹配需要把左圖像素和右圖中其對應像素進行匹配,再由匹配的像素差算出左圖像素對應的深度,而之前的單目深度估計方法均不能顯式引入類似的幾何約束。由于深度學習模型的引入,雙目匹配算法的性能近年來得到了極大的提升。
2018-06-04 15:46:4935978 
MACE,是指小米公司自研的移動端深度學習框架Mobile AI Compute Engine。2017年12月,這一深度學習框架就在小米公司內部正式發布了。
2018-07-26 14:06:464256 器,從單目圖像中預測動作。雖然在訓練該估計器的時候需要標注動作,不過一旦訓練完成,估計器在應用到新圖片上時就無需再次訓練了。
2018-10-12 09:06:293329 深度壓縮感知(DCS)框架通過聯合訓練生成器和通過元學習優化重建過程,顯著提高了信號恢復的性能和速度。作者探索了針對不同目標的測量訓練,并給予最小化測量誤差推導出一系列模型。
2019-05-25 09:25:524316 
本文提出了一種自監督同變注意力機制(self-supervised equivariant attention mechanism,簡稱SEAM),利用自監督方法來彌補監督信號差異。在強監督語義分割的數據增廣階段,像素層級標注和輸入圖像需經過相同的仿射變換
2020-05-12 10:16:138561 
針對在傳統機器學習方法下單幅圖像深度估計效果差、深度值獲取不準確的問題,提出了一種基于多孔卷積神經網絡(ACNN)的深度估計模型。首先,利用卷積神經網絡(CNN)逐層提取原始圖像的特征圖;其次,利用
2020-09-29 16:20:005 Approach for Image-Sentence Matching UsingDocument-Level Structural Information,提出了一種無監督設定下,更有效地利用多模態文檔
2020-12-26 10:26:132928 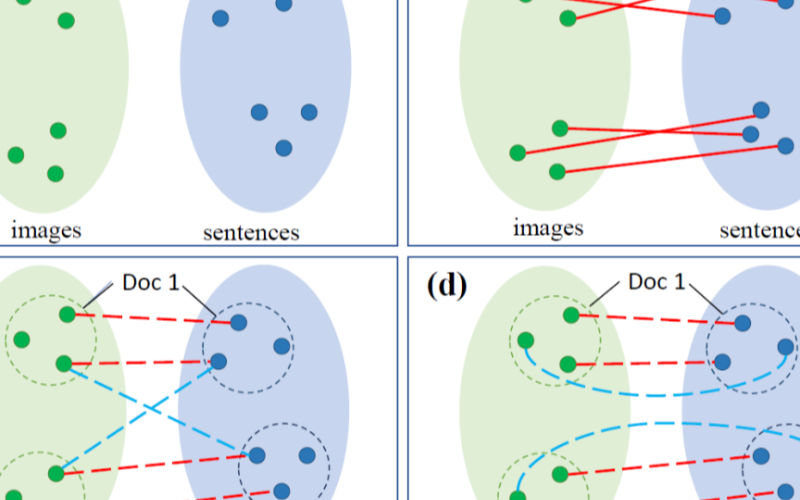
采用卷積神經網絡對單目圖像的深度進行估計時,存在深度信息不精確、邊緣模糊以及細節缺失等問題。為此,提出一種多層級特征融合結構的深度卷積網絡。該網絡采用端到端的編-解碼器結構,編碼器
2021-03-16 09:21:207 為提高真實場景下頭部姿態估計的準確性,提出一種采用深度殘差網絡的頭部姿態估計方法。將深度殘差網絡 Restnetl01作為主干網絡,引入優化器提高深層卷積網絡訓練時的梯度穩定性,使用RGB圖像并采用
2021-03-16 11:27:448 岀一種基于框架特征的共指消解方法,該方法通過融合漢語框架語義信息并采用多種分類算法實現共指消解。框架語義篇章語料集上的實驗結果表明,將漢語框架特征琙用亐分類器上能夠較好地提升共指消解結果且支持向量機的分類
2021-03-19 11:35:197 為改善單目圖像語義分割網絡對圖像深度變化區域的分割效果,提出一種結合雙目圖像的深度信息和跨層次特征進行互補應用的語義分割模型。在不改變已有單目孿生網絡結構的前提下,利用該模型分別提取雙目左、右輸入
2021-03-19 14:35:2421 和數據有限的標簽信息融入到CF模型中,提出了一種帶有局部坐標約束的半監督的概念分解(SLCF)算法。SICF算法利用局部坐標約束學習數據的稀疏性,數據標簽約束矩陣能夠保證同類標簽的數據映射到低維空間中擁有相同的標簽,從而提高
2021-03-31 11:47:2210 非負矩陣分解(NMF)是一種非常有效的數據降維方法,廣泛應用于圖像聚類等領域。然而NMF是種無監督的方法,沒有使用數據的標簽信息,也不能捕獲數據固有的幾何結構,并且這是一種線性的方法,不能處理數據
2021-04-07 16:01:1230 。文中提岀了一種基于光滑表示的半監督分類算法。具體來說,此方法通過應用一個低通濾波器來實現數據的平滑,然后將光滑數據用于半監督分類。此外,所提方法將常見的圖構造和標簽傳播集成到一個統一的優化框架中,使它們互相
2021-04-08 10:47:2817 演化算法和分析方法的結合是機器學習領域近幾年的一個研究熱點。研究如何將差分進化(DE)演化算法與基于超限學習機(ELM)的半監督分類算法相結合。首先,提出了一種基于DE和ELM的半監督分類方法
2021-04-09 16:16:215 交通流預測作為智能交通系統的一個關鍵問題,是國內外交通領域的硏究熱點。交通流預測的主要挑戰在于交通流數據本身具有復雜的時空關聯,且易受各種社會事件的影響。針對這些挑戰,提出一種用于交通流預測的深度
2021-04-14 15:54:183 【導讀】Facebook的研究人員近日提出了一種用于超參數調整的自我監督學習框架。
2021-04-26 09:45:442159 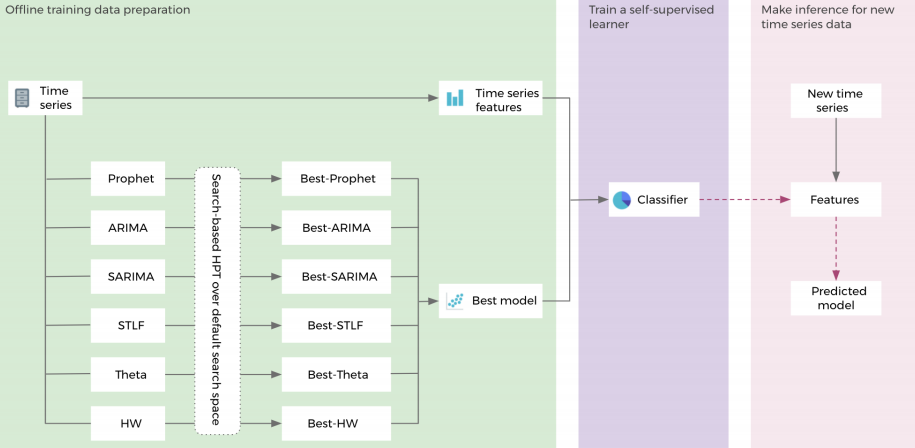
針對加權蓋爾圓估計準則不能充分利用增廣加權蓋爾圓矩陣信息的不足,在該準則基礎上提出一種融合多重特征的信源個數估計方法。利用陣列天線的接收信號構建增廣加權蓋爾圓矩陣,從中獲取用于描述信源個數的蓋爾圓心
2021-04-27 13:59:353 為了提高利用深度神經網絡預測單圖像深度信息的精確度,提出了一種采用自監督卷積神經網絡進行單圖像深度估計的方法。首先,該方法通過在編解碼結構中引入殘差結構、密集連接結構和跳躍連接等方式改進了單圖像深度
2021-04-27 16:06:3513 自監督學習的流行是勢在必然的。在各種主流有監督學習任務都做到很成熟之后,數據成了最重要的瓶頸。從無標注數據中學習有效信息一直是...
2022-01-26 18:50:171 一種基于偽標簽半監督學習的小樣本調制識別算法 來源:《西北工業大學學報》,作者史蘊豪等 摘 要:針對有標簽樣本較少條件下的通信信號調制識別問題,提出了一種基于偽標簽半監督學習技術的小樣本調制方式分類
2022-02-10 11:37:361362 本文由深蘭科學院撰寫,文章將為大家細致講解一種有效的無監督深度表示器(Mix2Vec),該方法可將異構數據映射到統一的低維向量空間,避免混合異構數據相似度度量偏差問題。同時,該方法基于深度異構
2022-03-24 17:22:112272 為了解決大規模點云語義分割中的巨大標記成本,我們提出了一種新的弱監督環境下的混合對比正則化(HybridCR)框架,該框架與全監督的框架相比具有競爭性。
2022-09-05 14:38:002060 與被充分研究的單手姿態估計任務不同,交互手3D姿態估計是近兩年來剛興起的學術方向。現存的工作會直接同時預測交互手的左右兩手的姿態,而我們則另辟蹊徑,將交互手姿態估計任務,解耦成左右兩手分別的單手姿態估計任務。這樣,我們就可以充分利用當下單手姿態估計技術的最新進展。
2022-09-14 16:30:231464 基于幾何的單目3D目標檢測通過2D-3D投影約束估計目標的位置。具體來說,網絡預測目標的尺寸(),旋轉角。假設一個目標有n個語義關鍵點,論文回歸第i個關鍵點在圖像坐標中的2D坐標和object
2022-10-09 15:51:321675 作為一種能夠直接測量深度的傳感器,其相較于Lidar存在較大的誤差,因此利用雷達本身精度難以精確地將雷達結果與單目方法的3D估計相關聯。
2023-01-10 09:35:081807 我們提出了一種利用深度密集單目 SLAM 和快速不確定性傳播從圖像重建 3D 場景的新方法。所提出的方法能夠密集、準確、實時地 3D 重建場景,同時對來自密集單目 SLAM 的極其嘈雜的深度估計具有魯棒性。
2023-01-30 11:34:221235 一種無OS的STM32實用軟件框架,包括任務輪詢管理,命令管理器、低功耗管理、環形緩沖區等實用模塊。系統中廣泛利用自定義段技術減少各個模塊間的耦合關系,大大提供程序的可維護性。
2023-02-24 18:00:041206 一般而言,單目是無法依靠自身來完成測量的,有企業選擇讓單目相機動起來,但是一旦動起來實際上也是雙目,不再是單目。其實單目最大的問題是缺少了深度信息。近大遠小是我們最常用的成像規律,近處物體在視場中占比大,遠處物體在視場中占比小。
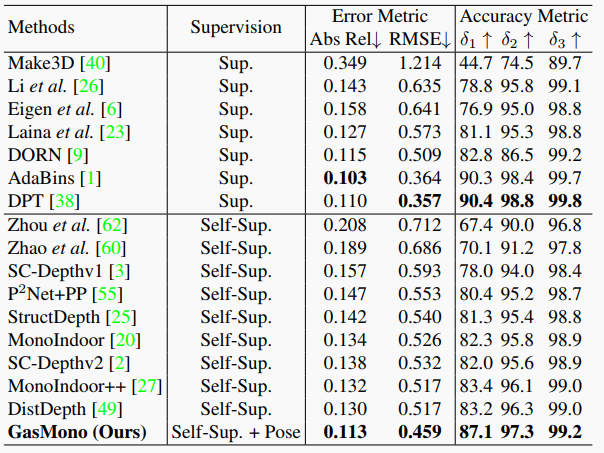
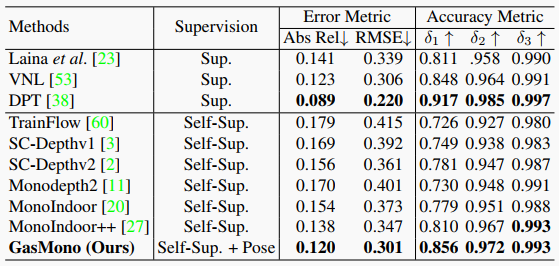
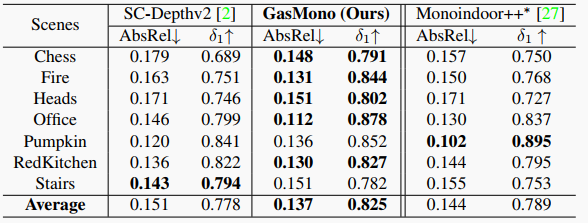
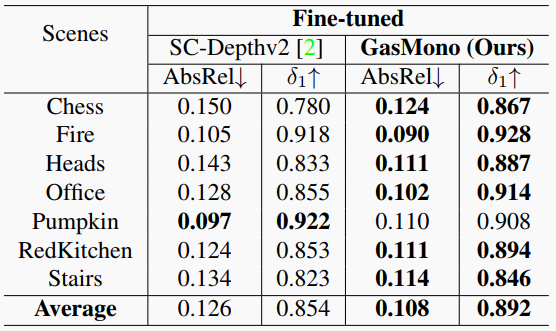
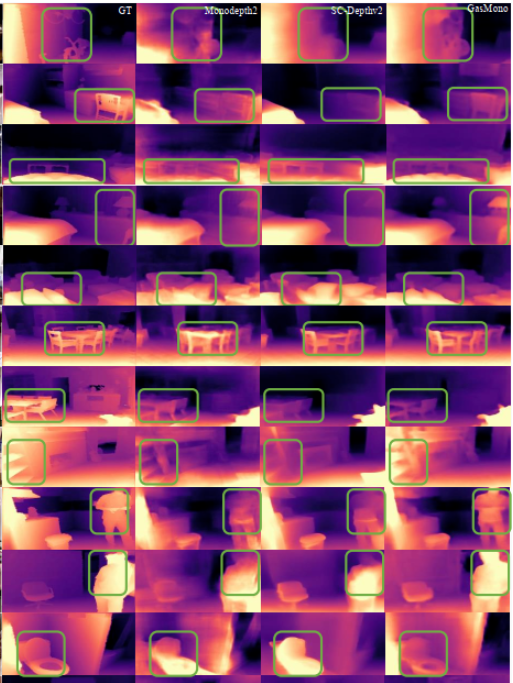
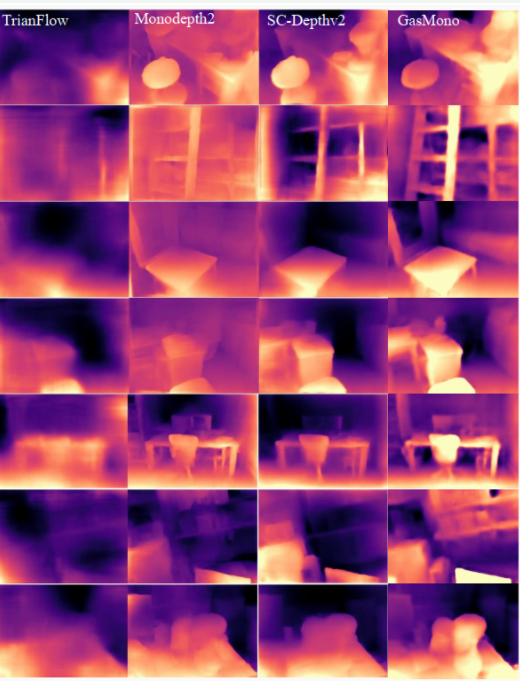
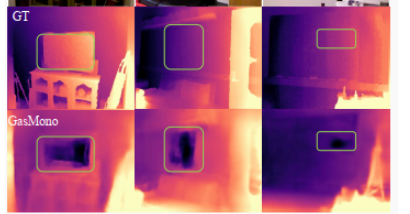
2023-03-01 11:19:432168 自監督單目深度估計不需要地面實況訓練,近年來受到廣泛關注。設計輕量級但有效的模型非常有意義,這樣它們就可以部署在邊緣設備上。
2023-03-14 17:54:163577 單目深度估計分為兩個派系,metric depth estimation(度量深度估計,也稱絕對深度估計)和relative depth estimation(相對深度估計)。
2023-03-21 18:01:258456 論文提出了PVO,這是一種新的全景視覺里程計框架,用于實現場景運動、幾何和全景分割信息的更全面建模。
2023-05-09 16:51:582681 
? ? 本文提出了一種生產化的端到端立體深度感知系統設計,可以完成預處理、在線立體校正和立體深度估計,并支持糾偏失敗后的單目深度估計備選方案。同時,該深度感知系統的輸出應用于一種基于智能眼鏡拍攝
2023-05-26 16:12:001354 
的深度回復能力。
神經網絡給我們提供了一種全新的解決思路,使用cnn直接回歸出目標在相機坐標系下的深度信息,這種做法可在一定程度上
達到激光雷達的效果,令人興奮!如果使用多個不同焦距的相機進行拼接,完全有可能實現
2023-06-07 11:48:350 我的論文方向目前是使用單目攝像頭實現機器人對人的跟隨,首先單目攝像頭與kinect等深度攝像頭最大的區別是無法有效獲取深度信息,那就首先從這方面入手,嘗試通過圖像獲取攝像頭與人的距離。
2023-07-03 10:01:474170 
由于噪聲和退化,并非所有正確匹配都能給出良好的姿態。之前的操作僅保證具有判別性高的描述子的特征點有更高的匹配分數,并且首先被識別以參與姿態估計,但忽略了魯棒姿態估計所需的幾何要求。
2023-07-18 12:58:56960 
深度學習框架是什么?深度學習框架有哪些?? 深度學習框架是一種軟件工具,它可以幫助開發者輕松快速地構建和訓練深度神經網絡模型。與手動編寫代碼相比,深度學習框架可以大大減少開發和調試的時間和精力,并提
2023-08-17 16:03:093886 深度學習框架的作用是什么 深度學習是一種計算機技術,它利用人工神經網絡來模擬人類的學習過程。由于其高度的精確性和精度,深度學習已成為現代計算機科學領域的重要工具。然而,要在深度學習中實現高度復雜
2023-08-17 16:10:572408 深度學習框架和深度學習算法教程 深度學習是機器學習領域中的一個重要分支,多年來深度學習一直在各個領域的應用中發揮著極其重要的作用,成為了人工智能技術的重要組成部分。許多深度學習算法和框架提供了
2023-08-17 16:11:261829 LOG-LIO的流程接收來自3D激光雷達和慣性測量單元(IMU)的輸入,如圖2所示。對于新的輸入掃描,我們首先使用Ring FALS來估計原始點的法線,在使用IMU測量校正畸變后,根據它們的局部幾何信息,在未畸變的點云和地圖之間執行關聯。
2023-08-18 15:45:301541 
本文提出了一種適用于動態場景的多層次地圖構建算法,如圖1所示的系統框架。首先,利用YOLOX[8]獲取場景的語義信息,采用多目標跟蹤算法對漏檢進行補償,利用DBSCAN密度聚類算法和深度信息進一步優化潛在移動物體的檢測邊界框。
2023-08-28 10:56:471268 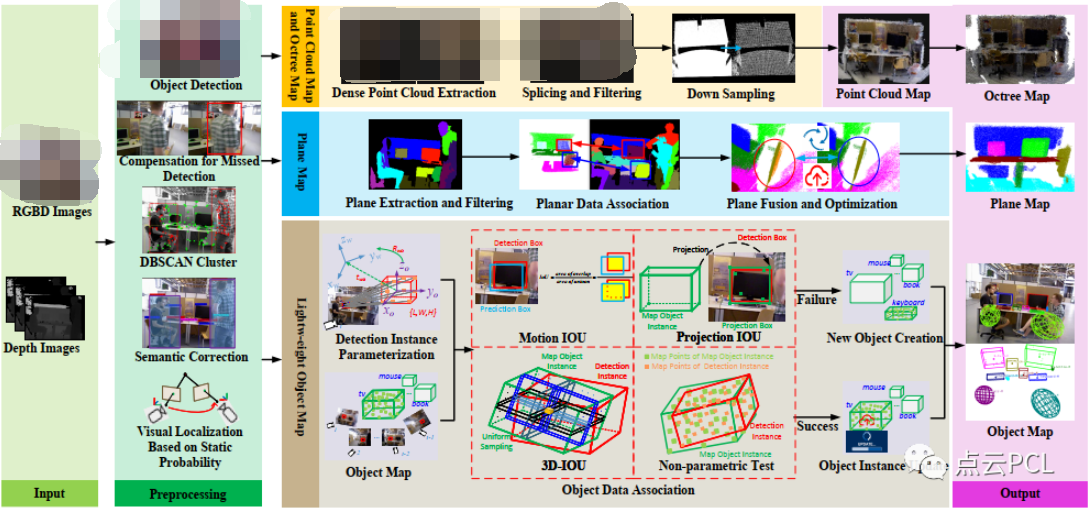
在這些情況下, 傳感器自帶的噪聲、無紋理的黑暗區域和反光等不利因素都違反了基于監督和自監督學習方法的訓練假設。自監督方法無法建立學習深度所需的像素的對應關系,而監督方法則可能從傳感器真值中(如上圖中的 LiDAR 與 nuScenes 的數據樣本)中學習到數據瑕疵。
2023-09-04 16:14:201275 
自監督單目深度估計的訓練可以在大量無標簽視頻序列來進行,訓練集獲取很方便。但問題是,實際采集的視頻序列往往會有很多動態物體,而自監督訓練本身就是基于靜態環境假設,動態環境下會失效。
2023-11-28 09:21:341452 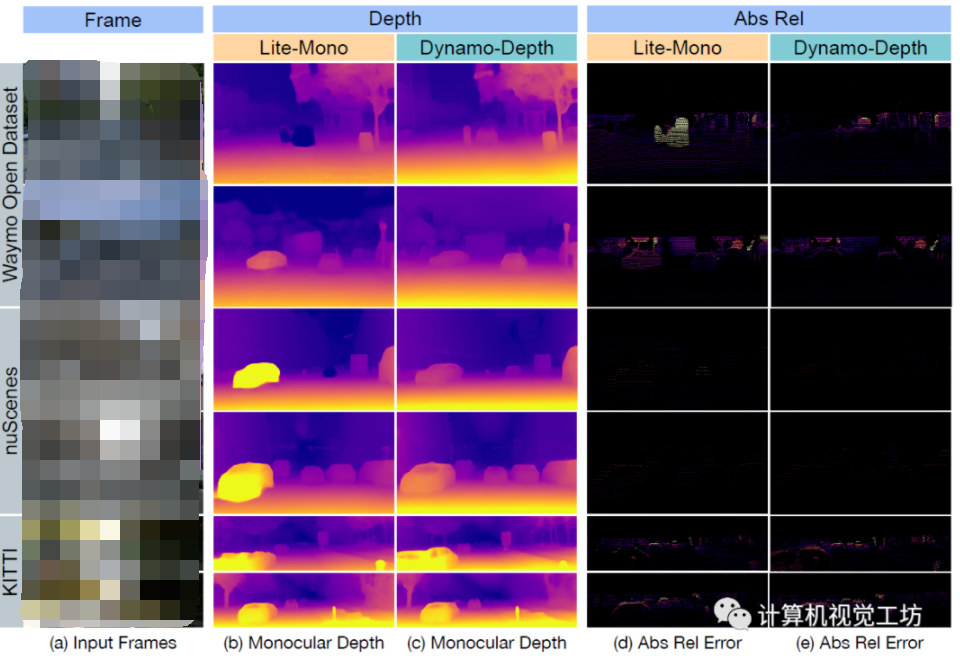
可以看一下單目深度估計效果,這個深度圖的分辨率是真的高,物體邊界分割的非常干凈!這里也推薦工坊推出的新課程《單目深度估計方法:算法梳理與代碼實現》。
2023-12-17 10:01:161572 
本文提出了一種全新的學習型PatchMatch MVS框架,DS-PMNet,并嵌入了DeformSampler。這個框架能夠以端到端的方式學習隱含深度分布,指導可變形的深度采樣。
2024-01-02 09:25:281585 
本研究提出了一種自監督的多攝相機3D占據預測方法,名為OccNeRF。該方法旨在解決無界場景的建模問題。
2024-01-02 14:53:531009 
運動恢復結構(SfM)是計算機視覺領域一個長期存在的問題,旨在根據每個相機拍攝的圖像來估計場景的3D幾何結構以及觀測該場景的相機的參數。由于它方便地同時為相機和地圖提供信息,因此構成了許多實用計
2024-10-28 14:13:002663 
?Firefly所推出的NVIDIA系列的AIBOX可實現深度估計,該技術是一種從單張或者多張圖像預測場景深度信息的技術,廣泛應用于計算機視覺領域,尤其是在三維重建、場景理解和環境感知等任務中起到
2025-03-19 16:33:02979 
本文提出了一種穩健的單目視覺SLAM系統,該系統同時利用點、線和消失點特征來進行精確的相機位姿估計和地圖構建,有效解決了傳統基于點特征的SLAM的局限性。
2025-03-21 17:07:08930 
轉化為三維信息,從而為車輛決策提供關鍵的深度感知能力。 什么是雙目深度估計? 平時我們用眼睛看東西其實就是一種最自然的深度估計。人的兩只眼睛有一定的間距,大腦通過融合兩只眼睛看到的略有不同的圖像來判斷遠近。計算
2025-12-31 09:45:50295 
 電子發燒友App
電子發燒友App

















 工商網監
工商網監
評論