 如何調節PID參數 PID控制器的調試方法
如何調節PID參數 PID控制器的調試方法

在現代工業自動化控制系統中,PID控制器因其簡單、高效而被廣泛使用。PID控制器的三個參數——比例(P)、積分(I)和微分(D)——共同決定了系統的動態響應和穩定性。
PID控制器原理簡述
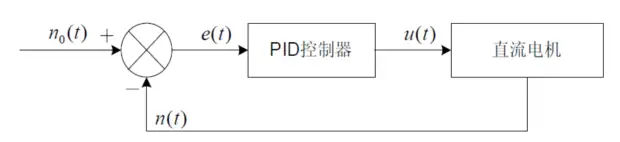
PID控制器通過計算誤差信號(期望值與實際值之差)的比例、積分和微分來調整控制量,以減少誤差并實現系統的穩定。比例項(P)對當前誤差進行響應,積分項(I)對過去累積的誤差進行響應,而微分項(D)則預測未來誤差的變化。
調節PID參數的基本步驟
- 比例(P)參數調節 :
- 首先,將積分(I)和微分(D)參數設置為0,只保留比例項。
- 逐漸增加P值,直到系統出現振蕩,記錄此時的P值。
- 將P值設置為振蕩時P值的60%左右,以避免過大的超調。
- 積分(I)參數調節 :
- 在P參數調定后,逐漸增加I值,觀察系統響應。
- I參數的增加會減少穩態誤差,但過大的I值可能導致系統響應變慢或不穩定。
- 微分(D)參數調節 :
- 在P和I參數調定后,增加D值可以減少系統的超調和振蕩。
- D參數對系統的動態性能有顯著影響,但過大的D值可能導致噪聲放大。
PID控制器的調試方法
- 開環測試 :
- 在沒有反饋的情況下,對系統進行開環測試,以了解系統的基本動態特性。
- 閉環測試 :
- 在閉環條件下,逐步調整PID參數,觀察系統響應,并記錄不同參數下的性能。
- 臨界比例增益法 (Ziegler-Nichols方法):
- 通過逐步增加P參數,直到系統開始振蕩,記錄此時的增益值,然后根據Ziegler-Nichols公式計算I和D參數。
- 衰減曲線法 :
- 通過觀察系統在不同P參數下的衰減曲線,確定系統的臨界增益和時間常數,進而計算PID參數。
- 模擬退火法 :
- 利用模擬退火算法在參數空間中搜索最優的PID參數組合。
- 遺傳算法 :
- 通過模擬自然選擇和遺傳機制,優化PID參數。
調試過程中的注意事項
- 系統穩定性 :
- 在調節參數時,始終確保系統的穩定性,避免因參數設置不當導致系統失控。
- 參數的相互作用 :
- 認識到P、I、D參數之間存在相互作用,一個參數的調整可能會影響到其他參數的效果。
- 系統響應的非線性 :
- 考慮到實際系統可能存在非線性特性,PID參數的調節需要根據實際情況進行調整。
- 環境干擾 :
- 在調試過程中,考慮到環境因素和外部干擾對系統性能的影響。
- 參數的微調 :
- 在初步調節后,進行微調以優化系統性能,達到更精細的控制效果。
結論
PID控制器的參數調節是一個復雜且需要細致操作的過程。通過理解PID控制器的工作原理,掌握基本的調節步驟和調試方法,工程師可以有效地調節PID參數,實現對系統的精確控制。在實際應用中,可能需要結合多種方法和多次迭代來找到最佳的PID參數設置。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
114文章
17787瀏覽量
193082 -
PID
+關注
關注
38文章
1499瀏覽量
91159 -
參數
+關注
關注
11文章
1869瀏覽量
33943 -
工業自動化
+關注
關注
17文章
3125瀏覽量
69880
發布評論請先 登錄
相關推薦
熱點推薦

變頻器PID參數設置步驟
變頻器PID控制是工業自動化領域中實現精確調節的關鍵技術之一,其核心在于通過比例(P)、積分(I)、微分(D)三個參數的協同作用,實現對電機

變頻器pid怎么啟用
變頻器PID調試是工業自動化控制中的關鍵環節,其核心在于通過比例(P)、積分(I)、微分(D)三個參數的動態調整,實現被控量(如壓力、溫度、

PID控制的算法
的偏差有關,這樣就大大提高了系統的穩定性。需要注意的是最終的輸出結果應該為
u(K)+增量調節值;
PID的離散化過程基本思路就是這樣, 從而實現微控制器的控制作用。
發表于 01-23 08:18
PID調參實用方法
方法,最終所展示出來的溫度曲線是極其不穩定的,他會由于控制器件的靈敏程度、加熱頭的性能等等原因,導致最終的溫度曲線會在目標周圍震蕩,達不到理想的控制效果,就像下圖:實際曲線(黑線) 在 目標曲線(紅線
發表于 11-28 07:17
Aerodiode高帶寬激光鎖定PID控制器
。 PID-C型激光鎖定PID控制器專為實現寬達30MHz控制帶寬內的最低噪聲水平而設計。該設備采用觸屏控制(無需電腦)的模塊化設計,集成了

一步到位,Moku數字PID控制器實現系統實時調節與驗證
PID控制被廣泛應用于實驗控制和工業自動化系統中,但在實際調試中,傳統的PID控制器往往需要大量

改進的BP網絡PID控制器在無刷直流電機中的應用
通過分析學習速率對BP算法的影響,提出一種分層調整學習速率的改進BP 網絡算法,并把該方法設計成 PID控制器應用在無刷直流電機控制系統中,仿真結果驗證了基于改進的 BP 網絡的
發表于 05-28 15:42
激光 PID 控制器的工作原理與優勢
在激光技術廣泛應用的今天,激光設備的性能優劣直接影響著眾多領域的生產與科研成果。而激光 PID控制器,憑借其卓越的調控能力,成為激光設備的 “智能核心調控器”。



 工商網監
工商網監
評論