 GNSS仿真測試之三種常用坐標系與轉換
GNSS仿真測試之三種常用坐標系與轉換

作者介紹
在當今的全球導航衛星系統(GNSS)技術領域,仿真測試是評估和驗證GNSS接收機性能的關鍵環節,全球導航衛星系統(GNSS)仿真測試是確保GNSS接收機和導航解決方案在實際部署前能夠正確、可靠地工作的關鍵步驟。無論是為了確保定位精度、測試信號干擾的影響,還是評估在復雜環境下的導航可靠性,掌握正確的坐標系知識對于進行有效的仿真測試至關重要。
在GNSS仿真測試的領域,三種關鍵的坐標系構成了我們工作的核心:地心地固坐標系(ECEF)、地理坐標系(LLA,包括緯度、經度和海拔高度)以及本地水平坐標系(ENU,即東-北-上)。
本文不僅將詳細介紹這三種坐標系的概念和特點,還將探討它們在GNSS仿真測試中的具體應用。我們將學習如何在實際的仿真環境中使用這些坐標系,以及如何在不同坐標系之間進行精確的轉換。這些轉換對于確保仿真測試的準確性至關重要,因為它們允許我們將衛星的全球位置與接收機的局部視角相匹配。掌握這些坐標系的轉換技能都將極大地提升您在GNSS仿真測試中的工作效率和成果的質量。
一、坐標系介紹
1.ECFF(Earth-Centered, Earth-Fixed)
ECEF坐標系是一個笛卡爾坐標系,一般中文叫做地心地固坐標系,其原點位于地球質心,X軸通過本初子午面和赤道的交點,Y軸位于赤道面上,通過東經90度,Z軸指向北極點。這個坐標系隨著地球一起旋轉,因此它固定在地球上。比如,鳥巢的ECEF坐標約為(-2175804.26,4383129.27,4077167.07),單位為米(m)。
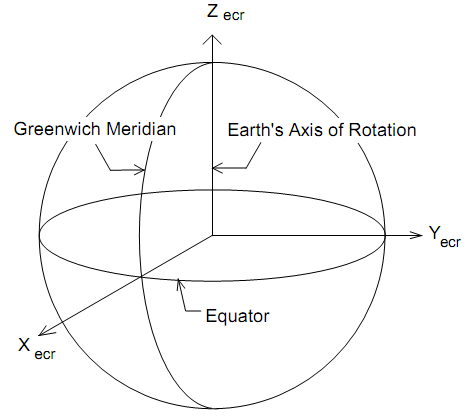
在ECEF坐標系中,地球上的任何點都可以用三個坐標值(X, Y, Z)來表示,分別表示該點相對于地球質心的位置。這個坐標系對于全球定位系統(GPS)和其他GNSS系統尤其重要,因為衛星的位置通常以ECEF坐標來表示,經常被用來精確描述衛星的位置和計算衛星與接收機之間的距離。
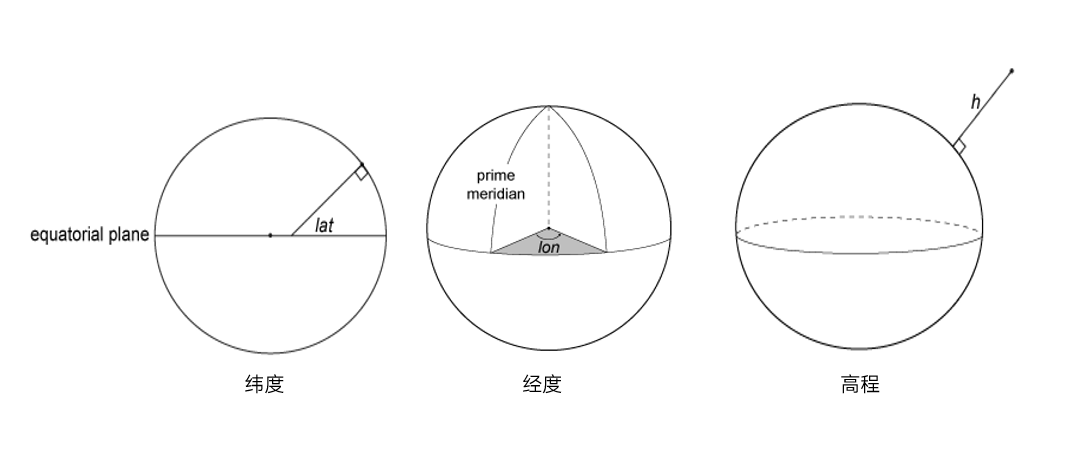
2.LLA(Latitude, Longitude, Altitude)
LLA坐標系是一個球面坐標系,一般稱為地理坐標系,或根據三軸命名為緯經高坐標系,用于描述地球上某一點的位置。它由三個參數組成:
● 緯度(Latitude):指從赤道(0度緯度)到北極(90度北緯)或南極(90度南緯)的角度測量,它確定了地球表面上一個點的東西位置,范圍為-90°~90°,
● 經度(Longitude):指從本初子午線(0度經度,通過格林尼治天文臺)到東經或西經的角度測量,它確定了地球表面上一個點的南北位置,范圍為-180°~180°(或0~360°),
● 海拔高度(Altitude):指從地球表面(通常是平均海平面)到某一點的垂直距離。這個高度可以是從參考橢球體(如WGS84橢球體)的表面計算出的幾何高度,也可以是從平均海平面計算出的正高或從大地水準面計算出的正常高。
比如,鳥巢的LLA坐標為(39.99°,116.40°,50m)。
LLA坐標系是我們在日常生活中最常接觸到的坐標系,如地圖制作、導航和地理信息系統(GIS)中廣泛使用,或用于將地球表面的位置轉換為其他坐標系。在GNSS仿真測試中,LLA坐標系常用于定義接收機的初始位置和移動路徑。
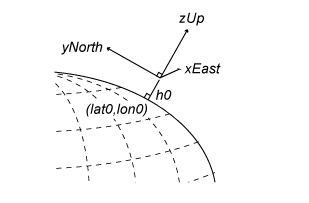
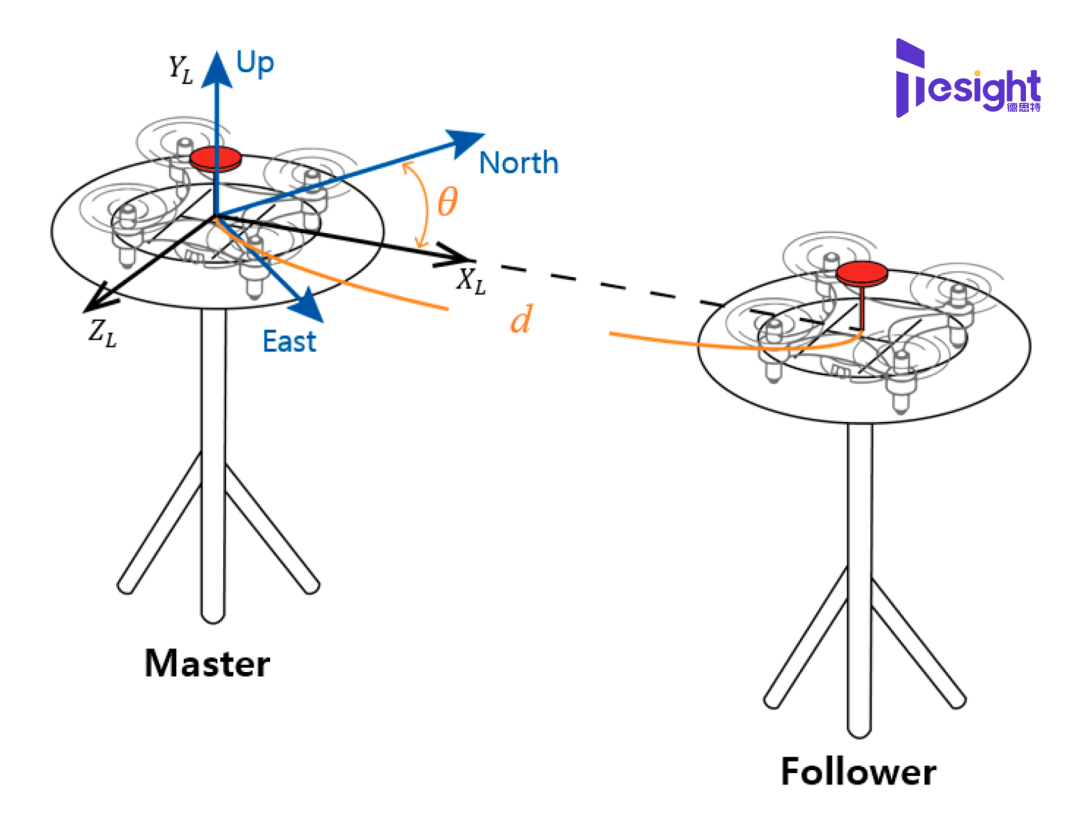
3.ENU(East-North-Up)
ENU坐標系是一個笛卡爾坐標系,是一個局部的本地水平坐標系,也稱為東北天(東北上)坐標系。其原點位于地球表面上的一個特定點,通常與接收機的位置相對應。在ENU坐標系中,東軸(East)指向當地的東方向,北軸(North)指向當地的北方向,上軸(Up)垂直于水平面,指向天空。本地原點由大地坐標( lat0、lon0、h0 )描述。請注意,原點不一定位于橢球體的表面上。
若以鳥巢本身為原點,那么他的ENU坐標為(0,0,0),單位為m。
ENU坐標系常用于描述接收機附近的物體運動,如車輛的行駛軌跡或無人機的飛行路徑,因為它提供了一個與接收機位置直接相關的坐標系。
4.三個坐標系的對比
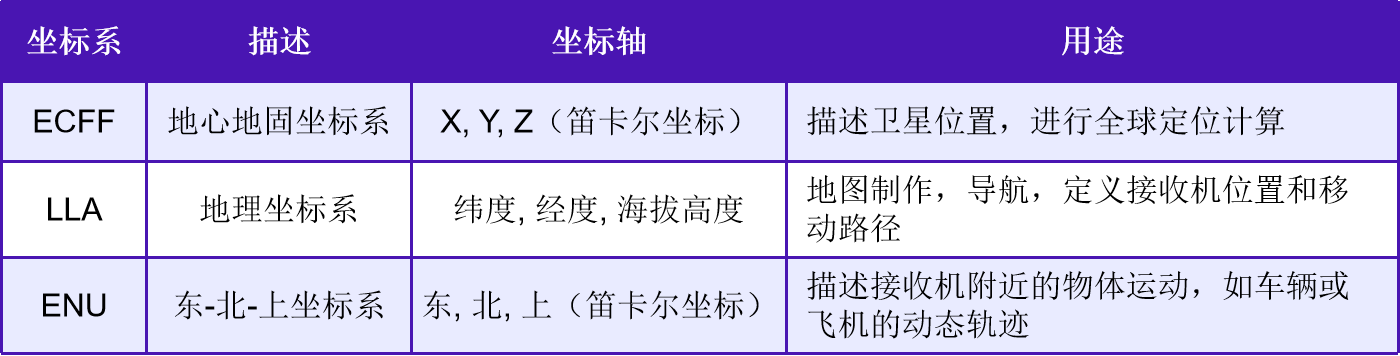
除此之外,還有一些常用的坐標系,例如NED坐標系(東北下坐標系)、AER坐標系(方位角-仰角-范圍本地坐標系)等。
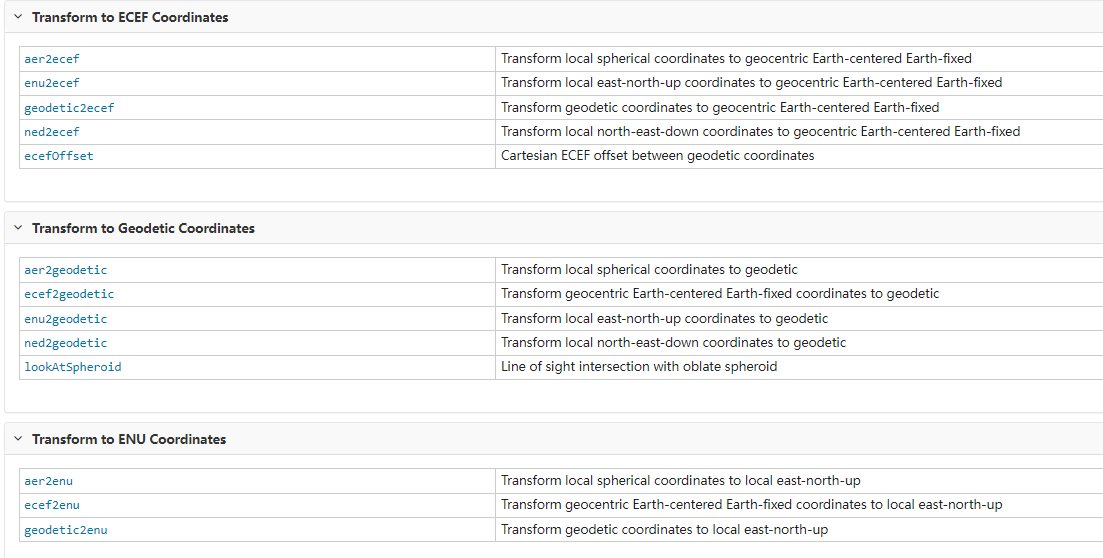
二、三個坐標系的轉換
ECEF(地心地固坐標系)、LLA(地理坐標系)和ENU(東-北-上坐標系)之間的轉換是通過一系列數學公式實現的。以下是這些坐標系之間轉換的基本方法:
1.ECEF到LLA的轉換:
這種轉換涉及到從笛卡爾坐標(X, Y, Z)到球面坐標(緯度, 經度, 海拔高度)的轉換。
● 首先,可以通過X和Y坐標計算出經度,通過Z坐標和地球的扁率計算出緯度。
● 然后,使用地球的參考橢球模型(如WGS84)來計算海拔高度。
2.LLA到ECEF的轉換:
這種轉換是從球面坐標到笛卡爾坐標的轉換。
● 經度和緯度可以直接用于計算ECEF坐標中的X和Y值。
● 海拔高度和地球的參考橢球模型用于計算Z值。
3.ECEF到ENU的轉換:
這種轉換通常需要一個參考點,該點的LLA坐標已知。
● 首先,將參考點的ECEF坐標轉換為LLA坐標。
● 然后,使用參考點的LLA坐標,通過一系列旋轉和平移變換,將ECEF坐標轉換為ENU坐標。
4.ENU到ECEF的轉換:
這是ECEF到ENU轉換的逆過程。
● 首先,根據參考點的LLA坐標計算坐標點的LLA坐標
● 經度和緯度可以直接用于計算ECEF坐標中的X和Y
● 海拔高度和地球的參考橢球模型用于計算Z值。
這些轉換涉及到復雜的數學計算,包括球面三角學、旋轉矩陣和橢球幾何學。
在實際應用中,這些轉換通常通過專業的數學庫或GIS軟件來實現,如PROJ、GDAL或MATLAB的地理工具箱等。
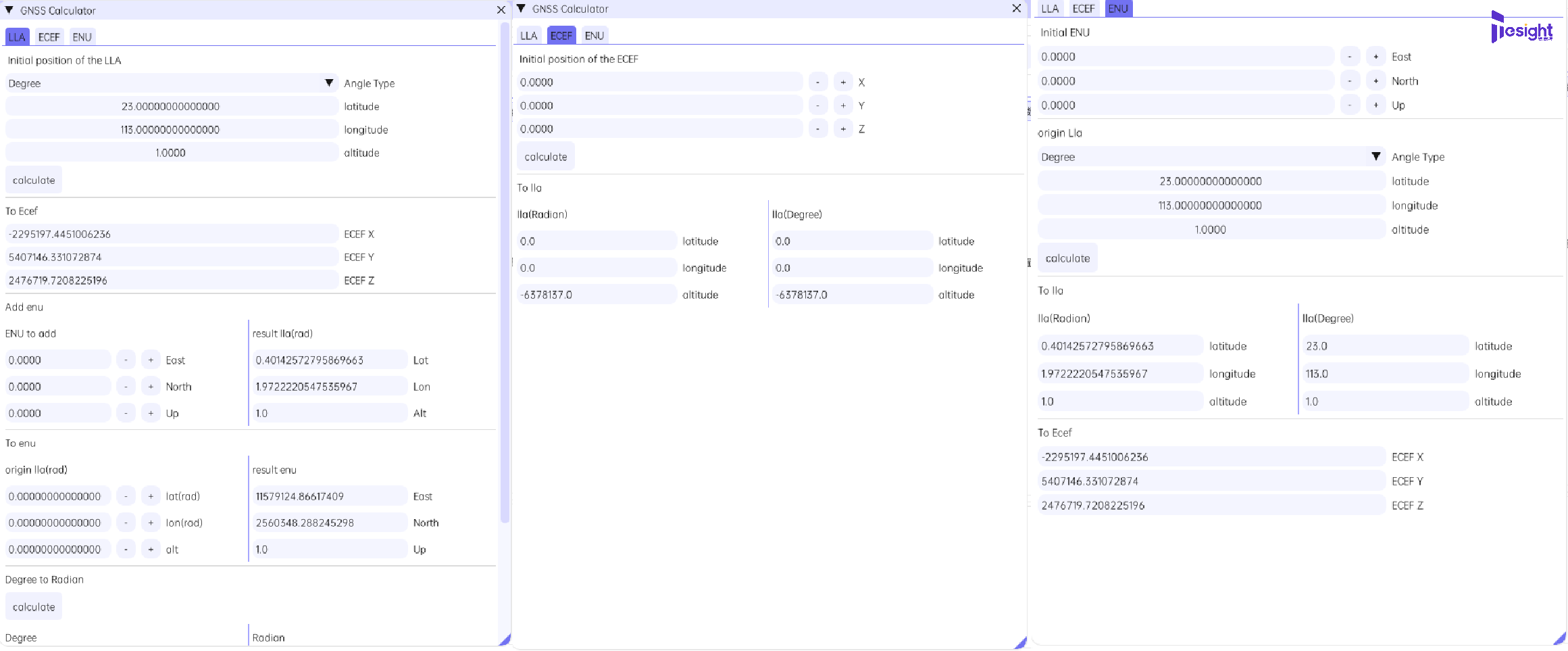
德思特AutoTest自動化測試平臺為用戶提供三種坐標軸的快速轉換工具,簡單輸入現有坐標點即可完成對其他兩個坐標系的轉換。
審核編輯 黃宇
-
GNSS
+關注
關注
9文章
990瀏覽量
51143 -
仿真測試
+關注
關注
0文章
115瀏覽量
11792
發布評論請先 登錄
告別代碼迷宮!exgnss擴展庫讓GNSS定位開發秒變簡單
三坐標和激光跟蹤儀的不同之處

操作筆記 | GNSS模擬仿真軟件Skydel如何讓所有衛星輸出的功率一致?
傳感器數據計算質心位移軌跡,結果不理想
三相異步電機矢量控制的研究
開關電源三種控制模式:PWM/PFM/PSM
VirtualLab Fusion應用:Ince-Gaussian模式

CMOS,Bipolar,FET這三種工藝的優缺點是什么?
克拉克變換&帕克變換:電機界的“變形金剛”雙人組
RTK技術揭秘:基線長度如何決定厘米級定位精度?




 工商網監
工商網監
評論