 電子發燒友App
電子發燒友App



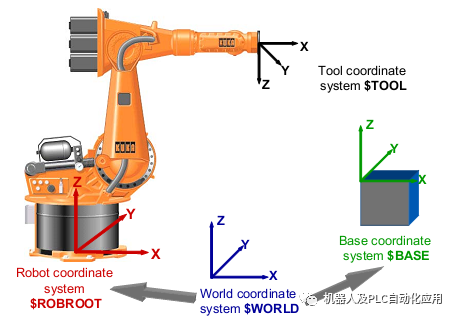
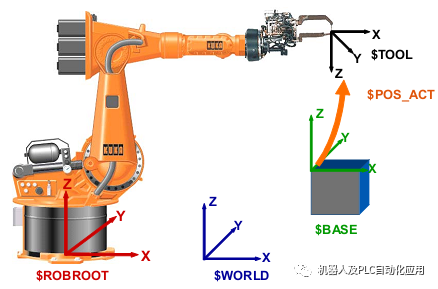
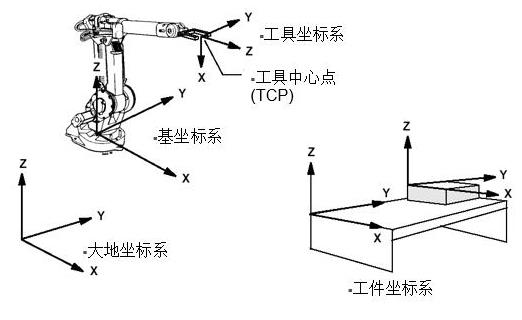
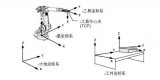
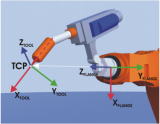
坐標系
以插補周期速率 (12 ms) 進行坐標變換
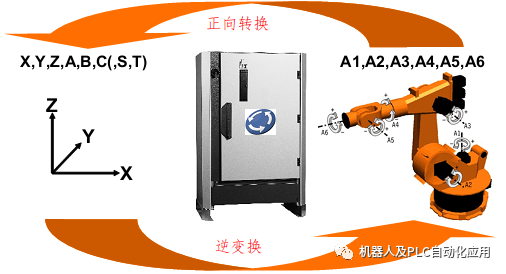
笛卡爾坐標系
具有與基礎相關的插值的運動序列
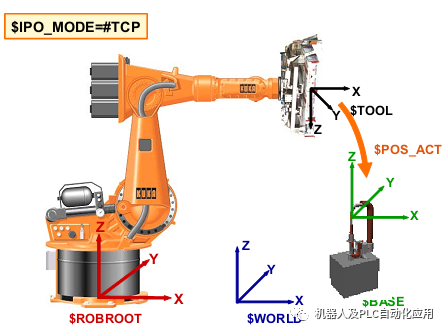
帶有刀具相關插補的運動序列
軸運動 - PTP
運動類型概述
KUKA 機器人運動類型(插補類型)
PTP:軸的運動,兩點之間的最快運動。控制器計算所需的角度差。
LIN:TCP運動,當前活動刀具的 TCP 沿直線從起點移動到終點。
CIRC:TCP運動,當前活動刀具的 TCP 沿定義的圓形路徑移動。

? 在執行程序之前,必須首先建立程序段重合(BCO)。
? 這是通過在選擇程序后按住開始鍵來完成的。
? 機器人以降低的速度自動移動
? 機器人到達編程路徑后,可以通過再次按下啟動鍵繼續程序
建議第一次和最后一次運動都使用 HOME 跑,因為這代表了一個明確定義的非關鍵位置。
在自動外部模式下不執行 BCO 運行!
PTP 運動 - 簡化:
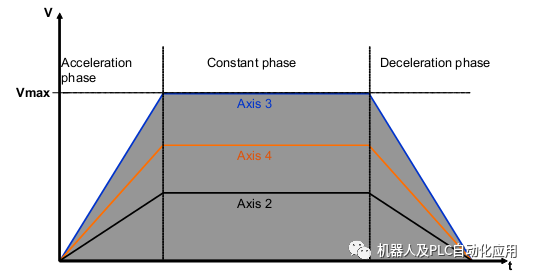
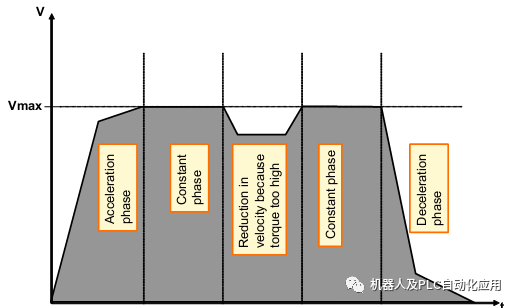
PTP 運動 – 更高的運動輪廓,較高的運動曲線用作 PTP 運動的標準。
PTP 運動 - 軸特定
在執行 PTP 運動之前,必須初始化軸速度和加速度。值以 % 指定。
DEF PTP_AXIS ( )
INT X
INI ;Initialization
...
FOR X=1 TO 6
$ACC_AXIS[X]=70 ;Modification of the axis accelerations
$VEL_AXIS[X]=70? ?;Modification of the axis velocities
ENDFOR
...
PTP {AXIS: A1 0, A2 –90, A3 90, A4 0, A5 0, A6 0}
...
END
DEF PTP_AXIS ( )
INT X
INI ;初始化
...
FOR X=1 TO 6
$ACC_AXIS[X]=70 ;軸加速度的修改
$VEL_AXIS[X]=70? ?;修改軸速度
ENDFOR
...
PTP {AXIS: A1 0, A2 –90, A3 90, A4 0, A5 0, A6 0}
...
END
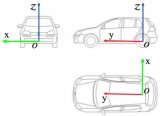
PTP 運動 - 笛卡爾:使用笛卡爾坐標輸入終點時,還必須定義基礎坐標系和工具坐標系。
DEF PTP_AXIS ( )
INT X
INI
$BASE=BASE_DATA[1] ;Setting the base coordinate system
$TOOL=TOOL_DATA[3] ;Setting the tool coordinate system
FOR X=1 TO 6
$ACC_AXIS[X]=70? ? ? ? ? ;Modification of the axis accelerations
$VEL_AXIS[X]=70? ? ? ? ? ?;Modification of the axis velocities
ENDFOR?
...
PTP {POS:X 1025, Y 0, Z 1480, A 0, B 0, C 0}
...
END
DEF PTP_AXIS ( )
INT X
INI
$BASE=BASE_DATA[1] ;設置基礎坐標系
$TOOL=TOOL_DATA[3] ;設置工具坐標系
FOR X=1 TO 6
$ACC_AXIS[X]=70? ? ? ? ? ;軸加速度的修改
$VEL_AXIS[X]=70? ? ? ? ? ?;修改軸速度
ENDFOR?
...
PTP {POS:X 1025, Y 0, Z 1480, A 0, B 0, C 0}
...
END
軸特定的絕對和相對運動
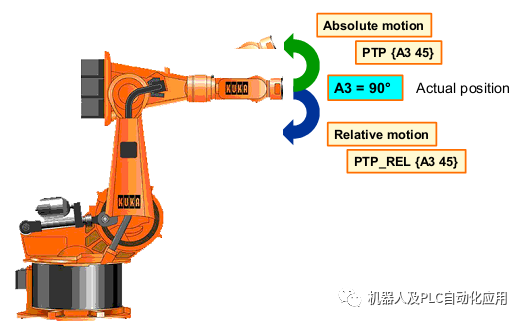
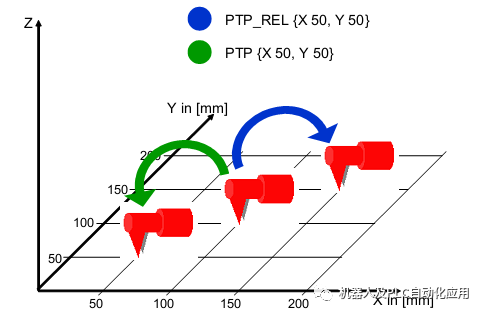
笛卡爾絕對和相對運動
連續路徑運動 - LIN 和 CIRC
在執行 TCP 運動之前,必須初始化路徑、回轉和旋轉速度和加速度。
$ACC.CP??路徑速度
$ACC.ORI1?回轉速度
$VEL.CP?轉速
$VEL.ORI1路徑加速
$ACC.ORI2?回轉加速度
$VEL.ORI2??旋轉加速度
調用基本包的初始化序列時,TCP 運動的速度和加速度的默認設置也預設為機床數據或 $CONFIG.DAT 中定義的最大值。
DEFDAT $CONFIG
...
; CP - MOVEMENTS? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
;----------------------------------
DECL CIRC_TYPE DEF_CIRC_TYP=#BASE
REAL DEF_VEL_CP=2.00
REAL DEF_VEL_ORI1=200.0
REAL DEF_VEL_ORI2=200.0
REAL DEF_ACC_CP=2.3
REAL DEF_ACC_ORI1=100.0
REAL DEF_ACC_ORI2=100.0
...
ENDDAT
程序中的第一個運動必須是 PTP 運動。
DEF CPMOTION ( )
INI
$BASE=BASE_DATA[1] ;設置基礎坐標系
$TOOL=TOOL_DATA[3] ;設置工具坐標系
$VEL.CP=1.0 ;速度的修改
$VEL.ORI1=150
$VEL.ORI2=100
$ACC.CP=1.7 ;加速度的修改
$ACC.ORI1=80
$ACC.ORI2=80
...
PTP HOME
LIN {X 1050, Z 900} ;絕對坐標規格
LIN_REL {X 100, Y 250, Z 125};相對距離規格
...
END
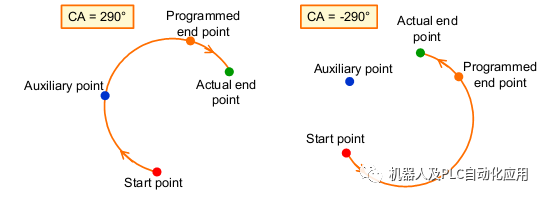
圓周運動:
CIRC Aux_Point , End_Point ,? CACircular_Angle
Aux_Point? ?輔助點坐標 - 通過聚合或數據列表中點的點名稱指定
Circular_Angle??CA = 圓角以度為單位的圓角
End_Point?終點坐標 - 通過聚合或數據列表中點的點名稱指定
使用集合指定輔助點或終點時,請確保正確分配工具和基礎坐標系!
CA > 0°按編程方向執行圓弧:起點-輔助點-終點
CA < 0°以與編程相反的方向執行圓弧:起點 - 終點 - 輔助點
“計算”出的目的地點的方位角與“修飾”的目的地點的方位角相同。
審核編輯:劉清



















 工商網監
工商網監
評論