KUKA庫卡C4機器人驅動器故障報警維修庫卡機器人維修內容包括庫卡機器人示教器維修,KUKA伺服驅動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
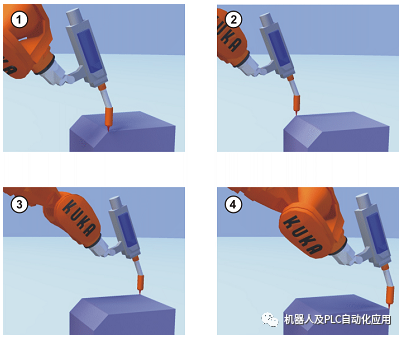
1 開機坐標系無效 世界坐標系是以槍頭為基點,在這種坐標系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標系中移動,槍頭也隨著改變方向,那就是我們在
2019-07-15 07:48:36
KUKA庫卡機器人伺服驅動器(Servo Drive)是KUKA運動控制的重要組成部分,被普遍應用于工業機器人及數控加工中心等自動化設備中。是用來控制伺服電機的一種控制器,其作用類似于變頻器作用于
2020-09-08 16:30:28
可能使電動機或機械件損壞。當完成接線后,在通電之前,必須進行電源線和電動機殼體之間的絕緣測量。3、庫卡機器人伺服電機編碼器的更換:如庫卡機器人伺服電動機的編碼器不良,就應更換脈沖編碼器。KUKA機器人
2020-09-26 16:51:21
這個是KUKA重型機器人處理和測量混凝土軌枕的視頻。處理得相當精細。真心值得愛好機器者和愛國者研究研究。
2015-02-03 15:18:31
有沒有機器人比較全的資料
2017-03-21 12:35:21
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
labview 視覺機器人抓取工件 CCD相機的二維坐標系的建立?希望分享,謝謝
2017-08-18 20:53:37
止機器人啟動時產生過劇烈的運動。 速度和加速度傳感器 速度傳感器有測量平移和旋轉運動速度兩種,但大多數情況下,只限于測量旋轉速度。利用位移的導數,特別是光電方法讓光照射旋轉圓盤,檢測出旋轉頻率和脈沖數
2018-11-08 15:55:32
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
現在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
想弄一個vi可以動態顯示機器人的姿態,但不知道有什么函數可以引入機器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
過程中,機器人的移動方向如果相對于機器人坐標系向后移動,則需勾選此項。 對樁方法 Docking Method: 對樁方法分為“激光回充”與“紅外回充”兩種,詳情請參見KBSW180149
2019-01-24 14:42:36
移動機器人有沒有推薦的MCU,萌新求大佬幫助
2020-11-03 11:41:09
各位論壇前輩你們好,我是一名在校的即將升入大二學生,專業課暫時只學了c,電路分析基礎和工程制圖。我跟另外4個同學正在參加學校的機器人比賽,在機器人創意表演方面,就突發奇想,是否能做一個可以彈簡單
2017-05-22 17:09:06
ARM機械手臂有各種形狀和大小。機械臂是機器人的一部分,用來定位末端執行器和傳感器來完成編程任務。許多(但不是全部)類似于人類的手臂,有肩膀,肘部,手腕,甚至手指。這給了機器人很多方法來定位它自己在它
2022-03-31 10:31:31
機器人有哪些種類?大家來說說
2014-12-25 10:01:32
機器人有哪些類型?
2021-06-18 06:41:57
機器人的電機傳動控制坐標系是怎樣確定的,是基于什么控制原理,學習機器人的控制理論有哪些比較經典的書籍,求大神指導?
2013-06-10 17:03:57
。 1、自由度 機器人具有的獨立坐標軸運動的數目。機器人的自由度是指確定機器人手部在空間的位置和姿態時所需要的獨立運動參數的數目。手指的開、合,以及手指關節的自由度一般不包括在內。.機器人的自由度
2017-08-15 14:00:52
機器人的優缺點有哪些?機器人是由哪些部分組成的?
2021-10-11 07:51:29
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
、KUKA、Yaskawa Motoman、FANUC2.2.1 本體結構本體結構分類:不同機器人建模控制的本質區別關節型機械臂:串聯垂直多關節6軸機器人SCARA機械臂:笛卡爾機械臂:Delta并聯機械臂:雙平行四邊形機械臂(碼垛機器人)其他類型機械臂:圓柱形、球坐標符號表示機器
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
技術研發將會越來越受重視。本文所開發的機器人作品以盛群半導體八位微控制器(MCU)為核心,具有計程、位置推算、紅外線傳感避障、中文語音提示、地磁角度測量、地磁角度修正等功能,使用個人計算機(PC)或
2019-06-27 07:02:14
通過2D和3D進行。 采用機器人可以完成一些特定的測量任務 測量系統的核心部分是工業機器人。但機器人并非單純只是一種操作系統,同時它也與測量計算機進行通信聯絡,因此可以完成一些特定的測量任務
2015-02-11 17:15:03
兒童陪護機器人越來越受到人們的關注,其中轉動控制是其重要組成部分之一。步進電機芯片作為一種常用的控制芯片,被廣泛應用于兒童陪護機器人中的轉動控制。本文將從步進電機芯片的工作原理、優勢和應用場景等方面
2023-05-11 15:12:45
空間的軌跡構造方法,包括直線、圓弧、NURBS自由曲線等軌跡的構造方程。
模型機器人測試與仿真:通過LabVIEW編程,項目在PC端實現了算法和運動仿真。六軸模型機器人被用作實體測試對象,通過模塊化方法
2023-12-21 20:03:18
本帖最后由 yezwsj1 于 2020-8-31 10:41 編輯
首先安裝robot interfaceV3.0,然后利用ActiveX建立自動化應用,程序如下圖可以實時訪問機器人坐標。
2020-06-10 11:08:37
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
清潔機器人是服務機器人的一種,所謂服務機器人是指自主或半自主的、從事非生產活動、能完成有益于人類健康的服務工作的機器人。家庭清潔機器人集機械、電子、傳感器、計算機、控制、機器入技術、人工智能等諸多
2019-09-05 06:56:37
機器人按臂部的運動形式分為四種。直角坐標型的臂部可沿三個直角坐標移動;圓柱坐標型的臂部可作升降、回轉和伸縮動作;球坐標型的臂部能回轉、俯仰和伸縮;關節型的臂部有多個轉動關節。工業機器人按執行機構運動
2015-01-19 10:58:38
問:什么是服務機器人?答:根據國際機器人聯合會(InternationalFederationofRobotics,IRF)的定義,服務機器人是一種半自主或全自主工作的機器人,它能幫助人類完成除生產
2021-09-17 07:49:47
介紹坐標系以及它們之間的變換關系,數學的意味還是很濃的。講了那么多的公式和規律,它們要怎么用在機器人上呢?這篇文章將介紹坐標系和機器人之間的紐帶即連桿坐標系。完成這篇文章的介紹之后我們就可以利用一些
2021-09-01 06:17:14
,運動學部分從坐標變換人手,介紹了正向運動學方程的建立、逆向運動學的求解以及機器人的微分運動等內容。控制結構篇著重介紹機器人的傳感技術、位置控制和力控制。針對機器人控制領域的研究動態和主要研究方向,先進控制篇介紹了傳感信息融合、視覺控制、協調控制、移動機器人技術、智能控制方法等。
2017-09-19 15:30:57
工業機器人的四大特征是哪些?工業機器人是由哪些部分組成的?工業機器人是怎樣進行劃分的?
2021-10-11 09:10:17
隨著論壇的發展壯大,內容也逐漸豐富起來,許多車友,尤其是新人面對如此多的資料信息難免感到一片混亂,故工作室特意用本帖將目前本站所擁有的智能小車機器人資源進行整理,做成一個索引,方便大家查找學習
2012-10-11 17:41:02
`華南機器人應用培訓中心擁有各種設備,開展各種不同的機器人培訓班。打造各種工業現場常見的機器人工作站,現開展KUKA、發那科、三菱、ABB、愛普生工業機器人培訓對外招生。 一、認識機器人技術:工業
2015-09-02 14:03:18
/VALproduct/uniVAL三種編程方法滿足集成商、最終用戶、設備商的不同需求。可實現多機器人同步,人機協作。)作為一種成本低廉、系統結構簡單的自動化機器人系統解決方案,多軸機器人可以被應用于點膠、滴塑、噴涂
2020-07-29 06:57:04
現代噴涂作業中機器人噴涂已經越來越成為一種趨勢。國外機器人噴涂技術較為成熟,其研究工作早在20世紀60年代就已經開始,目前的噴涂機器人市場依然由國外公司的機器人品牌主導,如德國的KUKA公司、瑞典
2021-12-20 08:06:23
、逆向運動學求解,以實現機器人的操作空間坐標和關節空間坐標的相互轉換,完成機器人的軌跡規劃任務,實現高速伺服插補運算、伺服運動控制。控制器主要分為硬件和軟件兩部分:硬件是指工業控制板卡,包括主控單元
2017-08-23 15:10:27
工業機器人一般由主構架(手臂)、手腕、驅動系統、測量系統、控制器及傳感器等組成。 1圖是工業機器人的典型結構。機器人手臂具有3個自由度(運動坐標軸),機器人作業空間由手臂運動范圍決定。手腕是機器人
2015-01-19 10:36:12
)對給定機械臂,己知各關節角矢量g(f)=[gl(t),g2(t),......gn(i)]',其中n為自由度。求末端操作器相對于參考坐標系的位置和姿態,稱之為運動學正問題。在機器人示教過程中。機器人
2017-12-15 10:25:19
時間的積累。本文以KUKA為例,分協作機器人iiwa和傳統機器人KR兩個大系列。協作機器人iiwa 當前主流的協作機器人都采用“模塊化”思想的關節設計,采用直驅電機+諧波減速器的方式,每個關節的內部結構
2018-11-01 11:08:12
工業機器人是近兩年機械行業最熱的字眼,隨著企業工業機器人的增多,很多機械工程師對于工業機器人充滿了好奇。作為機器人四大家族之一的KUKA,已經被美的收購,小編這就帶你走近KUKA工業機器人的內部結構
2021-07-05 06:44:21
差速移動機器人軌跡跟蹤控制方法一、引言二·、基礎準備1.去除GPS數據中的壞點2.經緯度與平面坐標系轉換3.差速移動機器人數學建模三、基于PID的差分移動機器人軌跡跟蹤方法1、控制律設計2、航向角
2021-09-01 08:41:30
; G:自動運行狀態速度修改; H:啟動機器人正常運行。 2、外部cell程序通過IO選擇程序啟動 庫卡KUKA機器人四種啟動方式外部自動選擇cell程序啟動方式,是指在庫卡機器人未選擇任何程序,打到
2020-09-04 15:45:41
KUKA庫卡機器人MGV電源模塊維修PH1013-2840MGV電源維修 庫卡電源模塊維修 機器人電源模塊維修 庫卡控制器維修 KUKA電源維修KUKA庫卡機器人電源模塊維修MGV控制器維修
2021-09-08 07:30:00
關于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
智能監控機器人是近年來機器人應用工程中一項前沿性的題目,智能化探測小車是智能行走機器人的一種。智能監控機器小車就是針對上述情況,在參考了目前大多數智能機器人的基礎上,以降低成本為原則設計的。小車具備
2019-10-14 07:37:52
20世紀以來隨著電子技術的不斷發展,以及人類對于自身的不斷了解,機器人的研究也在不斷的深入。現階段能做出外表接近人類的機器人,走路接近人類的機器人……但這些都屬于很前沿的領域,研究門檻高,實際的商業用途不是很廣,所以大多還停留在樣品階段,走進市場的很少。
2019-10-16 08:27:30
尋求KUKA機器人控制柜三維模型,做方案有時需要用到,大家誰有可以給我發一份嗎?先謝謝了
2016-04-18 16:05:43
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
2023-10-21 20:59:28
及對應的時間, 運動和取抓過程中與其它設備的同步/握手要求, 各個運動軸的有效運動長度及答應的最大運行速度, 機器人工作四周空間上的限制, 使用環境有粉末,高溫,濕度等特殊防護要求。 2.機器人
2017-08-16 11:31:54
給機器人以平衡感的各種方法測量傾角的傳感器 為機器人提供平衡感的最普通方法之一是用一個傾角傳感器或傾角開關。它可以測量機器人與地心之間的相對角度。如果機器人翻倒了,傳感器或開關的角度就改變,這可
2018-10-30 17:10:53
怎樣去設計一種基于PID算法的巡線機器人?基于PID算法的巡線機器人有哪些優勢?
2021-07-27 06:54:05
怎么設計一種室外移動機器人組合導航定位系統?如何實現室外移動機器人組合導航定位系統的硬件設計?如何實現室外移動機器人組合導航定位系統的軟件設計?
2021-04-19 10:50:33
我是新人,求幫助啊,明天需要提交輪式機器人應用的報告,求大神給點建議,可用輪式機器人應用于那些方面,要求實際可行,應用于生活,農業,軍事都可以,謝謝啦
2013-04-17 16:32:16
,使讀者快速掌握DELTA并聯機器人的系統設計方法和編程應用,實現理論和實踐的有機結合。2、工業機器人技術基礎及應用本書以國際工業機器人四大家族ABB、KUKA、YASKAWA和FANUC機器人
2018-10-29 17:03:22
江智黨建機器人是經過多年的市場沉淀 ;現已可以提供系統 全方位的黨建機器人服務
2022-06-21 07:59:59
產品介紹 ABB機器人產品線豐富,包括?多關節機器人、?協作機器人、?噴涂機器人、?SCARA機器人以及?自主移動機器人(?AMR)等?多關節機器人?:ABB的多關節機器人是六軸關節型
2024-09-30 17:56:07
中圖儀器GTS機器人空間姿態激光跟蹤高精度測量儀具有高精度、效率高、實時跟蹤測量、安裝快捷、操作簡便等特點,主要用于百米大尺度空間三維坐標的精密測量。它集激光干涉測距技術、光電檢測技術、精密機械技術
2024-10-25 16:29:53
GTS機器人空間位置精度激光追蹤儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,被廣泛應用在飛機、汽車、船舶、航天、機器人、核電
2024-12-27 14:41:22
機器人激光焊接機:高精度自動化焊接的未來1. 概述機器人激光焊接機是一種集成了工業機器人和激光焊接技術的先進自動化設備,通過高能量密度的激光束實現快速、精準的焊接。該系統結合了機器人的靈活運動
2025-03-28 14:04:12
GTS機器人位置精度激光跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機。它集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,主要用于百米大尺度空間三維坐標
2025-04-14 11:00:17
工件坐標,用一種通俗的說法就是,大家用尺子進行測量的時候,尺子上零刻度的位置作為測量對象的起點。在工業機器人
2010-12-14 21:39:33 23442
23442 KUKA機器人TCP(工具中心點)設定.
2015-12-23 14:50:49 36
36 UKA(庫卡)是工業機器人四大家族品牌之一,也是世界領先的工業機器人制造商,在工業機器人制造方面有40多年的歷史。 早在1973年,KUKA就研發出了旗下第一臺由電機驅動的6軸工業機器人
2017-09-29 17:11:140 萊茵機電的經驗及知識來主要介紹直角坐標機器人和關節機器人的特性,以及兩種機器人的應用對比。這些對比分析來自我們的經驗及認識,有其局限性,不充分,僅供朋友們參考。 一、直角坐標機器人一、直角坐標機器人 概念 基于
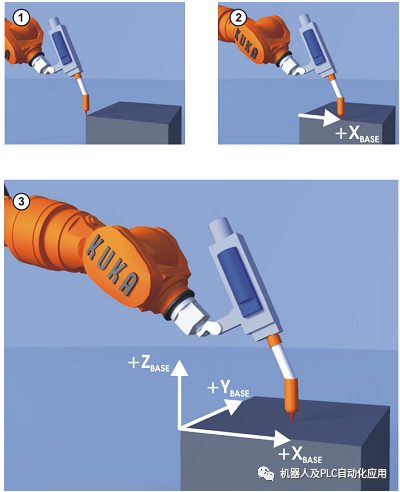
2017-10-09 11:15:570 KUKA機器人工具坐標系的建立執行方法:將待檢測的工具安裝在法蘭上,找出一個合適的參考點 它可以是固定在工作空間的某一參考芯。
2017-10-16 15:15:349 使用LabVIEW和用于DENSO的ImagingLab Robotics庫,機器視覺和機器人系統可以集成在一個應用程序中。本文介紹了使用相同坐標系統在機器視覺系統和機器人系統之間進行標定的方法
2017-11-17 17:03:2514011 針對借助激光跟蹤儀標定機器人所涉及的坐標系統一問題,對基于空間幾何法擬合建立的基坐標系與機器人理論基坐標系的轉換關系進行了研究,提出了一種基于對偶四元數法的機器人基坐標系標定方法。利用指數積公式推導
2018-03-07 10:43:522 任何機器人都離不開基坐標系,也是機器人TCP在三維空間運動空間所必須的基本坐標系(面對機器人前后:X軸 ,左右:Y軸, 上下:Z軸)。
2019-05-14 09:56:5924322 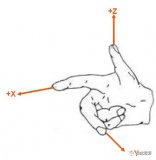
KUKA 和 Tricor 公司最近共同完成了一個項目:一臺靈敏型 KUKA LBR iiwa 機器人,可用于紙箱坯料的折疊和粘接。瓦楞紙板被運送至包裝機器人的工作區域內。
2020-05-09 11:12:484845 大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合:
2020-05-09 15:49:435868 機器人在執行焊道位置示教程序時,當機器人運行到焊道軌跡點時,通過KUKA 用戶程序記錄焊道的程序號,焊點號,焊道圖形屬性和坐標值,然后存到PFO應用軟件數據庫里。
2020-06-30 17:11:522675 坐標機器人又稱單軸機械手,工業機械臂,電缸等,是以XYZ直角坐標系統為基本數學模型,以伺服電機、步進電機為驅動的單軸機械臂為基本工作單元,以滾珠絲桿、同步皮帶為常用的傳動方式所架構起來的機器人系統,可以完成在XYZ三維坐標系中任意一點的到達和遵循可控的運動軌跡。
2020-08-24 09:50:332951 。 WORLD 世界坐標系 在供貨狀態下與?ROBROOT坐標系中一致。 可以從機器人足部 “ 向外移出 ”。 說明世界坐標系在?ROBROOT?坐標系中的位置。 此外,機器人系統為壁裝與吊頂安裝時使用。 BASE 基坐標系 是一個可自由定義、用戶定制的坐標系說明基坐標在世界坐標
2020-12-23 17:41:206666 BASE坐標用來確定機器人空間上的坐標點,而TOOL則用來確定機器人以什么樣的姿態去這個軌跡點。
2021-04-25 17:36:226740 
KUKA庫卡機器人MGV電源模塊維修PH1013-2840MGV電源維修 庫卡電源模塊維修 機器人電源模塊維修 庫卡控制器維修 KUKA電源維修KUKA庫卡機器人電源模塊維修MGV控制器維修
2022-01-12 10:39:4011 KUKA機器人PN系統網絡故障的判斷方法說明。
2022-03-11 10:08:305169 坐標機器人碼垛機
2022-09-30 11:34:181301 直角坐標機器人是指能夠實現自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系的、多用途的操作機。又稱大型的直角坐標機器人,也稱桁架機器人或龍門式機器人,其工作的行為方式主要是通過
2022-11-02 14:59:563641 
KUKA機器人固定焊鉗的銑削控制
2023-04-13 11:36:031453 一般都會定義機器人第一軸的旋轉軸為基坐標系Z軸,旋轉中心即是坐標系原點,X和Y的方向是的電機零點確定,所以只要你不更換電機的零點和機械結構,單個機器人里這個基坐標系是永遠不會變的!
2023-05-11 15:57:442629 
KUKA機器人的PC是就是一個普通的PC,因此調整時間和更改普通PC的實踐一樣.
2023-05-29 11:10:1610205 
直角坐標機器人直角坐標機器人是指能夠實現自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系的、多用途的操作機。又稱大型的直角坐標機器人,也稱桁架機器人或龍門式機器人,其工作的行為方式
2022-10-27 11:19:412522 
大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合。
2023-11-13 11:24:462990 
中的坐標系 機器人中都有哪些坐標系呢? 比如在機械臂形態的機器人中,機器人安裝的位置叫做基坐標系Base Frame,機器人安裝位置在外部環境下的參考系叫做世界坐標系World Frame,機器人末端夾爪的位置叫做工具坐標系,外部被操作物體的位置
2023-11-22 17:20:232850 
電子發燒友網站提供《KUKA機器人編程說明(英文).pdf》資料免費下載
2025-03-07 14:05:010 1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或頻繁啟動
2025-03-08 09:16:201623 電子發燒友網站提供《KUKA機器人使用說明書.pdf》資料免費下載
2025-04-17 14:07:111
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論