總結萬能的PID算法: PID的數學模型 在工業應用中PID及其衍生算法是應用最廣泛的算法之一,是當之無愧的萬能算法,如果能夠熟練掌握PID算法的設計與實現過程,對于一般的研發人員來講,應該是足夠
2022-07-05 17:47:11 8265
8265 算法的原理,然后帶大家使用FPGA來實現(C語言實現過程特別簡單)。 二. PID算法 PID取自比例、積分、微分三個英文字母的首字母。意味著算法由這三部分組成。 1. P 比例 ????運算過程為 期望值 減去 當前值 ,然后再乘上一個p系數,就得到了一個反
2023-07-20 09:23:124241 
????PID控制應該算是非常古老而且應用非常廣泛的控制算法了,小到熱水壺溫度控制,大到控制無人機的飛行姿態和飛行速度等等。在電機控制中,PID算法用得尤為常見。 位置式PID 1 計算公式
2023-08-23 09:31:145598 
這方面的需求而設計的。專家算法和模糊算法都歸屬于智能算法的范疇,智能算法最大的優點就是在控制模型未知的情況下,可以對模型進行控制。這里需要注意的是,專家PID 也好,模糊 PID 也罷,絕對不
2021-07-19 06:29:49
已經知道了,P,I,D是三種不同的調節作用,既可以單獨使用(P,I,D),也可以兩個兩個用(PI,PD),也可以三個一起用(PID)。關于PID原理應用的文章:PID控制在無人機中的應用。 這三種作用
2022-12-30 09:35:33
人們的首選。下面簡單來講解一下PID算法:首先PID算法是有比例,積分,微分三部分組成,先說下比例部分,所謂比例部分,就是呈線性關系,舉個例子,一個電熱絲加熱水,開始的時候溫度很低,離50℃很大,這時應該加大...
2021-07-15 09:44:13
目錄一. 緒論二. 角度環串級PID原理1. PID基本算法2. 姿態角串級PID原理三. 如何用STM32實現角度-角速度的串級PID控制1. PID算法的代碼實現2. 串級PID算法的代碼實現四
2021-08-17 06:44:18
對PID算法的愚見PID算法名字中的三個字母其實是此算法的三個核心系數:? P: 比例系數? I : 積分系數? D: 微分系數比例系數在只有比例系數的控制下,如果我們要讓四旋翼懸浮在100cm高度
2019-07-24 02:23:51
問題了,在我所接觸的控制算法當中,PID 控制算法又是最簡單,最能體現反饋思想的控制算法,可謂經典中的經典。經典的未必是復雜的,經典的東西常常是簡單的,而且是最簡單的,想想牛頓的力學三大定律吧,想想
2022-02-09 07:56:11
(pid.err)>200);index=0;;}else;index=1;;pid.sumerr+=pid這是什么意思呢?特別是abs()pid.err是什么啊在算法中
2015-08-06 10:13:41
幾乎沒有一種控制算法比?PID?調節規律更有效、更方便的了。現在一些時髦點的調節器基本源自?PID?。甚至可以這樣說:?PID?調節器是其它控制調節算法的MOM。 PID解決了自動控制理論所要
2016-03-23 10:10:07
PID調節是自動控制領域的經典算法。主要有三個參數,即P:比例系數。I:積分系數。D:微分系數。在PID調節過程中我們需要知道兩個值:1、系統當前狀態值(即反饋),即電機轉速的實際值。2、期望值。即
2021-09-07 06:38:00
名稱為“溫控儀”的儀表都能將溫度控制到你所期望到達的水平,選擇需謹慎。⑥所有數字調節器均P、I、D功能,但并不是所有工況都同時用到這三個功能,PID功能的選用參見下表 被控制的變量 PID調節器選擇 溫度
2018-01-04 21:14:24
使用“梯形圖”來編程,PLC是一種更加現代化的工具。目前的PLC具有基本的PID控制功能。PID調節器用于生產過程控制,隨著控制技術的發展,調節器PID控制算法突飛猛進,在復雜過程控制中效果優異。PID
2018-01-06 14:21:54
從6月份開始因為電賽開始接觸PID算法,到現在也算是有了一些經驗和收獲,馬上要電賽了,對單級PID做一個總結。再就是總結一下PID的調節的經驗。我就不說高大上的定義,談談我對PID算法的理解吧
2022-01-14 09:03:32
數值pid的計算:6.問題Kp,Ti,Td三個參數的設定是PID控制算法的關鍵問題。一般說來編程時只能設定他們的大概數值,并在系統運行時通過反復調試來確定最佳值。因此調試階段程序須得能隨時修改和記憶
2015-12-28 23:01:17
前言如何學習PID控制,最開始需要先拋開各種軟硬件,單純從數學上進行分析,弄懂底層的控制原理是什么?理解清楚后,無非把數學公式變成代碼。剩下就是不斷的實踐,來確定三個參數,使控制結果更加準確。開始介紹
2022-01-14 09:27:14
1 前言控制系統通常根據有沒有反饋會分為開環系統和閉環系統,在閉環系統的控制中,PID算法非常強大,其三個部分分別為;P:比例環節;I:積分環節;D:微分環節;PID算法可以自動對控制系統進行準確且
2021-06-28 09:27:46
PID的比例,積分,微分三個參數怎么確定呢?
2016-04-29 16:02:43
單片機中實際應用的時候需要操作定時器一起使用。二.簡單點的控制算法:位式控制算法主要就是控制的時pwm的脈沖寬度 ,單片機的話時ms為單位。圖片來說明:主要的描述也在框圖中表示。三.pid控制的實現需要對負載傳感器的值不斷的進行檢測,并且有的開關器件如可控硅二極管就可以運用在其中來進行控制(沒
2022-01-14 07:33:33
去年弄了一陣子Labview,因為要用到PID算法,然后寫了一個小小的測試程序,另外加上本人對于PID的理解,希望能對初學者有幫助,若有誤導,請多多指教實際調試:我們假設要調節的目標值為10,初始值
2017-04-12 18:14:15
STM32的PID算法的電源調節指導
2016-04-23 11:20:54
上一篇介紹了建立系統模型的三種方法,這一篇介紹如何調節pid,并用MATLAB仿真調節pid的目標就是使得從模型中得到的增益能夠使物理系統正常工作調節pid的理論分析pid的一般形式如下圖經過移動
2021-09-01 07:24:40
電子發燒友總結了以“PID算法”為主題的精選干貨,今后每天一個主題為一期,希望對各位有所幫助!(點擊標題即可進入頁面下載相關資料)電子書資料:PID算法高手的經驗總結與調試圖解(附代碼)視頻教學資料
2019-05-30 19:32:08
時k=-1。
步進式PID雖然可以減少階躍信號帶來的干擾,但是也會讓系統的響應速度變慢,可以調節步長來平衡兩者之間的關系。步長越小運行越穩定,系統響應速度越慢,反之亦然。
三、PID算法優化
01
積分
2023-12-22 15:38:41
什么是PID控制算法呢?PID控制算法有何作用?PID控制算法有哪幾種類型呢?如何對其進行測試?
2022-02-25 07:36:44
什么是PID控制算法?PID控制算法C語言是如何實現的?特殊情況下的控制算法該如何去調整?比例、積分、微分三個環節的控制作用分別是什么?
2021-06-29 09:24:32
什么是PID?PID控制器主要有哪些應用?位置式PID與增量式PID的區別在哪?位置式PID優缺點有哪些?增量式PID優缺點有哪些?
2021-07-13 08:13:27
前文對PID算法離散化和增量式PID算法原理進行來探索,之后又使用Matlab進行了仿真實驗,對PID三個參數又有了更深入的認識,接下來我們來使用C語言進行PID算法實現,并且結合控制電機的項目來
2021-09-15 09:20:04
前文對PID算法離散化和增量式PID算法原理進行來探索,之后又使用Matlab進行了仿真實驗,對PID三個參數又有了更深入的認識,接下來我們來使用C語言進行PID算法實現,并且結合控制電機的項目來深入學習。
2021-09-16 09:11:08
:這篇文章分為三個部分:PID原理普及常用四軸的兩種PID算法講解(單環PID、串級PID)如何做到垂直起飛、四軸飛行時為何會飄、如何做到脫控?PID原理普及1、對自動控制系統的基本要求:穩、準、快:穩定性(P
2018-07-14 14:34:29
流程圖 PID控制算法采用位置式數字PID控制: 式(7)中u(t)為PID輸出值,e(t)為期望值與實際值之差,為積分量,為微分量,kp,、ki、kd。為比例、積分、微分系數。在將積分量,微分量離散化
2016-01-15 17:03:00
盡快進入狀態。特地分享一些自己如何實現的過程。首先說說增量式PID的公式,這個關系到MCU算法公式的書寫,實際上兩個公式的寫法是同一個公式變換來得,不同的是系數的差異。資料上比較多的是:還有一種的算法是:這里主要介紹第二種,具體會分析比例、積分、微分三個環節...
2021-09-13 06:54:20
運用PID很多年,分享一下快速調節PID的經驗~~~~
2013-12-03 00:02:44
。當采用PID控制器還達不到工藝要求,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。5、公式:數值pid的計算:6、問題。Kp,ti,Td三個參數的設定是PID控制算法的關鍵問題
2019-05-30 08:30:00
,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。 5,公式: 數值pid的計算: 6,問題。Kp,Ti,Td三個參數的設定是PID控制算法的關鍵問題。一般說來編程時只能設定他們的大概
2016-01-26 17:51:45
:(simulink)可以清晰的看到三個部分:Kp(比例部分):可以減少系統的穩態誤差但不能消除它徹底,可以減少系統飛上升時間。Ki(積分環節):可以徹底消除穩態誤差但是會使系統的瞬態響應變的更不穩定。Kd
2016-01-29 16:50:21
這是在公眾號上看到的一篇文章,整理了一下,為后面看方便。PID算法1 什么是PIDPID,即比例Proportion、積分Integral和微分Derivative三個單詞的縮寫。閉環自動控制技術
2020-06-22 11:37:44
微型計算機實驗報告目錄實驗一A/D與D/A轉換1實驗二數字濾波器4實驗三離散化方法研究7實驗四數字PID調節器算法的研究12實驗五串級控制算法的研究17實驗六解耦控制算法的研究21實驗七最少拍控制
2021-09-10 06:56:32
數字式PID調節算法的具體工作原理是什么?
2022-02-11 08:11:52
調節法的優缺點(好像這種方法只能給一個調節的大概位置,具體參數值還得繼續做實驗調出來)4、頻率響應法設計PID參數的優缺點?5、以及還存在哪些高效實用的PID參數調節方法?熱忱歡迎懂PID控制的知友討論。上述問題如若表述有誤,還請指出來修正。補充:暫且定一個標準:最大過調量小于10%,調整時間0.5秒以內!
2018-07-30 10:29:20
PID控制算法。 位置式PID控制算法的缺點:當前采樣時刻的輸出與過去的各個狀態有關,計算時要對e(k)進行累加,運算量大;而且控制器的輸出u(k)對應的是執行機構的實際位置,如果計算機出現故障,u(k
2016-01-15 18:35:33
,KD=0 KP=1,KI=0,KD=0 KP=10,KI=0,KD=0 這三個效果 那個更好呢? 還有就是需要將KP調節到什么程度才能調節ki kd?
2019-07-17 02:49:16
PID調節的實質是什么?
經常看到有關PID調節問題書籍,看來看去看不懂他們再說什么。還有一些技術員一提起PID調節,就搖頭,搞不懂呀!那么PID調節的實質是什么?通俗
2009-07-04 08:34:22 126
126
簡單的PID調節電路
2009-02-25 21:52:432311 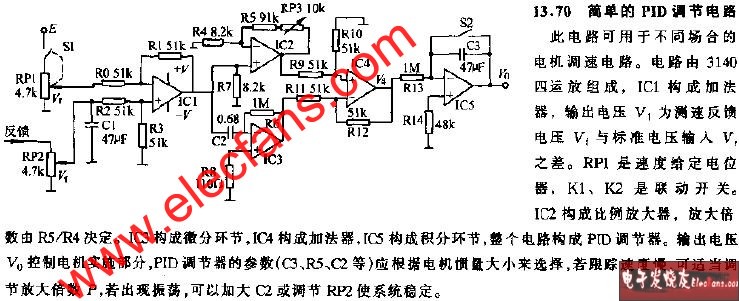
PID控制器是一種最優控制。本文講述了增量式PID算法原理與數字PID算法原理與數字PID算法程序,詳細講解了什么是pid算法。
2012-01-01 11:58:2111919 
PID控制原理和特點 工程實際中,應用最為廣泛調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。PID控制器問世至今已有近70年歷史,它以其結構簡單、穩定性好、工
2012-09-09 09:45:35197447 
傳統的PID控制對于控制模型不確定并具有非線性特性的對象時,存在參數難以整定、控制效果不好的缺點,文中提出了一種基于蟻群算法的PID調節算法,即利用蟻群算法動態調節PID的參
2012-10-10 14:43:3559 PID算法程序,典型的PID應用,使用時直接套用就可以了
2015-11-12 16:58:3240 PID調節的通俗化理解 用于APM,PID,調節。
2016-03-16 09:28:153 基于PID算法的溫度控制系統,PID算法溫控C語言程序
2016-07-12 16:05:5251 PID原理與C語言算法小合集,包含PID原理講解與不同形式PID的C語言程序源碼
2016-07-12 16:05:5234 PID控制算法控制算法
2016-11-17 11:43:1612 PID調節控制電機
2016-11-17 18:35:2313 PID算法實現C語言(位置式PID)STCunio數字電源帶PID數字閉環結合51單片機arduino完成步進電機增量式PID-STM32實現
2016-12-17 11:58:5620 1。PID是一種控制算法,是比例作用P、積分作用I、和微分作用D的總稱。這三個作用可合成和分離成PI、PD,和PID這幾個作用。
2017-08-18 15:36:0617410 想進一步了解 PID 控制器,必須首先熟悉PID 算法,這也是筆者為什么在下面的內容里大費周章討論這個問題的原因所在。 PID 控制器調節輸出,是為了保證偏差值(e 值)為零,使系統達到一個預期穩定狀態。這里的偏差(e)是給定值(SP)和過程變量值(PV)的
2017-11-21 17:03:0431 通過調整比例、積分和微分三項參數,使得大多數的工業控制系統獲得良好的閉環控制性能。通常依據控制器輸出與執行機構的對應關系,將基本數字PID算法分為位置式PID和增量式PID兩種。
2017-11-24 14:20:3199369 PID調節規律是自動控制系統中常見而典型的控制策略,其中模擬式PID器是最基本的實現手段與方式。它由比例、積分、微分三種基本電路所構成。根據不同的需求可構成比例(P)調節、比例積分(PI)調節、比例微分(PD)調節、比例積分微分(PID)調節電路。
2017-11-24 17:34:2329412 
本文檔的主要內容詳細介紹的是PID程序算法的詳細資料概述免費下載
2018-07-24 08:00:0036 ;?? ?printf("PID_init end \n");}統一初始化變量,尤其是Kp,Ki,Kd三個參數,調試過程當中,對于要求的控制效果,可以通過調節這三個量直接進行調節。第三步:編寫控制算法,代碼
2018-08-13 15:03:452182 從傳統 PID 的原理出發, 分析了它的優缺點。利用非線性機制來開發了一些具有特殊功能的環節:跟蹤微分器(TD), 擴張狀態觀測器(ESO), 非線性 PID(NPID)等, 并以此組合出高品質
2018-11-06 08:00:000 本文檔的主要內容詳細介紹的是數字PID控制算法教程之如何對標準PID算法進行改進主要內容包括了:對標準PID算法的改進,飽和問題及其抑制,數字濾波,Smith
2018-12-04 08:00:0015 本文主要介紹了PID控制器的優缺點及作用。PID控制適應性好,有較強的魯棒性,對各種工業場合,都可在不同的程度上應用。特別適于“一階慣性環節+純滯后”和“二階慣性環節+純滯后”的過程控制對象。
2019-07-18 15:17:1952553 PID控制中有P、I、D三個參數,只有明白這三個參數的含義和作用才能完成控制器PID參數整定,讓控制器到達最佳控制效果。能熟練進行PID參數整定,將自動控制系統投自動,這代表著工程技術人員的自動化技能水平,但很多人并未真正掌握PID控制和PID參數整定。
2019-07-18 16:10:3235115 
經常看到有關PID調節問題書籍,看來看去看不懂他們再說什么。還有一些技術員一提起PID調節,就搖頭,搞不懂呀!那么PID調節的實質是什么?通俗的概念是什么?我們通過圖1進行分析。
2019-08-07 08:00:0013 PID控制應該算是應用非常廣泛的控制算法了。
2019-08-12 08:39:1210444 
1、PID回路控制概述 PID控制器是應用最廣泛的閉環控制器,它根據給定值與被控實測值之間的偏差;按照PID算法計算出控制器的輸出量,控制執行機構進行調節,使被控量跟隨給定量變化,并使系統達到穩定
2020-11-03 16:16:477116 
PID調節及PID調節的基本原理免費下載。
2021-04-25 15:41:4451 PID調節方法講解免費下載。
2021-05-25 16:01:1864 pid控制三個參數怎么調整?
2021-09-19 09:08:0050416 沒有一種控制算法比PID調節規律更有效、更方便的了。現在一些時髦點的調節器基本源自PID。甚至可以這樣說:PID調節器是其它控制調節算法的嗎。
2021-10-06 11:18:0021337 PID自動調節直流電機的速度(電源技術的現狀)-PID自動調節直流電機的速度。認為規定直流轉多少轉,通過PID算法自動控制穩定在規定的轉速內!
2021-09-24 12:50:3451 最近在學習與無人機有關的一些控制算法,在這里做一些筆記,今天學的是有關于PID的算法。什么是PID首先關于PID的定義,因為我本身不是自動控制專業出身所以對于概念這個東西比較模糊,可以去社區里面搜
2022-01-14 11:13:529 控制系統通常根據有沒有反饋會分為開環系統和閉環系統,在閉環系統的控制中,PID算法非常強大,其三個部分分別為;
2022-03-30 14:01:2214841 PID調節器是一種常見的控制系統,它可以通過對輸入信號進行處理,控制輸出信號來維持目標參數的穩定性。PID調節器的三個重要參數如下:
比例系數(P):比例系數是PID調節器中最基本的參數
2023-03-25 11:37:2725320 PID調節器是一種基于比例-積分-微分(PID)控制算法的自動控制系統,它通過不斷地調整控制量,使被控對象的輸出值逐漸趨近目標值,從而實現自動控制。PID調節器廣泛應用于各種工業自動化控制系統中
2023-03-25 11:39:335491 ** PID控制算法** ,是結合比例(P)、積分(I)和微分(D)三環所提供的負反饋信號來修正系統誤差,以保障系統相對穩定或平衡的控制算法。
但它不等同于三環控制,三環控制僅是PID算法的具體應用之一。
2023-05-19 16:48:582771 
(一)PID基本概述:3-1連續-時間PID控制系統1,PID是一個閉環控制算法。因此要實現PID算法,必須在硬件上具有閉環控制,就是得有反饋。比如控制一個電機的轉速,就得有一個測量轉速的傳感器
2022-05-13 15:24:592276 
PID控制算法是自動控制中的一個非常典型且重要的算法,可以明確的說,對于學自動控制的朋友來說,不懂PID控制,那就等于沒真正的學過自動控制。
2023-08-22 11:01:2731261 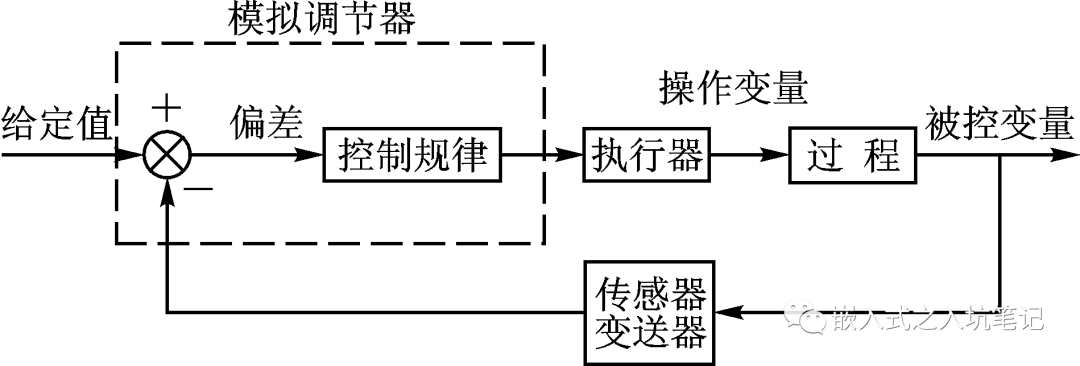
PID算法通過誤差信號控制被控量,而控制器本身就是比例、積分、微分三個環節的加和。史上最全的PID算法教程,從建模到實際應用!
2023-08-23 16:46:533 當涉及到控制系統中的精確調節和穩定性,PID(比例-積分-微分)控制算法是一種不可或缺的工具。本文將簡單介紹 PID 控制算法,從基本概念到具體實現,一起了解如何使用 PID 控制算法來優化控制系統。
2023-08-29 16:39:045263 
熟透于心的15個PID基本概念。 先讀一首PID打油詩 1、被調量 被調量就是反映被調對象的實際波動的量值。被調量是經常變化的。 2、設定值 PID調節器設定值就是人們期待被調量需要達到的值。設定值可以是固定的,也可以是變化的。 3、控制輸出 控制輸出指PID調節器
2023-09-25 19:40:013587 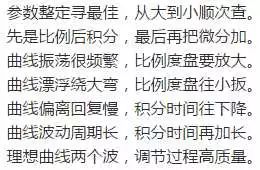
PID調節是一種廣泛用于工業控制系統中的反饋回路控制方法。通過調整比例(P)、積分(I)和微分(D)三個參數,可以有效地控制系統誤差,提高系統的穩定性和響應速度。下面將詳細介紹PID調節參數設置
2023-11-24 14:14:5556051 在計算機科學中,PID(進程標識符)是一個用于唯一標識運行中的進程的整數值。PID主要具有以下三個參數作用: 進程創建:PID參數用于在操作系統中創建新的進程。當操作系統啟動一個進程時,會為其分配一
2024-01-16 14:56:3414062 參數對系統的影響。 一、PID控制原理 PID控制的基本原理是根據反饋信號來調整輸出控制量,使得系統的實際輸出與期望輸出盡可能接近。 PID控制器的基本結構由三個分別對應于比例(Proportional
2024-01-22 15:35:009827 ),這三個參數共同作用于控制器,以實現對系統輸出的精確控制。 一、PID控制器的組成 PID控制器由三個基本部分組成:比例項(P)、積分項(I)和微分項(D)。 比例項(P) :比例項是控制器輸出與偏差(期望值與實際值之間的差)的直接比例。比例增益(Kp)越大,控制器對偏差的反應越
2024-11-06 10:28:442719 控制算法結構簡單,易于理解和實現,不需要復雜的數學模型。 適應性強 :PID控制器能夠適應多種類型的系統,具有較好的魯棒性。 調節方便 :通過調整比例、積分、微分三個參數,可以靈活地調整控制效果。 廣泛應用 :PID控制適用于各種工業過程,如
2024-11-06 10:33:106682 PID調節器是一種廣泛應用于工業控制系統中的控制器,它根據給定的參考值(設定值)和實際測量值(過程變量)之間的偏差來調整控制信號,以達到控制目標。PID調節器的名稱來源于其三個基本控制動作:比例
2024-11-06 10:38:392701 在現代工業自動化控制系統中,PID控制器因其簡單、高效而被廣泛使用。PID控制器的三個參數——比例(P)、積分(I)和微分(D)——共同決定了系統的動態響應和穩定性。 PID控制器原理簡述 PID
2024-11-13 14:31:3313840 ,還可能導致設備損壞。PID控制器因其能夠提供快速響應和穩定性而被廣泛應用于溫度控制。PID控制器通過調整控制信號來減少溫度偏差,實現溫度的穩定控制。 2. PID控制原理 PID控制器由三個基本部分組成:比例(P)、積分(I)和微分(D)。
2024-11-13 14:39:065076 PID控制(比例-積分-微分控制)是一種常見的反饋控制算法,廣泛應用于工業控制系統中。在Python中實現PID控制,我們可以遵循以下步驟: 1. 理解PID控制原理 PID控制器有三個主要參數
2024-11-14 09:09:452182
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論