") 什么是pid控制原理 pid各個(gè)參數(shù)對(duì)系統(tǒng)的影響
什么是pid控制原理 pid各個(gè)參數(shù)對(duì)系統(tǒng)的影響

PID(Proportional-Integral-Derivative)控制是一種常見(jiàn)的控制算法,廣泛應(yīng)用于工業(yè)過(guò)程控制、機(jī)器人控制、自動(dòng)駕駛等領(lǐng)域。本文將詳細(xì)介紹PID控制的原理以及其中的各個(gè)參數(shù)對(duì)系統(tǒng)的影響。
一、PID控制原理
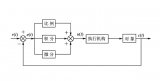
PID控制的基本原理是根據(jù)反饋信號(hào)來(lái)調(diào)整輸出控制量,使得系統(tǒng)的實(shí)際輸出與期望輸出盡可能接近。
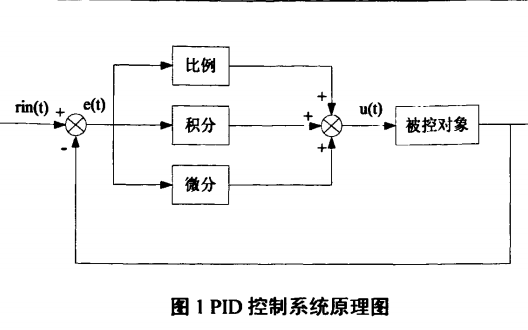
PID控制器的基本結(jié)構(gòu)由三個(gè)分別對(duì)應(yīng)于比例(Proportional)、積分(Integral)和微分(Derivative)作用的控制部分組成。PID控制器的輸出為下式所示:
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
其中,u(t)表示控制器的輸出,e(t)為期望輸出與實(shí)際輸出的差值,Kp、Ki和Kd為控制的比例、積分和微分參數(shù)。
比例控制(Proportional Control)是根據(jù)偏差的大小進(jìn)行直接調(diào)節(jié),偏差越大,則輸出控制量越大,反之亦然。比例控制能夠快速響應(yīng)系統(tǒng),但不能完全消除穩(wěn)態(tài)誤差。
積分控制(Integral Control)通過(guò)積分偏差來(lái)消除穩(wěn)態(tài)誤差。其作用是對(duì)積分偏差的積分進(jìn)行調(diào)節(jié),使得積分偏差逐漸減小,使系統(tǒng)達(dá)到穩(wěn)態(tài)。
微分控制(Derivative Control)根據(jù)偏差的變化速率進(jìn)行調(diào)節(jié),即根據(jù)偏差的斜率來(lái)預(yù)測(cè)未來(lái)的偏差變化趨勢(shì),通過(guò)調(diào)整控制量來(lái)減小偏差。微分控制具有抑制系統(tǒng)震蕩和提高系統(tǒng)響應(yīng)速度的作用。
二、PID參數(shù)對(duì)系統(tǒng)的影響
PID控制器的性能與其三個(gè)參數(shù)的選擇有關(guān)。下面將詳細(xì)介紹各個(gè)參數(shù)對(duì)系統(tǒng)的影響:
- 比例參數(shù)(Kp):增大比例參數(shù)會(huì)增加控制器的輸出,使系統(tǒng)更快的響應(yīng),但同時(shí)也可能導(dǎo)致系統(tǒng)的過(guò)沖(overshoot)和振蕩(oscillation)現(xiàn)象。
- 積分參數(shù)(Ki):增大積分參數(shù)會(huì)增加積分作用的強(qiáng)度,可以有效消除穩(wěn)態(tài)誤差,但過(guò)大的積分參數(shù)會(huì)導(dǎo)致系統(tǒng)響應(yīng)速度變慢、振蕩或不穩(wěn)定。
- 微分參數(shù)(Kd):增大微分參數(shù)可以提高系統(tǒng)的響應(yīng)速度,減小振蕩幅度,但過(guò)大的微分參數(shù)會(huì)增加系統(tǒng)對(duì)噪聲的敏感性。
綜上所述,合理選擇PID控制的參數(shù)可以使系統(tǒng)在偏差快速消除的同時(shí),保持穩(wěn)定性和抗干擾能力。具體選擇參數(shù)的方法有很多,通常需要通過(guò)實(shí)驗(yàn)、經(jīng)驗(yàn)和調(diào)試來(lái)找到適合特定系統(tǒng)的參數(shù)配置。
PID控制是一種常見(jiàn)且有效的控制算法,通過(guò)比例、積分和微分的控制原理實(shí)現(xiàn)對(duì)系統(tǒng)的調(diào)節(jié)。比例控制直接根據(jù)偏差調(diào)節(jié)輸出,積分控制消除穩(wěn)態(tài)誤差,微分控制預(yù)測(cè)未來(lái)偏差變化趨勢(shì)。各個(gè)參數(shù)對(duì)系統(tǒng)的影響不同,合理選擇參數(shù)可以使系統(tǒng)快速響應(yīng)、穩(wěn)定、抗干擾能力強(qiáng)。通過(guò)實(shí)驗(yàn)、經(jīng)驗(yàn)和調(diào)試等方法,可以找到適合特定系統(tǒng)的參數(shù)配置。
-
噪聲
+關(guān)注
關(guān)注
13文章
1156瀏覽量
49223 -
PID
+關(guān)注
關(guān)注
38文章
1499瀏覽量
91156 -
控制算法
+關(guān)注
關(guān)注
4文章
171瀏覽量
22739 -
反饋信號(hào)
+關(guān)注
關(guān)注
0文章
32瀏覽量
8448
發(fā)布評(píng)論請(qǐng)先 登錄
PID控制系統(tǒng)的參數(shù)調(diào)節(jié)技巧
PID控制原理及手動(dòng)調(diào)諧PID參數(shù)
工業(yè)控制PID系統(tǒng)的參數(shù)介紹
PID控制的理論和PID控制器設(shè)計(jì)的及PID控制器參數(shù)整定的以及分析
PID控制中P、I、D參數(shù)的作用
PID各參數(shù)對(duì)運(yùn)算輸出的影響
pid各參數(shù)對(duì)系統(tǒng)的影響
PID控制中如何整定PID參數(shù)
什么是PID?PID各個(gè)參數(shù)有什么作用?
PID控制中P、I、D參數(shù)的作用
什么是PID?PID各個(gè)參數(shù)有什么作用?
什么是PID?PID各個(gè)參數(shù)有什么作用?



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論