") 激光跟蹤儀的機(jī)器坐標(biāo)系是不固定的
激光跟蹤儀的機(jī)器坐標(biāo)系是不固定的

激光跟蹤儀的機(jī)器坐標(biāo)系是不固定的。
激光跟蹤儀是采用球坐標(biāo)系測(cè)量系統(tǒng),在測(cè)量的時(shí)候,是需要操作者手拿測(cè)量靶球,激光跟蹤儀射出一道激光主動(dòng)跟蹤測(cè)量靶球,在操作者將靶球接觸待測(cè)工件表面時(shí),激光跟蹤儀精確采集該點(diǎn)的三維坐標(biāo)并上傳至測(cè)量軟件,通過在工件上采集若干點(diǎn),即可在軟件上根據(jù)采集的點(diǎn)位坐標(biāo),擬合成需要的點(diǎn)、線、面、球等特征,分析擬合的特征,可得到對(duì)應(yīng)的形位公差數(shù)據(jù),也可將工件的三維模型導(dǎo)入測(cè)量軟件,進(jìn)行實(shí)物與數(shù)模的三維比對(duì),得到三維比對(duì)數(shù)據(jù),從而分析出實(shí)物與設(shè)計(jì)狀態(tài)的差異,實(shí)現(xiàn)精準(zhǔn)檢測(cè)。
RobotMaster機(jī)器人檢測(cè)校準(zhǔn)套件
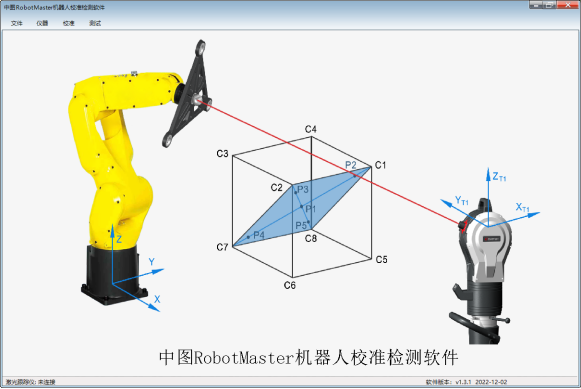
基于GTS激光跟蹤儀的RobotMaster機(jī)器人套件為工業(yè)機(jī)器人空間絕對(duì)位置精度測(cè)量標(biāo)定和性能檢測(cè)提供高效可行的解決方案,既提供基于光學(xué)靶球的經(jīng)濟(jì)方案,也提供基于6D姿態(tài)智能傳感器的增強(qiáng)方案。
●機(jī)器人標(biāo)定校準(zhǔn)軟件
根據(jù)機(jī)器人的D-H參數(shù)建立機(jī)器人校準(zhǔn)數(shù)學(xué)模型,進(jìn)行機(jī)器人零位校準(zhǔn),機(jī)器人D-H參數(shù)校準(zhǔn),機(jī)器人TCP中心點(diǎn)精度校準(zhǔn)。在不改變現(xiàn)有機(jī)器人任何結(jié)構(gòu)和硬件尺寸的條件下,通過機(jī)器人校準(zhǔn)標(biāo)定軟件有效的提高機(jī)器人絕對(duì)位姿精度。
●機(jī)器人性能檢測(cè)軟件
按照ISO 9283工業(yè)機(jī)器人性能規(guī)范及其實(shí)驗(yàn)方法完成機(jī)器人性能檢測(cè),檢測(cè)內(nèi)容包括:
機(jī)器人位姿準(zhǔn)確度、位姿重復(fù)性、多方向位姿準(zhǔn)確度變動(dòng)、距離準(zhǔn)確度、距離重復(fù)性、位置穩(wěn)定時(shí)間、位置超調(diào)量、位姿特性漂移、互換性、軌跡準(zhǔn)確度、軌跡重復(fù)性、拐角偏差、軌跡速度特性、靜態(tài)柔順性等。
-
機(jī)器
+關(guān)注
關(guān)注
0文章
798瀏覽量
41926 -
激光跟蹤儀
+關(guān)注
關(guān)注
0文章
86瀏覽量
9233
發(fā)布評(píng)論請(qǐng)先 登錄
ZEISS GEAR PRO 一鍵搞定特殊齒輪高精度測(cè)量

磐時(shí)助力坐標(biāo)系純機(jī)電線控制動(dòng)系統(tǒng)通過TüV北德ISO 26262 ASIL-D功能安全認(rèn)證

一次講清TOA 測(cè)距與衛(wèi)星定位基礎(chǔ):原理 + 坐標(biāo)系

固定式測(cè)斜儀日常維護(hù)成本高不高?

矢量網(wǎng)絡(luò)分析儀與示波器的技術(shù)分野

矢量網(wǎng)絡(luò)分析儀與示波器的區(qū)別
三坐標(biāo)和激光跟蹤儀的不同之處

激光干涉儀:解鎖協(xié)作機(jī)器人DD馬達(dá)的精度密碼

激光跟蹤儀為生命護(hù)航:X射線計(jì)算機(jī)斷層掃描成像系統(tǒng)檢測(cè)的應(yīng)用
鴻蒙地圖功能開發(fā)【3. 代碼開發(fā)】##地圖開發(fā)##
傳感器數(shù)據(jù)計(jì)算質(zhì)心位移軌跡,結(jié)果不理想
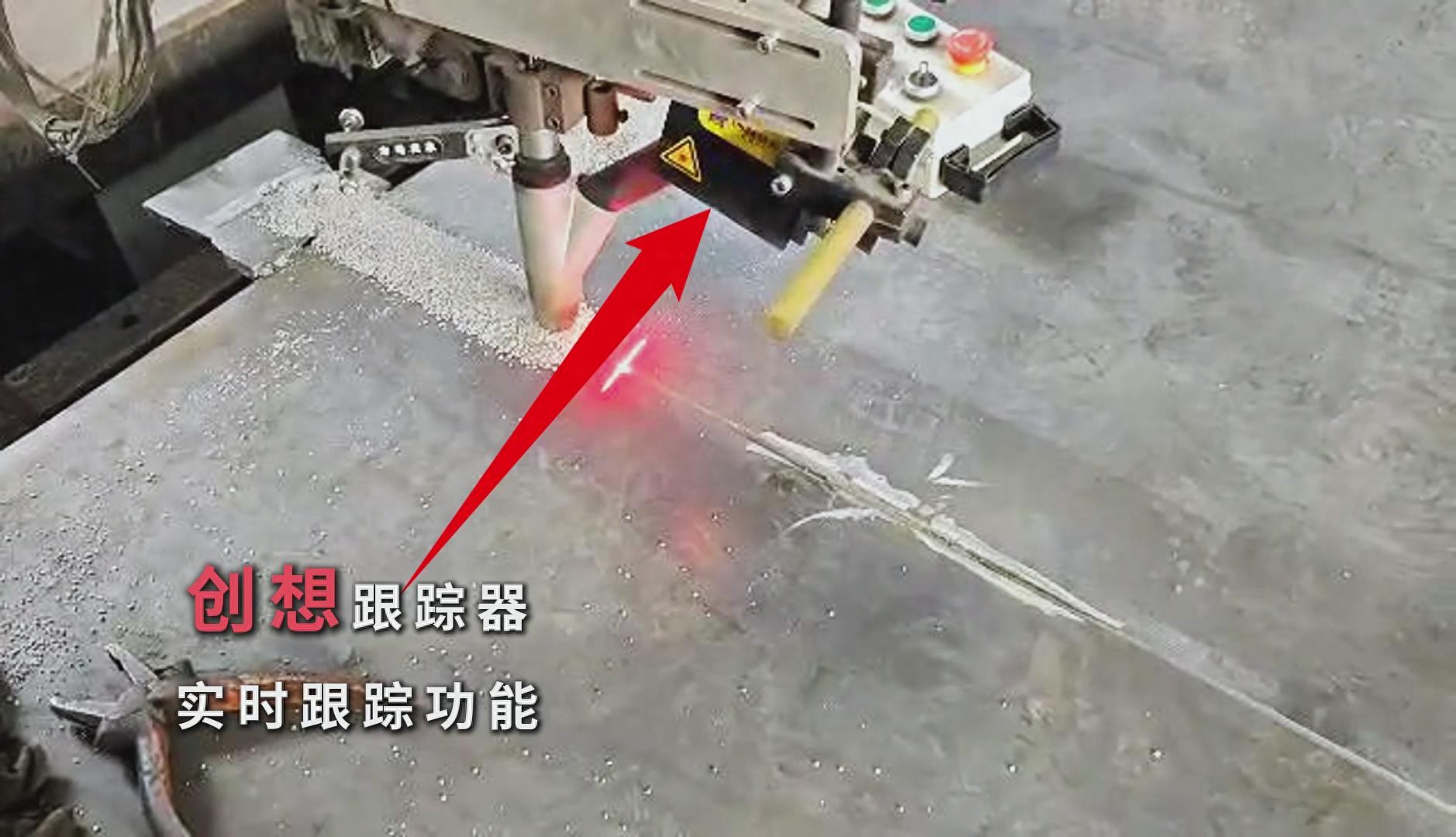
創(chuàng)想智控激光焊縫跟蹤系統(tǒng)助力管道行業(yè)專機(jī)埋弧焊智能化升級(jí)
固定式測(cè)斜儀的數(shù)據(jù)存儲(chǔ)和導(dǎo)出方式有哪些?

激光跟蹤儀:三大工業(yè)領(lǐng)域的“精準(zhǔn)之眼”,高效賦能智能制造




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論