在過程控制中,按偏差的比例(P)、積分(I)和微分(D)進行控制的PID控制器是應用最為廣泛的一種自動控制器。它具有原理簡單,易于實現,適用面廣,控制參數相互獨立,參數的選定比較簡單等優點;而且在理
2018-03-16 13:56:59 29005
29005 
????在電機控制中,我們給電機輸出的是一個PWM占空比的數值。 ????話不多說,直接上位置式PID基本公式: ????控制流程圖如下: ????上圖中的目標位置一般我們可以通過按鍵或者開關等方式編程實現改變目標值,測量位置就是通過 stm32 去采集編碼器的數
2023-08-23 09:31:145592 
51單片機用三個開關控制三個直流電機要做到現先啟動先停止
2023-10-26 06:09:49
PID控制中有P、I、D三個參數,只有明白這三個參數的含義和作用才能完成控制器PID參數整定,讓控制器到達最佳控制效果。昌暉儀表在本文給大家介紹PID控制中P、I、D參數的作用。
比例作用
比例
2023-06-20 06:50:53
前言如何學習PID控制,最開始需要先拋開各種軟硬件,單純從數學上進行分析,弄懂底層的控制原理是什么?理解清楚后,無非把數學公式變成代碼。剩下就是不斷的實踐,來確定三個參數,使控制結果更加準確。開始介紹
2022-01-14 09:27:14
PD 微分控制PID基本公式1. PID簡介目前工業自動化水平已成為衡量各行各業現代化水平的一個重要標志。同時,控制理論的發展也經歷了古典控制理論、現代控制理論 和 智能控制理論三個階段。智能控制的典型實例是模糊全自動洗衣機等。自動控制系統可分為開環控制系統和閉環控制系統。一個
2021-07-01 10:01:17
PID的比例,積分,微分三個參數怎么確定呢?
2016-04-29 16:02:43
PID調節是自動控制領域的經典算法。主要有三個參數,即P:比例系數。I:積分系數。D:微分系數。在PID調節過程中我們需要知道兩個值:1、系統當前狀態值(即反饋),即電機轉速的實際值。2、期望值。即
2021-09-07 06:38:00
比例環節先提高系統上升到穩態的時間。3.增加一個積分環節徹底消除穩態誤差。4.增加一個微分環節徹底消除超調量。5.綜合調整PID參數得到一個理想的輸出結果。并不是每個系統都需要PID我覺得,有時候PI能
2016-01-29 16:50:21
pidf是pid的改進,有誰對這個比較了解嗎?關于他的參數調整,其代碼有人會寫嗎?
2018-12-22 11:02:45
Simulink中的PID控制器調整
2018-07-31 14:20:25
如何將labview中的模糊控制器和pid結合在一起,利用模糊化后自動調整pid的三個參數Kp、KI、Kd,做簡單的仿真模擬呢?希望有簡單的例子可以用來探討。labview自帶的例子只有單獨的一個模塊的運用,并沒有將兩者聯合在一起的實例vi,會的人也可以可以私聊我或者直接回復,另有答謝啊!!
2020-03-26 08:54:34
本帖最后由 夜魄Y 于 2020-3-24 07:40 編輯
如何將labview中的模糊控制器和pid結合在一起,利用模糊化后自動調整pid的三個參數Kp、KI、Kd,做簡單的仿真模擬呢?希望有簡單的例子可以用來探討。懂得人也可以可以私聊我或者直接回復,另有答謝啊!!!
2020-03-21 15:05:05
本帖最后由 夜魄Y 于 2020-3-24 07:41 編輯
如何將labview中的模糊控制器和pid結合在一起,利用模糊化后自動調整pid的三個參數Kp、KI、Kd,希望有簡單的例子可以用來探討。懂得人也可以互相討論哦。
2020-03-17 08:41:43
如何將labview中的模糊控制器和pid結合在一起,利用模糊化后自動調整pid的三個參數Kp、KI、Kd,希望有簡單的例子可以用來探討。懂得人也可以互相討論哦。
2020-03-19 10:34:29
PID控制器中輸入P,I和D的值,取決于像P,PI或PID這樣的控制器,如下所示。 PID控制器結構 PID控制器由三部分組成,即比例,積分和微分控制。這三個控制器的組合操作為過程控制提供了控制
2020-09-01 17:58:40
文章目錄是什么是PID參數調整增量式PID是什么是PIDP:比例proportionalI:積分integralD:微分derivative參數調整Kp:比例系數:讓偏差(目標減去當前)與調節裝置
2022-01-20 06:44:16
什么是PID控制算法?PID控制算法C語言是如何實現的?特殊情況下的控制算法該如何去調整?比例、積分、微分三個環節的控制作用分別是什么?
2021-06-29 09:24:32
。當采用PID控制器還達不到工藝要求,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。5、公式:數值pid的計算:6、問題。Kp,ti,Td三個參數的設定是PID控制算法的關鍵問題
2019-05-30 08:30:00
【平衡小車】【串級PID參數整定】【詳細版】根據現象手動調整平衡小車的PID簡介:二輪平衡小車的控制分為平衡環(又稱為直立環,保持穩定角度)、速度環(用來保持穩定時速度為零)以及轉向環(用來無轉向
2022-01-05 06:38:32
調節法的優缺點(好像這種方法只能給一個調節的大概位置,具體參數值還得繼續做實驗調出來)4、頻率響應法設計PID參數的優缺點?5、以及還存在哪些高效實用的PID參數調節方法?熱忱歡迎懂PID控制的知友討論。上述問題如若表述有誤,還請指出來修正。補充:暫且定一個標準:最大過調量小于10%,調整時間0.5秒以內!
2018-07-30 10:29:20
變量來求得,求出的輸出值也就是PID參數KP,KI , KD的調整量,模糊控制表就是由這些調整量與輸入量在一個表中按一定關系列出而得到的。由于KP, KI , KD這三個參數調整時是相互獨立的,所以會
2016-02-01 10:25:56
請問Kp、Ki、Kd這三個常量的一般取值是多少?每個參數會對調整過程產生什么影響,取值過大或過小會怎么樣?
2016-09-16 22:05:47
=sptr->LastError;sptr->LastError=Error; return Inc;在將KIKD 取0 的情況下 取了三個不同大小的KP效果如下:KP=0.1,KI=0
2019-07-17 02:49:16
這里面右面這個三個參數怎么設置
2019-07-17 05:35:06
( NETIF_FLAG_BROADCAST)是允許網卡廣播,第二個參數(NETIF_FLAG_ETHARP)是允許使用ARP,那第三個參數(NETIF_FLAG_LINK_UP)是什么意思???
2019-07-19 04:35:49
四軸的串級pid調試,在調內環的時候,外環pid的三個參數是怎么設置?遙控器給的控制是給在外環上,那我現在要調節內環的參數,是應把外環pid的三個參數設置為0,還是什么?麻煩解答下,謝謝。
2019-08-06 03:56:06
控制器還達不到工藝要求,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。Kp,Ti,Td 三個參數的設定是 PID 控制算法的關鍵問題。一般說來編程時只能設定他們的大概數值,并在系統運行時
2020-02-23 07:00:00
PID控制器參數的優化整定一直是自動控制領域的研究熱點。提出一種利用改進思維進化計算(MEC)優化PID控制器參數的方法,在原有算法的框架上,加入自調整操作,依據進化方向
2009-03-15 02:39:51 31
31 該文提出調整系統控制量的模糊 PID 控制器的計算機設計與仿真。以堿回收爐的水位控制為例具體論述調整系統控制量的模糊PID 控制器的設計、2-D 控制表的建立、以及控制器計算
2009-06-09 16:41:5220 本文針對用普通PID控制對VAV系統控制參數難以整定的問題,設計了一種基于模糊控制原理的PID參數在線自調整控制器,根據偏差和偏差變化率來實時調整p K , i K , d K 參數。通過
2009-08-07 09:50:1315 PID 控制器的穩定范圍參數值:在工業控制上,大部分的控制器都是使用PID 控制器,而適當的調整PID 控制器參數遂便成極具挑戰的工作,但是有哪些范圍的PID數值可以使受控場(Plant)穩
2009-10-31 14:31:4945 針對網絡控制系統中網絡時延補償的問題,提出了一種模糊自適應PID控制器的設計方法,通過利用在線時延估計方法對時延進行預估計,根據估計時延值在線調節PID三個參數,從而改善系
2010-07-13 16:05:218 PID控制是什么意思
目前工業自動化水平已成為衡量各行各業現代化水平的一個重要標志。同時,控制理論的發展也經歷了古典控制理論、現代控制理論和智能控制理論三個
2009-04-10 12:40:5347422 在過程控制中,按偏差的比例(P)、積分(I)和微分(D)進行控制的PID控制器(亦稱PID調節器)是應用最為廣泛的一種自動控制器。
2012-01-13 17:14:0983 PID由于用途廣泛、使用靈活,已有系列化產品,使用中只需設定三個參數(Kp, Ti和Td)即可。在很多情況下,并不一定需要全部三個單元,可以取其中的一到兩個單元,但比例控制單元是
2012-01-16 10:59:26164 數字PID控制算法是將模擬PID離散化得到,各參數有著明顯的物理意義,調整方便,所以PID控制器很受工程技術人員的喜愛。
2012-01-16 16:27:45903 網上找的PID的控制原理及手動調諧PID參數,我覺得寫得不錯,可以參考
2016-06-14 14:13:2621 PID控制最通俗的解釋與PID參數的整定方法
2017-01-04 14:47:1544 增量式PID控制,數字PID控制算法的一種基本形式,是通過對控制量的增量(本次控制量和上次控制量的差值)進行PID控制的一種控制算法。
2018-02-26 14:57:3258339 PID是比例、積分、微分的簡稱,PID控制的難點不是編程,而是控制器的參數整定。參數整定的關鍵是正確地理解各參數的物理意義,PID控制的原理可以用人對爐溫的手動控制來理解。閱讀本文不需要高深的數學知識。
2018-05-31 08:40:4447 PID是一個閉環控制算法。因此要實現PID算法,必須在硬件上具有閉環控制,就是得有反饋。比如控制一個電機的轉速,就得有一個測量轉速的傳感器,并將結果反饋到控制路線上,下面也將以轉速控制為例。
2018-08-29 14:16:0118541 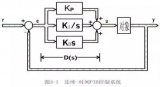
PID是一個閉環控制算法。因此要實現PID算法,必須在硬件上具有閉環控制,就是得有反饋。比如控制一個電機的轉速,就得有一個測量轉速的傳感器,并將結果反饋到控制路線上,下面也將以轉速控制為例。
2018-11-20 11:19:4622975 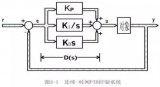
PID是一個閉環控制算法。因此要實現PID算法,必須在硬件上具有閉環控制,就是得有反饋。比如控制一個電機的轉速,就得有一個測量轉速的傳感器,并將結果反饋到控制路線上,下面也將以轉速控制為例。
2019-06-04 17:12:5211507 
PID控制中有P、I、D三個參數,只有明白這三個參數的含義和作用才能完成控制器PID參數整定,讓控制器到達最佳控制效果。能熟練進行PID參數整定,將自動控制系統投自動,這代表著工程技術人員的自動化技能水平,但很多人并未真正掌握PID控制和PID參數整定。
2019-07-18 16:10:3235115 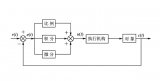
PID三個字母是比例,積分,微分的英文首字母縮寫。可見這三個功能在系統中都起作用,只是負責的功能不同。
2019-10-15 17:29:0043826 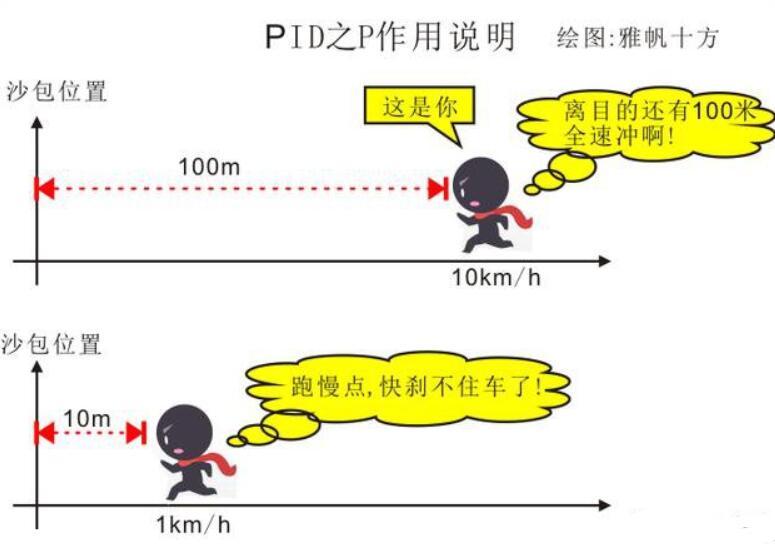
pid利用PI控制和PD控制的優點組合成的控制。PID運算是P、I和D三個運算的總和。
2019-11-29 15:04:2913903 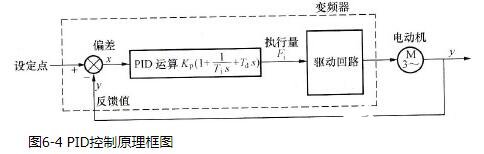
深入研究了PID控制理論,運用了多種方法設計了PID控制器。內容包括兩個部分,其中第一部分為前四章,主要是關于單變量PID控制器的參數整定研究。
2019-12-04 08:00:0028 PID控制器除了上述Ke、Ti、Td三個參數外,還有采樣周期Ts,其作用如下:
2020-07-21 10:15:1415818 
PID控制中有P、I、D三個參數,只有明白這三個參數的含義和作用才能完成控制器PID參數整定,讓控制器到達最佳控制效果。能熟練進行PID參數整定,將自動控制系統投自動,這代表著工程技術人員的自動化技能水平,但很多人并未真正掌握PID控制和PID參數整定。
2020-08-31 09:34:526204 
在自動控制中,PID(Proportion-Integrationi-Differentiation:比例-積分-微分)控制算法在近一個多世紀以來在空城控制領域中占據了主導地位。它是由蘇聯工程師
2020-11-04 11:58:274736 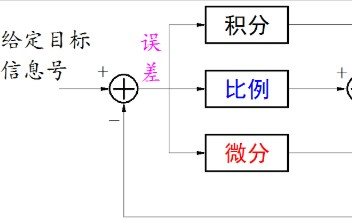
? PID控制中有P、I、D三個參數,只有明白這三個參數的含義和作用才能完成控制器PID參數整定,讓控制器到達最佳控制效果。能熟練進行PID參數整定,將自動控制系統投自動,這代表著工程技術人員
2020-12-25 17:24:0817609 PID 控制器結構清晰,參數可調,適用于各種控制對象, PID 控制器的核心思想是針對控制對象的控制需求,建立描述對象動態特性的數學模型,通過PID 參數整定實現在比例, 微分,積分三個方面參數調整的控制策略來達到最佳系統響應和控制效果,式子如下:
2021-03-12 17:40:4628 第一個重要參數是涓流階段的低恒壓值,第二個重要參數是第二階段的高恒壓值,第三個重要參數是轉換電流。這三個重要參數與電池數目有關,與電池的容量Ah有關,與溫度有關,與電池種類有關。
2021-04-09 08:57:482283 電子發燒友網為你提供要讓PID控制到達最佳效果,要先明白P、I、D這三個參數的含義和作用資料下載的電子資料下載,更有其他相關的電路圖、源代碼、課件教程、中文資料、英文資料、參考設計、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-21 08:40:597 PID控制中有P、I、D三個參數,只有明白這三個參數的含義和作用才能完成控制器PID參數整定,讓控制器到達最佳控制效果。
2021-05-27 15:38:4095 作為經典的控制理論,PID控制規律仍然是當今工控行業的主導控制方式,無論復雜、簡單的控制任務,PID控制都能取得滿意的控制效果,前提是PID參數必須選擇合適。可以說,通過適當的PID參數,PID控制
2021-06-01 10:28:0170 PID因穩定性極好現被廣泛應用于工業過程控制領域。PID能改善系統在調節過程中的動態特性以及可以避免被控量的嚴重超調,具有抑制誤差的作用,在一定的控制度下通過公式計算得到PID控制器的參數,在實際運行中進行最后調整與完善。
2021-10-11 10:19:4119920 PID控制中有P、I、D三個參數,只有明白這三個參數的含義和作用才能完成控制器PID參數整定,讓控制器到達最佳控制效果。能熟練進行PID參數整定,將自動控制系統投自動,這代表著工程技術人員的自動化技能水平,但很多人并未真正掌握PID控制和PID參數整定。
2022-09-27 15:27:226248 PID控制器(比例-積分-微分控制器),由比例單元(Proportional)、積分單元(Integral)和微分單元(Derivative)構成,可以通過調整這三個單元的增益來調整其特性,如下圖所示。PID控制器主要適用于基本上線性且動態特性不隨時間變化的系統。
2022-11-03 11:43:511892 本文將詳細介紹如何通過關注特定傳感器參數來優化實時控制系統的數據捕獲提供了三個技巧。
2022-12-22 14:20:171402 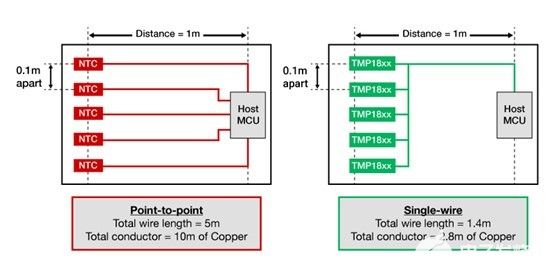
隨著半導體工藝的發展,由導線引起的寄生效應產生的影響越來越大。三個寄生參數(電容、電阻和電感)對電路都有影響。
2023-02-13 10:38:029820 
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。
2023-02-14 15:06:2935150 PID控制規律及特點 PID控制器中的比例、積分、微分作用是通過比例系數K,、積分時DAC7624U間ri和微分時間Td這三個參數來實現的。所以,只要這三個參數選擇的合適,就可以獲得良好的控制質量
2023-03-09 14:12:088181 PID調節器是一種常見的控制系統,它可以通過對輸入信號進行處理,控制輸出信號來維持目標參數的穩定性。PID調節器的三個重要參數如下:
比例系數(P):比例系數是PID調節器中最基本的參數
2023-03-25 11:37:2725312 、流量計等。
調整參數:根據實際控制效果和要求,調整PID控制器的三個參數,即比例系數、積分時間和微分時間。
啟動控制器:啟動PID控制器,并觀察控制器輸出量的變化和控制效果。
2023-03-25 11:41:2221474 過程控制中有兩個重要的算法PID反饋算法,卡爾曼狀態估計算法。PID主要用來過程控制,卡爾曼濾波主要用來狀態估計,比如預測運動軌跡之類的。
2023-06-29 10:41:274033 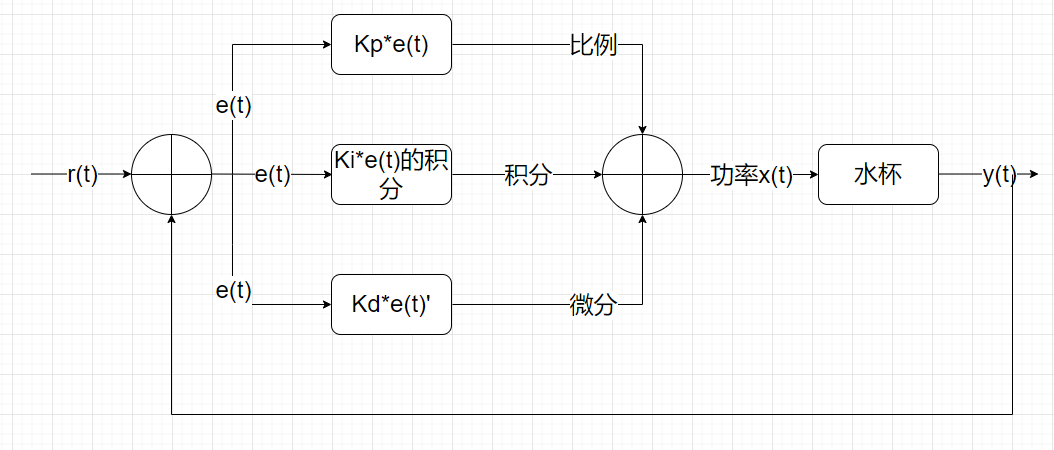
PSO(粒子群算法)在處理連續問題上有著較強的能力,因此很適合用來做參數優化,而PID控制器由三個參數組成,它們分別是:Kp 、Ki 、Kd 。
2023-07-20 14:20:426618 
力保持試驗。 而要成功進行力保持試驗,正確調整PID(比例-積分-微分)參數是至關重要的。本文科準測控小編將為您介紹如何在橡膠拉力測試機上正確調整PID參數,以解決這一問題。 一、PID控制的基本原理 在開始調整PID參數之前,首
2023-10-09 09:51:251356 
在Python中,range()是一個內置函數,用于生成一個整數序列。range()的三個參數分別代表起始值、終止值和步長。下面將詳盡、詳實和細致地解釋這三個參數的含義。 起始值(start):指定
2023-11-21 14:47:4212827 PID調節是一種廣泛用于工業控制系統中的反饋回路控制方法。通過調整比例(P)、積分(I)和微分(D)三個參數,可以有效地控制系統誤差,提高系統的穩定性和響應速度。下面將詳細介紹PID調節參數
2023-11-24 14:14:5556033 在計算機科學中,PID(進程標識符)是一個用于唯一標識運行中的進程的整數值。PID主要具有以下三個參數作用: 進程創建:PID參數用于在操作系統中創建新的進程。當操作系統啟動一個進程時,會為其分配一
2024-01-16 14:56:3414053 參數對系統的影響。 一、PID控制原理 PID控制的基本原理是根據反饋信號來調整輸出控制量,使得系統的實際輸出與期望輸出盡可能接近。 PID控制器的基本結構由三個分別對應于比例(Proportional
2024-01-22 15:35:009810 PID控制器非常實用且有效。它們基于簡單的數學原理,通過調整三個參數(比例系數P、積分系數I和微分系數D)來對系統的偏差進行控制。這種簡單性使得PID控制器易于理解和實現,同時也能夠提供穩定且可靠的控制效果。
2024-04-12 11:06:282722 
器的核心在于通過調整比例(P)、積分(I)和微分(D)三個參數,實現對被控對象的精確控制。本文將詳細探討PID控制器中P、I、D的含義、作用及其在控制系統中的應用。
2024-06-05 15:30:4311740 在工業控制領域,PID(比例-積分-微分)控制算法以其簡單實用、魯棒性好、應用范圍廣等特點,成為了工程師們實現穩定、高效控制的首選方案。PID控制算法通過調整比例、積分和微分三個參數,對系統的偏差
2024-06-11 14:47:153404 比例(P)、積分(I)和微分(D)三個參數的調節,實現對系統輸出的精確控制。 一、PID控制器的基本原理 比例控制(P控制) 比例控制是PID控制器中最基本的控制方式。其核心思想是通過比較系統的輸出值
2024-06-30 10:41:442573 (Proportional)、積分(Integral)和微分(Derivative),這三個參數分別對應控制器的三種基本控制作用。 在PID控制器中,D代表微分(Derivative)控制,它是一種預測控制手段,用于預測系統的未來行為并進行相應的調整。微分控制的作用是快速響
2024-09-12 14:48:163110 單元(I)和微分單元(D)三個基本部分組成,通過調整這三個部分的參數(Kp、Ki、Kd)來實現對被控對象的精確控制。 PID控制器的原理 PID控制器的核心思想是根據系統當前的狀態(即偏差)和過去的狀態(即偏差的積分和微分),預測未來的狀態,并據此調整控制量,使系統輸出能夠快速、準確地跟蹤設
2024-11-06 10:27:124544 ),這三個參數共同作用于控制器,以實現對系統輸出的精確控制。 一、PID控制器的組成 PID控制器由三個基本部分組成:比例項(P)、積分項(I)和微分項(D)。 比例項(P) :比例項是控制器輸出與偏差(期望值與實際值之間的差)的直接比例。比例增益(Kp)越大,控制器對偏差的反應越
2024-11-06 10:28:442714 PID控制,即比例-積分-微分控制,是一種廣泛應用于工業控制系統中的控制算法。它通過比例(P)、積分(I)和微分(D)三個參數的調整來實現對系統輸出的精確控制。 PID控制的優點 簡單易行 :PID
2024-11-06 10:33:106681 現代復雜系統的控制需求。 PID控制簡介 PID控制是一種反饋控制算法,它通過調整系統的輸入,以減少輸出與期望值之間的偏差。PID控制器由三個主要部分組成:比例(P)、積分(I)和微分(D)控制器。比例控制器根據當前偏差的大小調整
2024-11-06 10:34:242443 PID調節器是一種廣泛應用于工業控制系統中的控制器,它根據給定的參考值(設定值)和實際測量值(過程變量)之間的偏差來調整控制信號,以達到控制目標。PID調節器的名稱來源于其三個基本控制動作:比例
2024-11-06 10:38:392700 ,從而提高焊接質量。 2. PID控制技術原理 PID控制技術由比例(P)、積分(I)和微分(D)三個基本環節組成。比例環節根據偏差的大小進行控制,積分環節消除穩態誤差,微分環節預測偏差趨勢,提前進行調整。PID控制器可以根據系統的實際響
2024-11-06 10:40:111574 在現代工業自動化控制系統中,PID控制器因其簡單、高效而被廣泛使用。PID控制器的三個參數——比例(P)、積分(I)和微分(D)——共同決定了系統的動態響應和穩定性。 PID控制器原理簡述 PID
2024-11-13 14:31:3313822 在工業自動化領域,PID控制器因其簡單、高效和廣泛應用而備受青睞。PID代表比例(Proportional)、積分(Integral)和微分(Derivative)三個控制作用,它們共同作用于系統
2024-11-13 14:34:521877 PID控制器的名稱來源于其三個核心控制參數:比例(Proportional)、積分(Integral)和微分(Derivative)。這三個參數共同作用于控制器的輸出,以減少系統輸出與設定值(參考值)之間的偏差。 比例(P)控制 :比例控制是PID控制的基礎,它根據當前
2024-11-14 09:07:092436 PID控制(比例-積分-微分控制)是一種常見的反饋控制算法,廣泛應用于工業控制系統中。在Python中實現PID控制,我們可以遵循以下步驟: 1. 理解PID控制原理 PID控制器有三個主要參數
2024-11-14 09:09:452182 的基礎原理 伺服系統的參數調整本質是通過PID控制算法實現對機械系統的精確匹配。位置環、速度環、電流環的三環結構構成伺服控制的基礎框架,其中位置環作為最外環決定最終定位精度,速度環影響動態響應特性,電流環則直接控
2025-10-13 07:41:34854 
應用三個維度展開分析。 一、PID控制的基本原理與變頻器實現 PID(比例-積分-微分)控制是一種通過誤差反饋實現系統調節的經典算法。在變頻器中,PID控制通過以下方式作用于電機: 1. 比例環節(P):實時響應偏差信號,偏差越大,輸出
2025-12-06 07:39:461513
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論