 機器人坐標系Launch文件解析
機器人坐標系Launch文件解析

Launch文件解析
先來看下剛才運行的launch文件,里邊啟動了四個節點,分別是:
- 小海龜仿真器
- 海龜1的坐標系廣播
- 海龜2的坐標系廣播
- 海龜跟隨控制
其中,兩個坐標系的廣播復用了turtle_tf_broadcaster節點,通過傳入的參數名修改維護的坐標系名稱。
learning_tf/launch/turtle_following_demo.launch.py
from launch import LaunchDescriptionfrom launch.actions import DeclareLaunchArgumentfrom launch.substitutions import LaunchConfigurationfrom launch_ros.actions import Nodedef generate_launch_description(): return LaunchDescription([ Node( package='turtlesim', executable='turtlesim_node', name='sim' ), Node( package='learning_tf', executable='turtle_tf_broadcaster', name='broadcaster1', parameters=[ {'turtlename': 'turtle1'} ] ), DeclareLaunchArgument( 'target_frame', default_value='turtle1', description='Target frame name.' ), Node( package='learning_tf', executable='turtle_tf_broadcaster', name='broadcaster2', parameters=[ {'turtlename': 'turtle2'} ] ), Node( package='learning_tf', executable='turtle_following', name='listener', parameters=[ {'target_frame': LaunchConfiguration('target_frame')} ] ), ])
坐標系動態廣播
海龜1和海龜2在world坐標系下的坐標變換,在turtle_tf_broadcaster節點中實現,除了海龜坐標系的名字不同之外,針對兩個海龜的功能是一樣的。
learning_tf/turtle_tf_broadcaster.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居(www.guyuehome.com)@說明: ROS2 TF示例-廣播動態的坐標變換"""import rclpy # ROS2 Python接口庫from rclpy.node import Node # ROS2 節點類from geometry_msgs.msg import TransformStamped # 坐標變換消息import tf_transformations # TF坐標變換庫from tf2_ros import TransformBroadcaster # TF坐標變換廣播器from turtlesim.msg import Pose # turtlesim小海龜位置消息class TurtleTFBroadcaster(Node): def __init__(self, name): super().__init__(name) # ROS2節點父類初始化 self.declare_parameter('turtlename', 'turtle') # 創建一個海龜名稱的參數 self.turtlename = self.get_parameter( # 優先使用外部設置的參數值,否則用默認值 'turtlename').get_parameter_value().string_value self.tf_broadcaster = TransformBroadcaster(self) # 創建一個TF坐標變換的廣播對象并初始化 self.subscription = self.create_subscription( # 創建一個訂閱者,訂閱海龜的位置消息 Pose, f'/{self.turtlename}/pose', # 使用參數中獲取到的海龜名稱 self.turtle_pose_callback, 1) def turtle_pose_callback(self, msg): # 創建一個處理海龜位置消息的回調函數,將位置消息轉變成坐標變換 transform = TransformStamped() # 創建一個坐標變換的消息對象 transform.header.stamp = self.get_clock().now().to_msg() # 設置坐標變換消息的時間戳 transform.header.frame_id = 'world' # 設置一個坐標變換的源坐標系 transform.child_frame_id = self.turtlename # 設置一個坐標變換的目標坐標系 transform.transform.translation.x = msg.x # 設置坐標變換中的X、Y、Z向的平移 transform.transform.translation.y = msg.y transform.transform.translation.z = 0.0 q = tf_transformations.quaternion_from_euler(0, 0, msg.theta) # 將歐拉角轉換為四元數(roll, pitch, yaw) transform.transform.rotation.x = q[0] # 設置坐標變換中的X、Y、Z向的旋轉(四元數) transform.transform.rotation.y = q[1] transform.transform.rotation.z = q[2] transform.transform.rotation.w = q[3] # Send the transformation self.tf_broadcaster.sendTransform(transform) # 廣播坐標變換,海龜位置變化后,將及時更新坐標變換信息def main(args=None): rclpy.init(args=args) # ROS2 Python接口初始化 node = TurtleTFBroadcaster("turtle_tf_broadcaster") # 創建ROS2節點對象并進行初始化 rclpy.spin(node) # 循環等待ROS2退出 node.destroy_node() # 銷毀節點對象 rclpy.shutdown() # 關閉ROS2 Python接口
完成代碼的編寫后需要設置功能包的編譯選項,讓系統知道Python程序的入口,打開功能包的setup.py文件,加入如下入口點的配置:
entry_points={ 'console_scripts': [ 'static_tf_broadcaster = learning_tf.static_tf_broadcaster:main', 'turtle_tf_broadcaster = learning_tf.turtle_tf_broadcaster:main', 'tf_listener = learning_tf.tf_listener:main', ], },
海龜跟隨
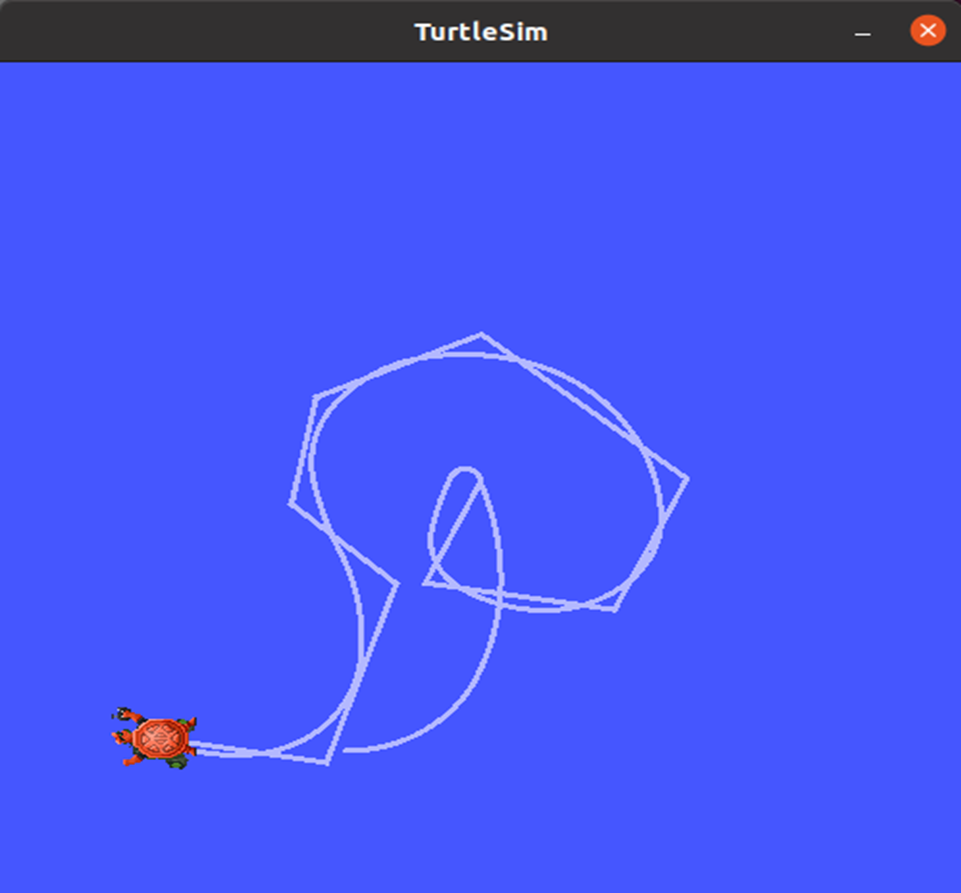
坐標系都正常廣播了,接下來我們就可以訂閱兩只海龜的位置關系,并且變換成速度指令進行控制啦。
learning_tf/turtle_following.py
#!/usr/bin/env python3# -*- coding: utf-8 -*-"""@作者: 古月居(www.guyuehome.com)@說明: ROS2 TF示例-通過坐標變化實現海龜跟隨功能"""import mathimport rclpy # ROS2 Python接口庫from rclpy.node import Node # ROS2 節點類import tf_transformations # TF坐標變換庫from tf2_ros import TransformException # TF左邊變換的異常類from tf2_ros.buffer import Buffer # 存儲坐標變換信息的緩沖類from tf2_ros.transform_listener import TransformListener # 監聽坐標變換的監聽器類from geometry_msgs.msg import Twist # ROS2 速度控制消息from turtlesim.srv import Spawn # 海龜生成的服務接口class TurtleFollowing(Node): def __init__(self, name): super().__init__(name) # ROS2節點父類初始化 self.declare_parameter('source_frame', 'turtle1') # 創建一個源坐標系名的參數 self.source_frame = self.get_parameter( # 優先使用外部設置的參數值,否則用默認值 'source_frame').get_parameter_value().string_value self.tf_buffer = Buffer() # 創建保存坐標變換信息的緩沖區 self.tf_listener = TransformListener(self.tf_buffer, self) # 創建坐標變換的監聽器 self.spawner = self.create_client(Spawn, 'spawn') # 創建一個請求產生海龜的客戶端 self.turtle_spawning_service_ready = False # 是否已經請求海龜生成服務的標志位 self.turtle_spawned = False # 海龜是否產生成功的標志位 self.publisher = self.create_publisher(Twist, 'turtle2/cmd_vel', 1) # 創建跟隨運動海龜的速度話題 self.timer = self.create_timer(1.0, self.on_timer) # 創建一個固定周期的定時器,控制跟隨海龜的運動 def on_timer(self): from_frame_rel = self.source_frame # 源坐標系 to_frame_rel = 'turtle2' # 目標坐標系 if self.turtle_spawning_service_ready: # 如果已經請求海龜生成服務 if self.turtle_spawned: # 如果跟隨海龜已經生成 try: now = rclpy.time.Time() # 獲取ROS系統的當前時間 trans = self.tf_buffer.lookup_transform( # 監聽當前時刻源坐標系到目標坐標系的坐標變換 to_frame_rel, from_frame_rel, now) except TransformException as ex: # 如果坐標變換獲取失敗,進入異常報告 self.get_logger().info( f'Could not transform {to_frame_rel} to {from_frame_rel}: {ex}') return msg = Twist() # 創建速度控制消息 scale_rotation_rate = 1.0 # 根據海龜角度,計算角速度 msg.angular.z = scale_rotation_rate * math.atan2( trans.transform.translation.y, trans.transform.translation.x) scale_forward_speed = 0.5 # 根據海龜距離,計算線速度 msg.linear.x = scale_forward_speed * math.sqrt( trans.transform.translation.x ** 2 + trans.transform.translation.y ** 2) self.publisher.publish(msg) # 發布速度指令,海龜跟隨運動 else: # 如果跟隨海龜沒有生成 if self.result.done(): # 查看海龜是否生成 self.get_logger().info( f'Successfully spawned {self.result.result().name}') self.turtle_spawned = True else: # 依然沒有生成跟隨海龜 self.get_logger().info('Spawn is not finished') else: # 如果沒有請求海龜生成服務 if self.spawner.service_is_ready(): # 如果海龜生成服務器已經準備就緒 request = Spawn.Request() # 創建一個請求的數據 request.name = 'turtle2' # 設置請求數據的內容,包括海龜名、xy位置、姿態 request.x = float(4) request.y = float(2) request.theta = float(0) self.result = self.spawner.call_async(request) # 發送服務請求 self.turtle_spawning_service_ready = True # 設置標志位,表示已經發送請求 else: self.get_logger().info('Service is not ready') # 海龜生成服務器還沒準備就緒的提示def main(args=None): rclpy.init(args=args) # ROS2 Python接口初始化 node = TurtleFollowing("turtle_following") # 創建ROS2節點對象并進行初始化 rclpy.spin(node) # 循環等待ROS2退出 node.destroy_node() # 銷毀節點對象 rclpy.shutdown() # 關閉ROS2 Python接口
完成代碼的編寫后需要設置功能包的編譯選項,讓系統知道Python程序的入口,打開功能包的setup.py文件,加入如下入口點的配置:
entry_points={ 'console_scripts': [ 'static_tf_broadcast
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31310瀏覽量
223344 -
仿真器
+關注
關注
14文章
1052瀏覽量
88127 -
坐標系
+關注
關注
0文章
29瀏覽量
7620 -
ROS
+關注
關注
1文章
296瀏覽量
18846
發布評論請先 登錄
相關推薦
熱點推薦
abb機器人工具坐標系問題
各位大佬請教一下,abb機器人工具坐標系用四點法,六點法,手動輸入等方式標定出的工具坐標系的Z方向與實際工具的長度不符,實際工具長度越長坐標系z方向的差距越大。比如實際工具400mm
發表于 08-07 11:11
介紹坐標系和機器人之間的紐帶即連桿坐標系
介紹坐標系以及它們之間的變換關系,數學的意味還是很濃的。講了那么多的公式和規律,它們要怎么用在機器人上呢?這篇文章將介紹坐標系和機器人之間的紐帶即連桿
發表于 09-01 06:17
機器人基坐標系標定方法研究
針對借助激光跟蹤儀標定機器人所涉及的坐標系統一問題,對基于空間幾何法擬合建立的基坐標系與機器人理論基坐標系的轉換關系進行了研究,提出了一種基
發表于 03-07 10:43
?2次下載
機器人4大坐標系講解
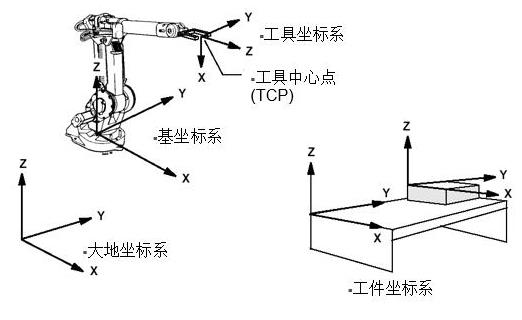
任何機器人都離不開基坐標系,也是機器人TCP在三維空間運動空間所必須的基本坐標系(面對機器人前后:X軸 ,左右:Y軸, 上下:Z軸)。
機器人坐標系用法和算法原理
一般都會定義機器人第一軸的旋轉軸為基坐標系Z軸,旋轉中心即是坐標系原點,X和Y的方向是的電機零點確定,所以只要你不更換電機的零點和機械結構,單個機器人里這個基
發表于 05-11 15:57
?2781次閱讀

機器人坐標系選擇指令和操作步驟
在編程操作過程中,為了確定機器人的空間位置以及姿態的變化,需要建立合適的工具和用戶坐標系。工具坐標系用于確定每個工具中心點(TCP)的位置和工具姿勢。
發表于 05-12 14:43
?3491次閱讀

世界坐標系、相機坐標系、圖像坐標系、像素坐標系之間的關系
相機的成像過程涉及到四個坐標系:世界坐標系、相機坐標系、圖像坐標系、像素坐標系。這篇博客介紹相機的成像過程,以及四個

焊接機器人坐標系有哪幾種
??焊接機器人是一種自動化設備,用于進行焊接操作。為了確保焊接過程的準確性和效率,焊接機器人需要在三維空間中進行定位和控制。這涉及到使用不同的坐標系,以便機器人能夠精確地執行任務。本文


機器人中都有哪些坐標系
坐標系是我們非常熟悉的一個概念,也是機器人學中的重要基礎,在一個完整的機器人系統中,會存在很多坐標系,這些坐標系之間的位置關系該如何管理?

機器人坐標系管理TF跟隨功能解析
.py** ros2 run turtlesim turtle_teleop_key 看到的效果和ROS自帶的例程相同。 原理解析 在兩只海龜的仿真器中,我們可以定義三個坐標系,比如仿真器的全局參考系叫做



 工商網監
工商網監
評論