") Frenet坐標系,自動駕駛“混亂”的源頭
Frenet坐標系,自動駕駛“混亂”的源頭

人類駕駛員在道路上開車的時候,沒有人會去基于當前距離出點的橫向和縱向距離是多少,而去決定下一步的方向盤轉角大小。通常情況,我們只會關注車輛當前距離左右車道線的距離,來判斷是否偏離車道,是否需要打方向盤進行方向微調(diào)。
自動駕駛運動規(guī)劃也在效仿這一過程,而為了讓這一過程得以實施,2010年,BMW的Moritz Werling在2010年的論文《Optimal Trajectory Generation for Dynamic Street Scenarios in a Frene′t Frame》中提出了Frenet坐標系。
沒錯,還是國外人發(fā)明,我們整天鼓吹自動駕駛第一大國,但看看自動駕駛常用的基礎理論、經(jīng)典架構、基礎軟件、經(jīng)典算法……,有多少是我們的發(fā)明創(chuàng)造!每個場景都炒一波自動駕駛概念,每個概念都拉一波融資,每一波融資都用來重復造輪子……。大而不強,是自動駕駛繼承自汽車產(chǎn)業(yè)的頑疾。
Frenet坐標下的出現(xiàn),讓規(guī)劃、控制有了方向,但也從此開啟了自動駕駛萬國混戰(zhàn)的源頭。
01Frenet坐標系的定義
Frenet坐標系的建立基于一個參考線,這個參考線可以是任意曲線,但在自動駕駛運動規(guī)劃中一般定義為道路的中心線,這條中心線是地圖模塊輸入過來的一系列離散點。同時使用參考線的切線向量和法線向量建立一個直角坐標系,如圖1所示,這個坐標系就是Frenet坐標系。
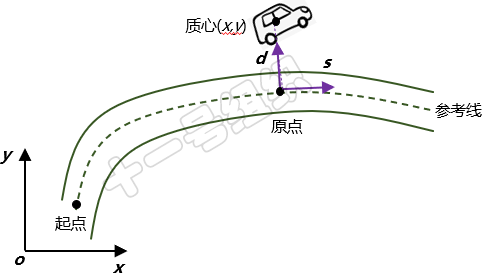
圖1 Frenet坐標系示意圖
某一時刻,假設車輛質心在全局笛卡爾坐標系下的坐標為(x,y),車輛質心到參考線上的投影點稱為原點,原點切線方向稱為s軸方向或縱軸方向,原點法線方向稱為d軸方向或橫軸方向。縱坐標s值指的是參考線上的原點與起點之間曲線的長度,也就是車輛在道路上的縱向行駛距離。橫坐標d值指的是原點與車輛質心之間的距離,也就是車輛偏離道路中心線的距離。車輛質心隨著時間在不斷變化,因此Frenet坐標系的原點也在不斷變換,所以Frenet坐標系是一個移動坐標系。
02為什么使用Frenet坐標系
(一)道路表達直觀
假設現(xiàn)在我們知道笛卡爾坐標系下車輛的位置為(x,y),在道路通常都有一定曲率的背景下,從這個坐標中我們無法得知道路在哪里,也不知道車輛行駛了多遠,更難以確定它是否偏離車道中心。當然我們可以從輸入的高精地圖數(shù)據(jù)進行計算獲得上述數(shù)據(jù),但是計算量太大,因此用笛卡爾坐標系描述道路會非常復雜。
而在Frenet坐標系中,橫軸和縱軸相互垂直且原點所在參考線與車道中心線平行,容易確定車輛偏離車道中心線的距離以及車輛沿車道中心線的行駛距離。因此使用Frenet坐標系可以忽略道路曲率的影響,讓道路表達更加直觀、簡潔。
(二)簡化路徑規(guī)劃問題
運動規(guī)劃是為了獲得車輛在未來一段時間內(nèi)具有前瞻性的行駛軌跡,這個軌跡是一種由二維空間和一維時間組成的三維空間中的曲線。
在笛卡爾坐標系下,整車的橫向運動、縱向運動耦合在一起,想要計算清楚兩者的關系還是需要費一番苦力的。而在Frenet坐標系中,距離參考線的位置可以使用縱向距離s和橫向距離d分別表示,而通過對時間分別求導,又可以得到縱向運動速度和橫向運動速度。
車輛的二維運動問題在Frenet坐標系下被解耦成兩個一維運動問題,而一維優(yōu)化問題要比二維優(yōu)化問題更容易容易求解。因此相比于笛卡爾坐標系,F(xiàn)renet坐標系可以明顯地簡化運動規(guī)劃問題,這就是運動規(guī)劃中笛卡爾坐標系轉換為Frenet坐標系的必要性。
下面我們用一個例子來解釋Frenet坐標系的這種降維作用。假設行為決策層判斷前方有低速行駛的車輛,隨后在t0時刻做出了一個在t1時刻完成變道的決策。即車輛需要在Δt=(t1-t0)時間內(nèi),橫向上需要完成一個Δd以及縱向上完成一個Δs的移動。如圖2所示,我們可以將s和d分別表示為關于t的函數(shù):s(t)和d(t),這樣二維運動規(guī)劃問題被分割成了兩個獨立的一維優(yōu)化問題。
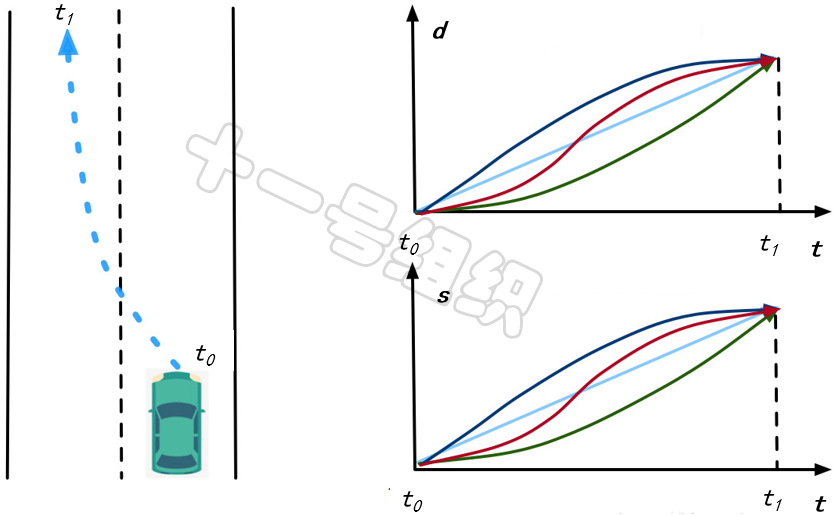
圖2 Frenet坐標系下運動規(guī)劃示例
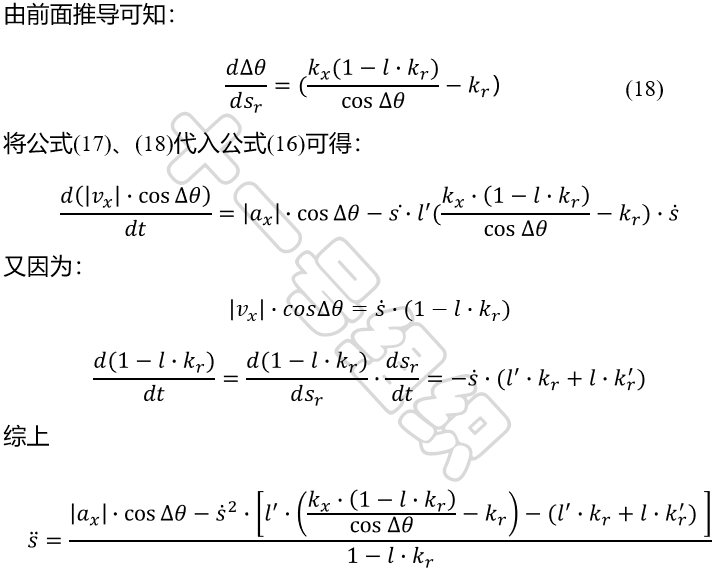
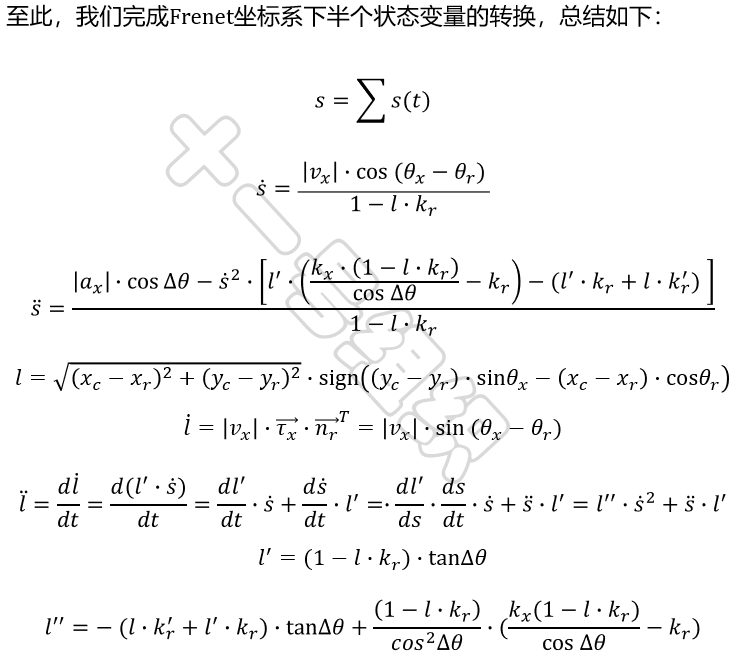
03Frenet坐標系與笛卡爾坐標系轉換
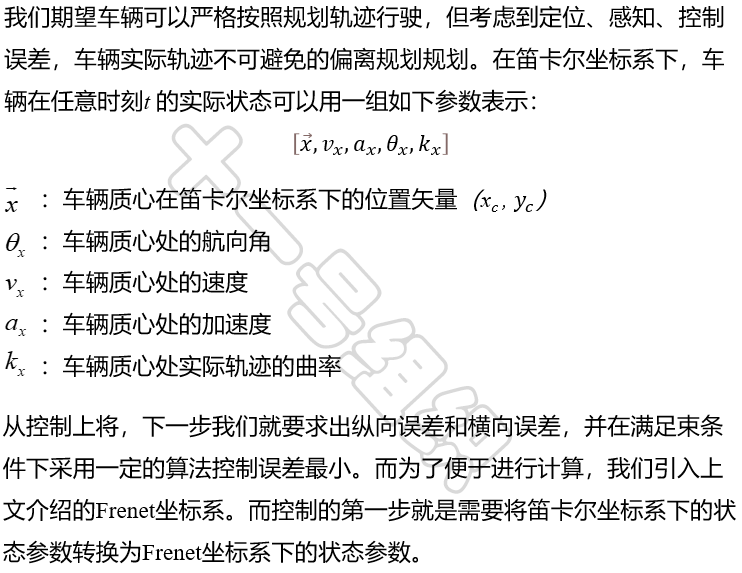
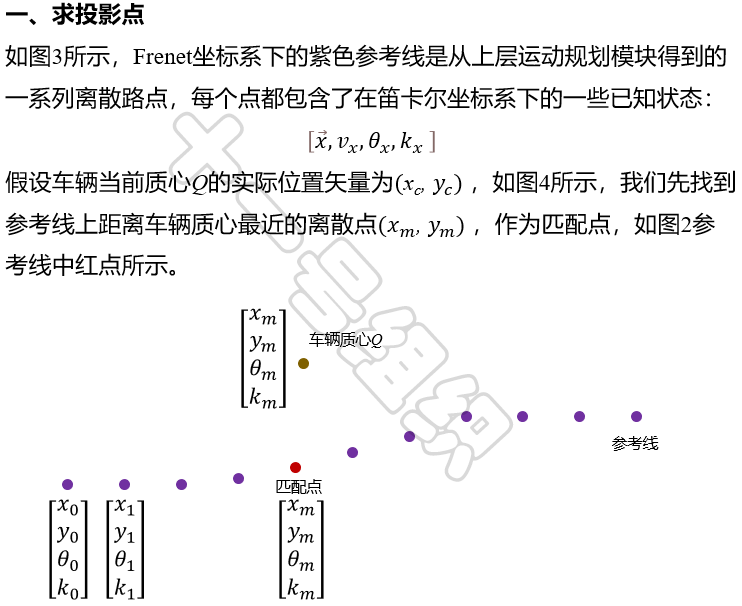
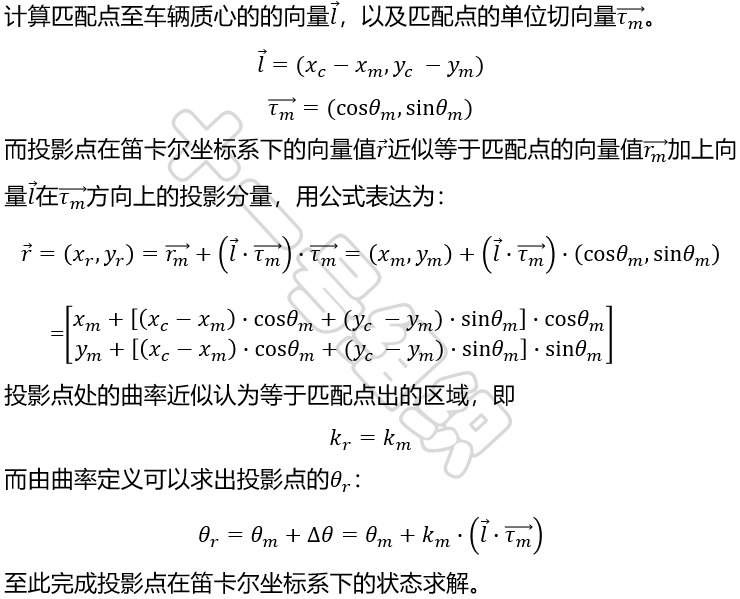
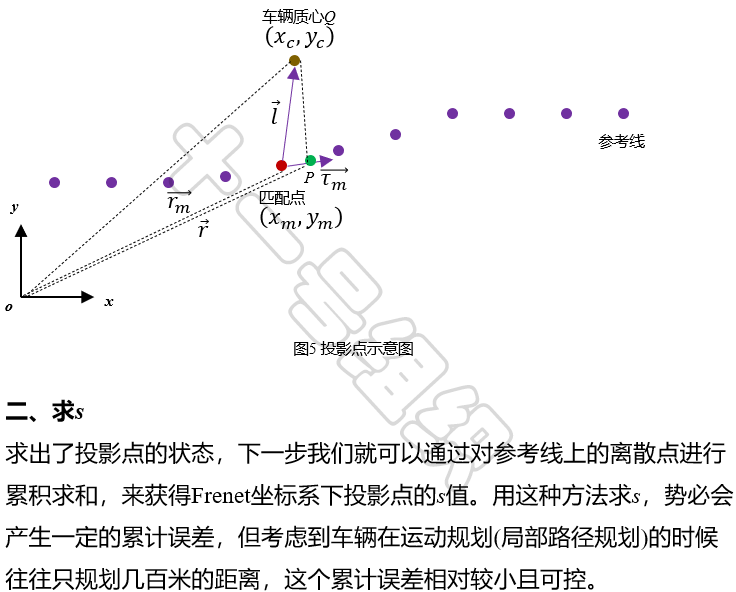
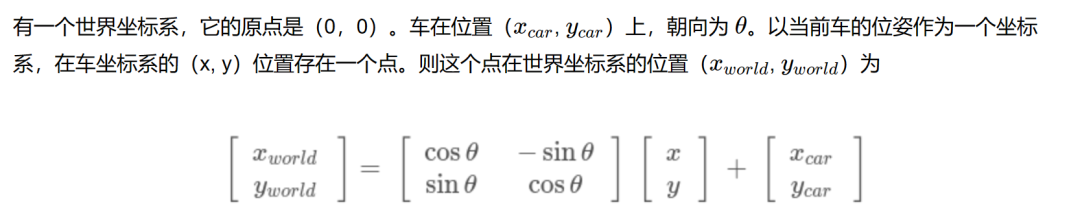
要使用Frenet坐標系進行運動規(guī)劃,就需要將笛卡爾坐標系下的車輛狀態(tài)轉化為Frenet坐標系下的狀態(tài)。由于公式太多,只能采用圖片方式呈現(xiàn)后續(xù)內(nèi)容。
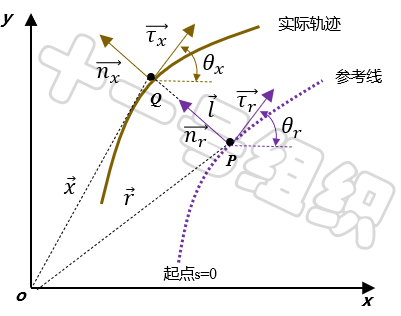
圖3 Frenet坐標系和笛卡爾坐標系下的狀態(tài)表示
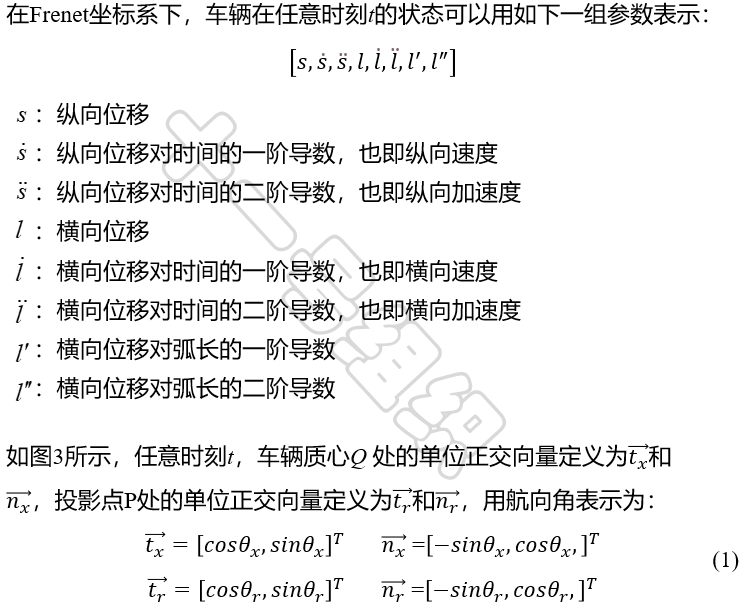
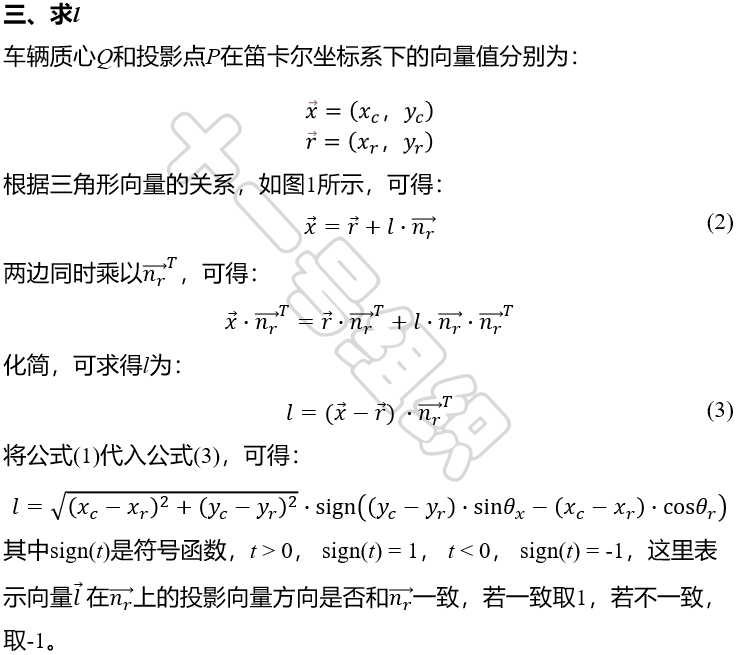
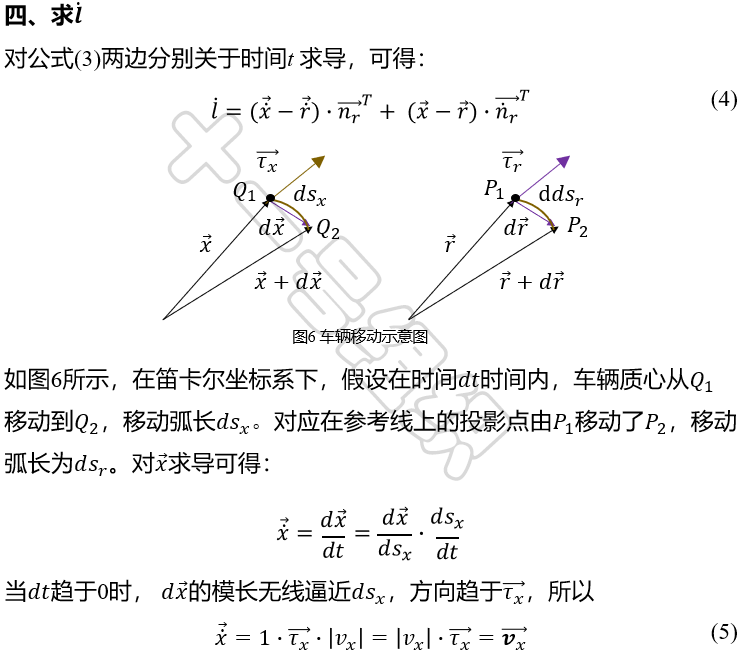
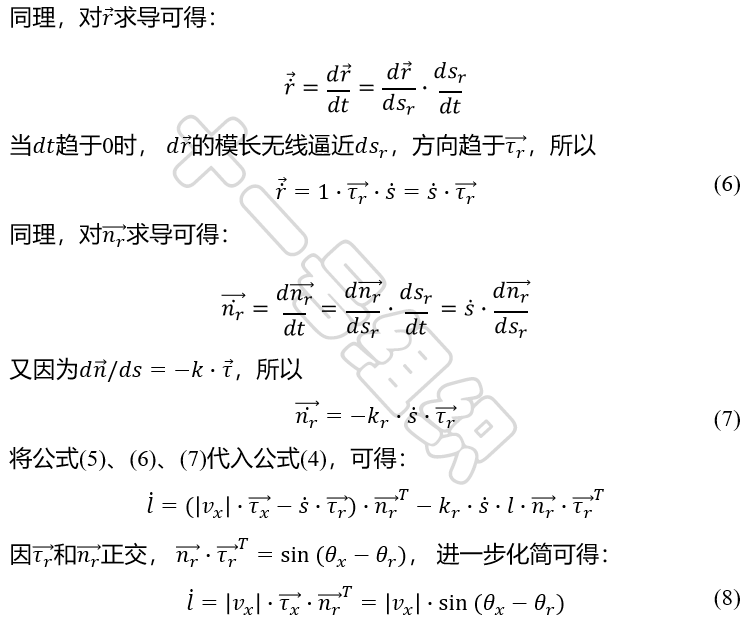
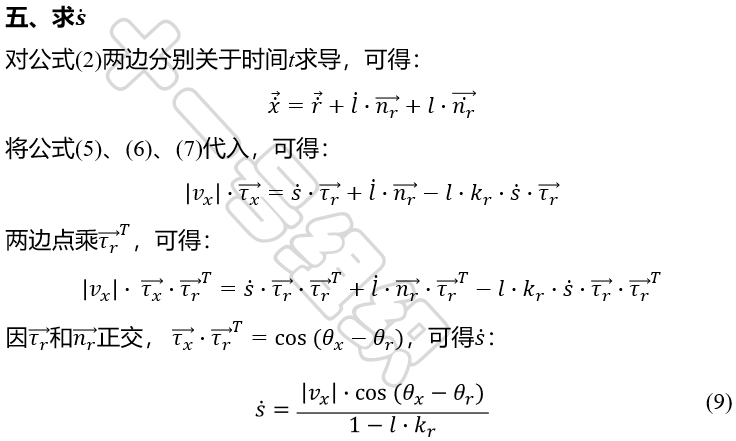
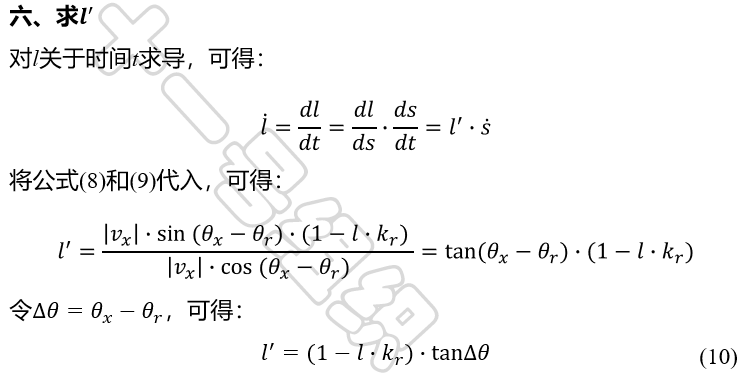
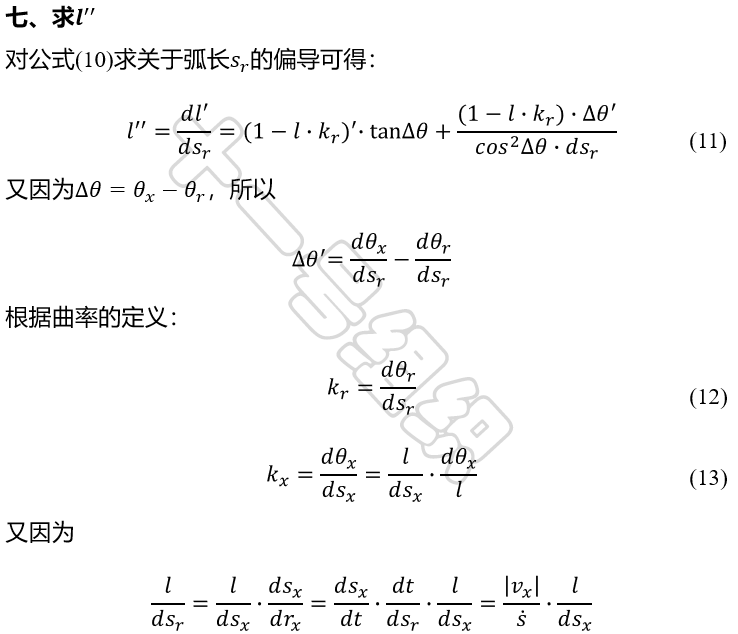
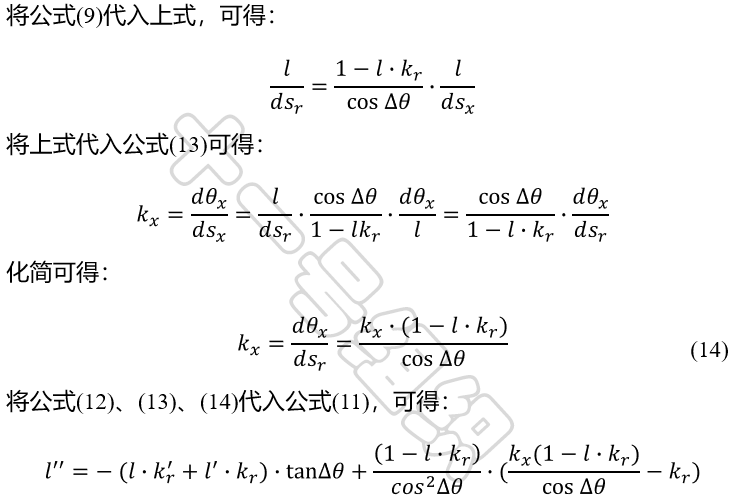
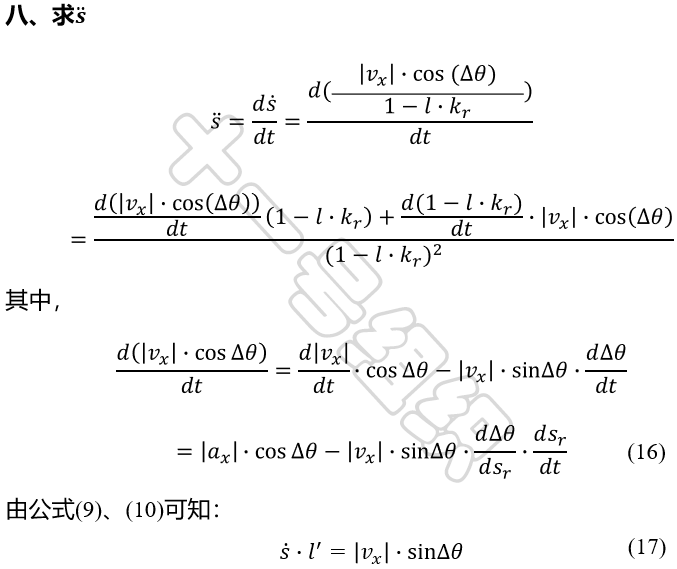

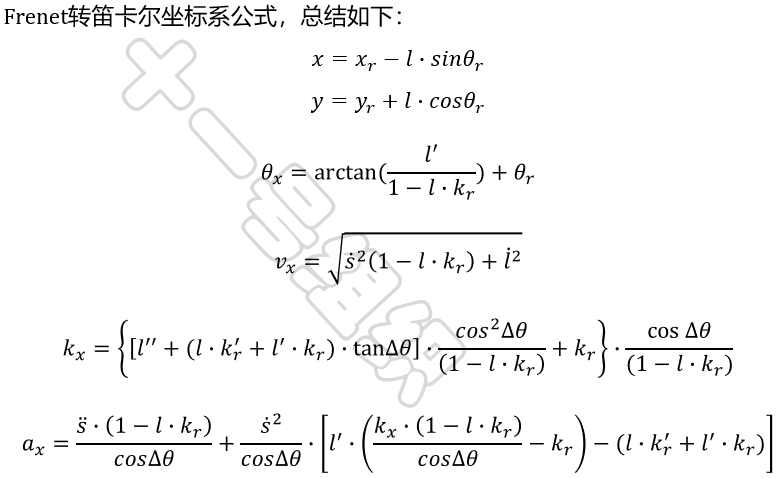
基于Frenet坐標系進行運動規(guī)劃,將輸出單獨的橫、縱向軌跡,而最終輸出到自動駕駛車輛參考運動軌跡需要可直接被控制模塊所應用,因此最后還需要把Frenet坐標系下得到的軌跡轉化到一個全局笛卡爾坐標系中。逆過程過于簡單,下面直接給出結論。
04寫在最后
Frenet坐標系的熟練掌握,應該是規(guī)劃控制入門的第一課,也是開啟你自動駕駛混亂時代的第一課。
審核編輯 :李倩
-
控制模塊
+關注
關注
2文章
146瀏覽量
19802 -
向量
+關注
關注
0文章
55瀏覽量
12036 -
自動駕駛
+關注
關注
793文章
14879瀏覽量
179778
原文標題:Frenet坐標系,自動駕駛“混亂”的源頭
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
坐標系與魚雷運動參數(shù)

OPENGL坐標系介紹 世界坐標系和當前繪圖坐標系區(qū)別

一種基于Frenet坐標系的優(yōu)化軌跡動作規(guī)劃方法
自動駕駛各個坐標系

自動駕駛中的各種時空坐標系
自動駕駛里面的三個坐標系
自動駕駛規(guī)劃算法基礎之frenet與笛卡爾cartesian坐標系的轉換
自動駕駛車輛控制(車輛運動學模型)
三坐標如何建立坐標系?

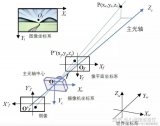
世界坐標系、相機坐標系、圖像坐標系、像素坐標系之間的關系

淺談自動駕駛技術常用坐標系統(tǒng)關聯(lián)和轉換
深度剖析機器人的四大坐標系

自動駕駛坐標變換意義與類型
應用衛(wèi)星通信領域的一個坐標轉換過程—機體坐標系與ENU坐標系的轉換




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論