 帶你來剖析機器人的坐標系吧!
帶你來剖析機器人的坐標系吧!

機器人的坐標系,你知道多少 ?真的會使用坐標系嗎?下面我來帶你來剖析機器人的坐標系吧!(以ABB機器人舉例說明)
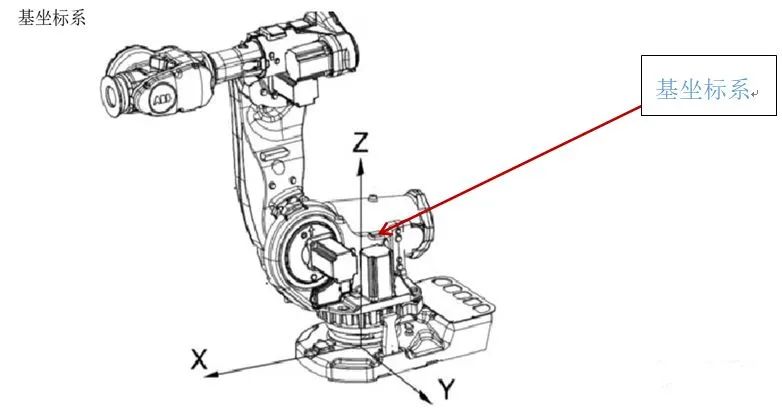
1. 基坐標系
基坐標系是以機器人安裝基座為基
準、用來描述機器人本體運動的直角坐標系。
任何機器人都離不開基坐標系,也是機器人TCP在三維空間運動空間所必須的基本坐標系(面對機器人前后:X軸 ,左右:Y軸, 上下:Z軸)。
坐標系遵守右手準則:
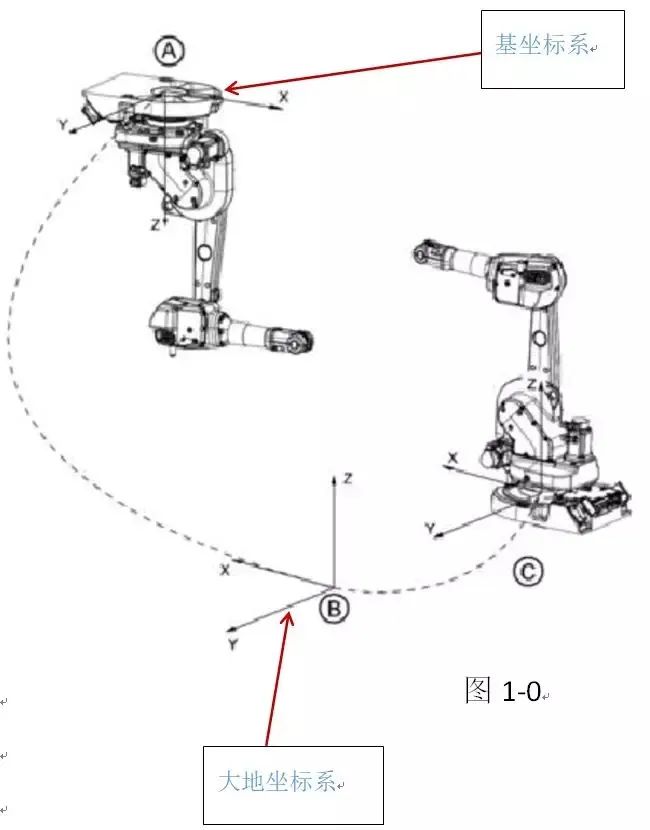
2. 大地坐標系
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合:
(1)機器人倒裝。
如圖1-0,倒裝機器人的基坐標與大地坐標Z軸的方向是相反,機器人可以倒過來,但是大地卻不可以倒過來。
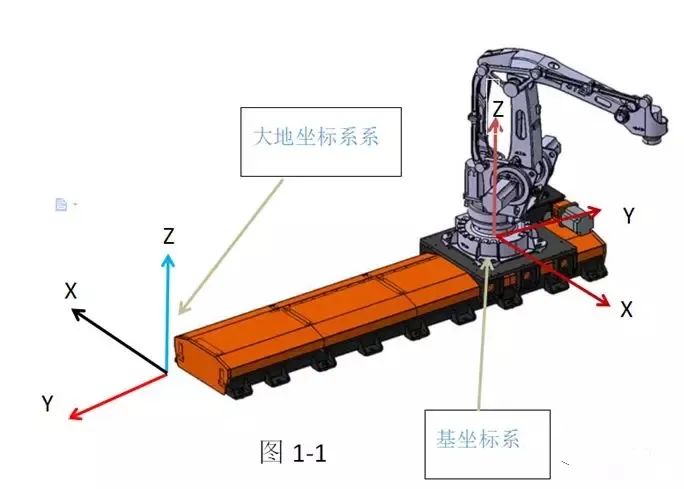
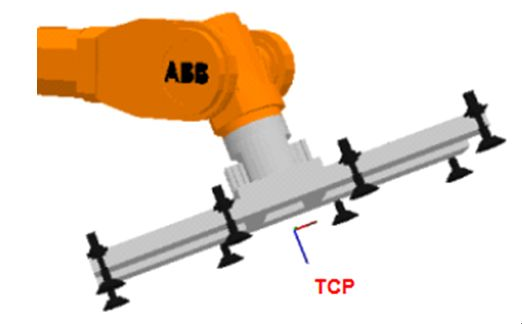
(2)帶外部軸的機器人。如圖1-1,大地坐標系固定好位置,而基坐標系卻可以隨著機器人整體的移動而移動。
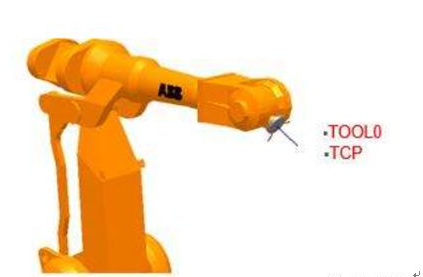
3. 工具坐標系
工具坐標系:是以工具中心點作為零點,機器人的軌跡參照工具中心點,不再是機器人手腕中心點Tool0(如圖1-2)了,而是新的工具中心點(如圖1-3)。
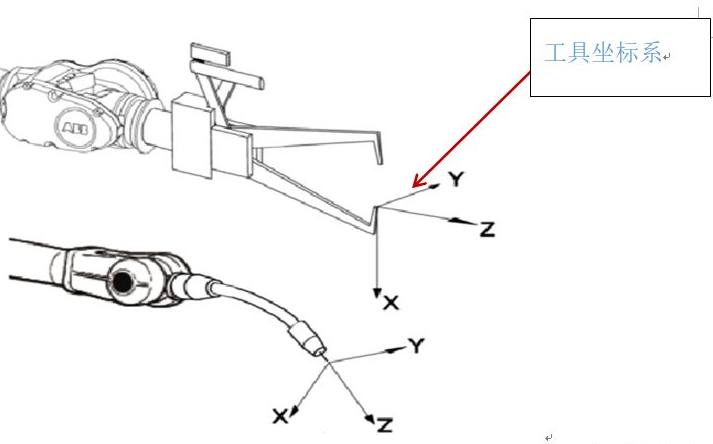
例如:焊接的時候,我們所使用的工具是焊槍,所以可把工具坐標移植為焊槍的頂點。而用吸盤吸工件時使用的是吸盤,所以我們可以把工具坐標移植為吸盤的表面(如圖1-5)。
4. 工件坐標系
工件坐標系:工件坐標系是以工件為基準的直角坐標系,可用來描述TCP運動的坐標系。
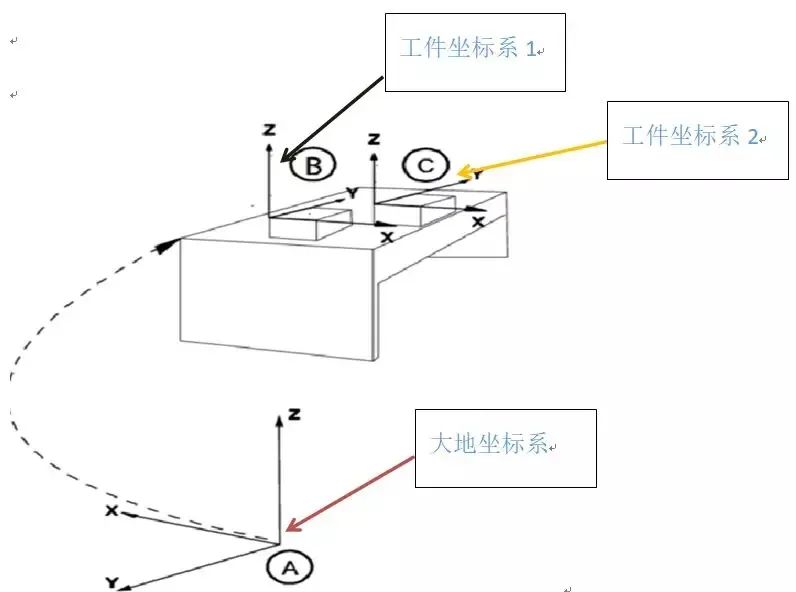
充分利用工件坐標系能讓我們編程達到事半功倍的效果。
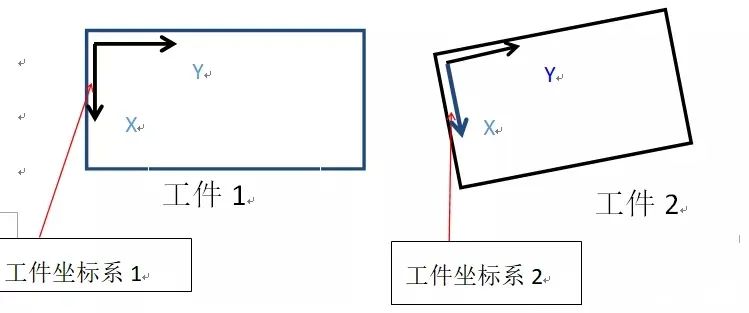
例如:機器人加工工件1,軌跡編程已經編好,另外有工件2,軌跡不需要重復編程只要把工件坐標系1改為工件坐標系2即可。
-
機器人
+關注
關注
213文章
31311瀏覽量
223362 -
三維空間
+關注
關注
0文章
19瀏覽量
7874
原文標題:機器人4大坐標系講解,別在搞混了!
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
機器人主控核心板米爾RK3576 + ROS2,NPU加速實現目標跟隨與機械臂抓取
磐時助力坐標系純機電線控制動系統通過TüV北德ISO 26262 ASIL-D功能安全認證

一次講清TOA 測距與衛星定位基礎:原理 + 坐標系

RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
工業機器人的特點
輪式移動機器人電機驅動系統的研究與開發
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
邁來芯傳感器解決方案助力打造下一代智能機器人系統
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用




 工商網監
工商網監
評論