 如何選擇合適的PID控制器
如何選擇合適的PID控制器

在工業自動化領域,PID控制器因其簡單、高效和廣泛應用而備受青睞。PID代表比例(Proportional)、積分(Integral)和微分(Derivative)三個控制作用,它們共同作用于系統,以實現精確的過程控制。選擇合適的PID控制器不僅能夠提高系統的穩定性和響應速度,還能減少能耗和提高生產效率。
1. 理解PID控制器的基本原理
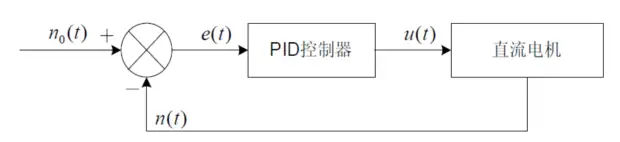
PID控制器通過調整控制量來減少誤差,即實際值與設定值之間的差異。比例作用(P)直接響應當前誤差,積分作用(I)累積過去的誤差以消除穩態誤差,而微分作用(D)預測未來的誤差以提高系統的動態響應。
2. 分析被控對象的特性
在選擇PID控制器之前,必須對被控對象的特性有深入的了解。這包括系統的動態特性、時間常數、滯后和非線性特性等。這些特性將直接影響PID參數的設置和控制器的性能。
3. 選擇合適的控制器類型
根據被控對象的特性,可以選擇不同類型的PID控制器:
- 標準PID控制器 :適用于大多數線性系統。
- 串級PID控制器 :適用于具有較大時間滯后的系統,通過兩個PID控制器串聯來提高控制精度。
- 并行PID控制器 :適用于需要同時控制多個過程變量的系統。
- 自適應PID控制器 :適用于參數隨時間變化的系統,控制器能夠自動調整參數以適應系統的變化。
4. 參數整定
PID控制器的性能很大程度上取決于參數的整定。參數整定包括比例增益(Kp)、積分時間(Ti)和微分時間(Td)的設定。以下是一些常見的整定方法:
- 試錯法 :通過手動調整參數,觀察系統響應,逐步找到最佳參數。
- Ziegler-Nichols方法 :一種經驗方法,通過特定的測試步驟來確定PID參數。
- Cohen-Coon方法 :另一種經驗方法,適用于具有較大滯后的系統。
- 模型預測控制(MPC) :基于系統模型來預測未來的誤差,并計算最優控制動作。
5. 考慮控制器的實現方式
PID控制器可以以不同的方式實現,包括:
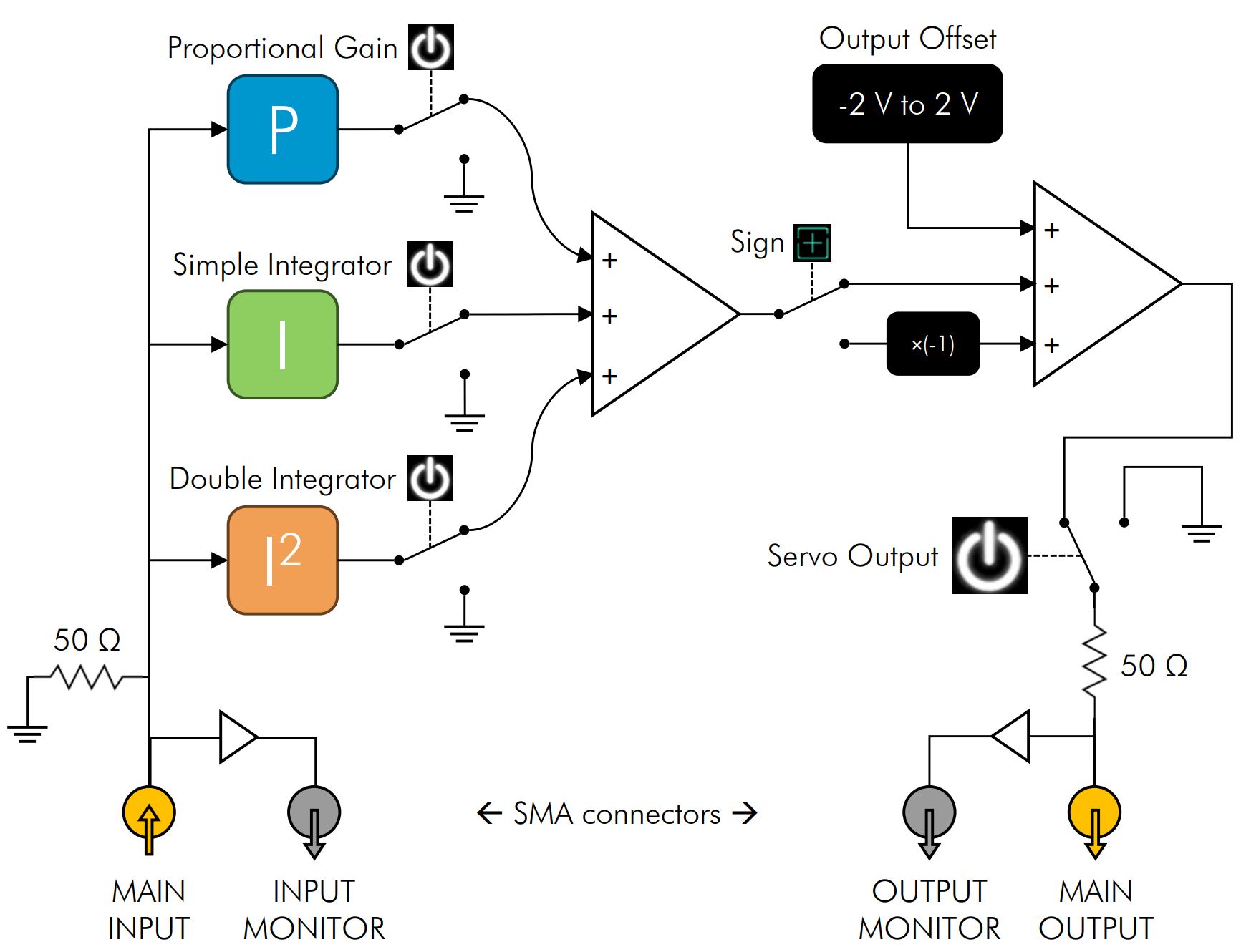
- 模擬控制器 :使用模擬電路實現PID控制,適用于簡單的系統。
- 數字控制器 :使用微處理器或PLC實現PID控制,具有更高的靈活性和精度。
- 軟件控制器 :在計算機軟件中實現PID控制,適用于復雜的控制系統。
6. 考慮系統的干擾和噪聲
在實際應用中,系統往往會受到外部干擾和噪聲的影響。選擇合適的PID控制器需要考慮這些因素,以確保控制器能夠在干擾和噪聲存在的情況下保持穩定。
7. 考慮控制器的魯棒性
魯棒性是指控制器在面對系統參數變化和不確定性時保持性能的能力。選擇具有高魯棒性的PID控制器可以提高系統的可靠性和穩定性。
8. 進行仿真和測試
在實際應用PID控制器之前,進行仿真和測試是必要的。這可以幫助預測控制器在實際運行中的表現,并在實施前發現潛在的問題。
9. 考慮成本和維護
選擇合適的PID控制器還需要考慮成本和維護因素。高性能的控制器可能成本較高,但長期來看,它們可以提高效率和減少維護成本。
10. 持續優化
即使PID控制器已經投入使用,也需要持續監控和優化。隨著系統條件的變化,PID參數可能需要調整以保持最佳性能。
-
參數
+關注
關注
11文章
1870瀏覽量
33999 -
PID控制器
+關注
關注
2文章
173瀏覽量
19750 -
工業自動化
+關注
關注
17文章
3197瀏覽量
70019
發布評論請先 登錄
探索DS1673便攜式系統控制器:低功耗便攜產品的理想選擇
PID控制的算法
C語言增量式PID的通用算法
請問如何優化PID控制器的參數以實現快速響應和減少超調?
怎樣理解變頻器內置PID控制參數的含義
選擇微控制器MCU幾個步驟
Aerodiode高帶寬激光鎖定PID控制器
CW32電機控制基礎——PID控制原理
一步到位,Moku數字PID控制器實現系統實時調節與驗證

改進粒子群算法的永磁同步電機PID控制器
改進的BP網絡PID控制器在無刷直流電機中的應用


如何選擇適合您的過程控制器?




 工商網監
工商網監
評論